
Fターム[3D244AD21]の内容
Fターム[3D244AD21]に分類される特許
81 - 100 / 424
運転支援装置
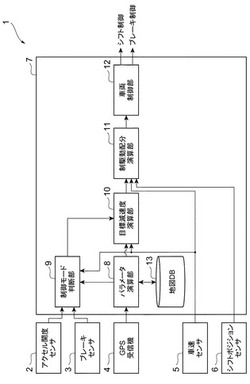
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車両用速度制御装置

【課題】目的とする車速に向けて車速を低下させる場合に、運転者にとって操作の煩わしさや操作のしにくさをより生じにくくすることを可能にする。
【解決手段】車両の運転者からの操作入力を受けてON状態に切り替わったことを示す手動スイッチ信号を出力する手動スイッチ7と、手動スイッチ信号に従って、現在の設定車速から所定の量の速度を減じた新設定車速を算出する設定車速決定部11と、一定時間をかけて現在の設定車速から新設定車速へ移行するために逐次とるべき目標速度を算出する目標速度算出部12と、目標速度と現在車速との差をもとに、目標速度を実現するために必要な減速度である要求減速度を算出する要求減速度算出部13と、を備え、逐次算出される要求減速度に従った減速度で逐次減速を行わせていくことによって新設定車速に自車速を合わせる。
(もっと読む)
走行制御装置
【課題】 渋滞時における加減速の抑制が図られた走行制御装置を提供する。
【解決手段】
本発明に係る走行制御装置1において、ECU2は、平均速度算出手段として、通信部4を介して自車の前方を走行している複数の前方走行車両の速度を取得し、それらの平均速度を求める。また、ECU2は、制御速度決定手段として、求めた平均速度に応じて、自車の制御速度を決定する。そのため、ECU2は、走行駆動部6や制動部7に対して所定の信号を送り、決定した制御速度での定速走行を自車におこなわせることができる。したがって、自車Nは直前の車両のみに追従するような加減速走行はせずに、複数の前方走行車両の平均速度に応じた制御速度で定速走行するため、加減速が抑制され、燃費の向上や渋滞解消の促進が図られる。
(もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
車両用追従走行制御装置
【課題】 車両用追従走行制御装置において、自車が先行車の発進に追従して自動的に発進する機能を備えていると運転者が誤認するのを防止する。
【解決手段】 停止した先行車Vbに追従して停止しようとした自車Vaの減速中に先行車Vbが発進した場合、自車Vaが先行車Vbに追従してそのまま加速すると、運転者は自車が自動発進機能を備えていると誤認する可能性がある。そこで先行車Vbの停止位置に仮想先行車Vb′を設定することで、実際の先行車Vbが発進した場合でも、停止中の仮想先行車Vb′に追従して自車Vaを一旦停止させる。その結果、運転者が発進スイッチを操作して発進意思を示すまで自車Vaは発進することがなくなり、自車が自動発進機能を備えていると運転者が誤認するのを防止することができる。
(もっと読む)
車間距離制御装置
【課題】先行車をロストした場合においても、ドライバにとって違和感の少ない適切な制御を行う。
【解決手段】制御継続判定部13でロスト判定部11のロスト判定結果とノーズダイブ判定部12のノーズダイブ判定結果とからACC制御を継続するか否かを判定する。低速時に先行車をロストしたと判定され、且つ自車の減速度が閾値以上でブレーキ作動が設定時間以上継続してノーズダイブしていると判定されたときには、ACC制御の継続を指示し、先行車をロストしたと判定されても、自車がノーズダイブしていないと判定された場合には、ACC制御を解除する。ACC制御を継続する場合、制御継続部14で先行車のロスト時の車間距離と車速とから現在の車間距離を推定し、推定した車間距離に基づいてACC制御を継続する。これにより、先行車をロストした場合においても、ドライバにとって違和感の少ない適切な制御とすることができる。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
車速制御装置
【課題】車両の運転状態に応じて一定速走行を開始することのできる車速制御装置を提供する。
【解決手段】所定時間内における車両の速度Vが所定の車速の範囲内である場合に車速Vを一定に制御する車速制御装置において、所定時間内における車両の運転状態に応じた車速Vの変化幅が所定の変化幅ΔVよりも小さいことを判断する変化幅判断手段(ステップS3)と、所定時間内における車両に対し制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さいことを判断する制動力要求操作頻度判断手段(ステップS4)と、車両の速度の変化幅が所定の変化幅ΔVよりも小さく、かつ制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さく、かつ駆動力を発生させる駆動力要求操作がOFFになった場合に、車速が一定になるように制御を開始する一定速制御開始手段(ステップS9)とを備えている。
(もっと読む)
車両用制御装置
【課題】この発明は、ヨーレートセンサの値を学習補正する場合において、精度の高い学習補正を常に実施でき、学習補正の精度を高めることで、精度の高い自車線の推定が可能な車両用制御装置を提供することを目的とする。
【解決手段】この発明は、ヨーレートセンサの値を、車両の走行安定性を保つための制御に利用する第1の制御装置と、前記ヨーレートセンサの値を、車両の制御に利用する第2の制御装置とを備えた車両用制御装置において、前記ヨーレートセンサが計測した値を、学習補正した値に補正する学習手段を備え、前記学習手段により学習補正した値を用いて、前記二つの制御装置はそれぞれの制御を行い、前記学習手段は、車両の状態に応じて、前記第1の制御装置、あるいは第2の制御装置のどちらか一方を用いて学習補正を実施することを特徴とする。
(もっと読む)
定速走行制御装置
【課題】アクセルペダル操作によって目標車速を変更できる定速走行制御装置において、様々な運転シーンにおいて違和感の少ない加減速度制御を行うことができるようにする。
【解決手段】アクセルペダルの操作量に応じて変更される目標車速Vo_tと現在の自車速Vo_pとを用いて算出される要求加速度Gx_tを、要求加速度変更手段55において、加速度上限値によって制限する。この加速度上限値は、現在の自車速Vo_pが現在車速閾値TH_pよりも高い場合、現在の自車速Vo_pがそれよりも低い場合より低く設定される。そのため、高速走行中における意図しない急加速を抑制することができる。また、アクセルペダルが大きく踏み込まれ高い目標車速Vo_tが設定されたときには、1よりも大きい第1ゲインが乗じられて加速度上限値が高い値に変更される結果、高い要求加速度Gx_tが設定されることになる。
(もっと読む)
車両用走行制御装置
【課題】コーナーの出口などで追従走行制御の開始操作が行われたときに、迅速に制御対象を決定する。
【解決手段】自車両前方の物体を検出するレーダ装置15と、自車両の推定走行軌跡を中心として設定される所定の幅を有する制御対象決定領域およびレーダ装置15の出力に基づいて制御対象を決定する制御対象決定部34と、制御対象と自車両との相対距離に基づいて追従走行制御を行う走行制御部37と、運転者により操作され追従走行制御を開始する制御開始スイッチ16と、を備え、制御対象決定部34は、追従走行制御が実行されておらず且つ自車両の走行路が直線でなく、制御開始スイッチ16により追従走行制御の開始操作が行われた場合に、レーダ装置15により自車両の正面に検出された物体を制御対象に決定する。
(もっと読む)
走行支援装置
【課題】本発明は、移動体の適切な上限速度を設定する走行支援装置を提供することを課題とする。
【解決手段】移動体の移動速度の上限速度に基づいて走行支援を行う走行支援装置1であって、移動体の周辺に存在する物体を検出する周辺物体検出手段10,31と、周辺物体検出手段で検出した周辺物体が移動体の進路上の領域に存在する場合と当該進路上の領域の側方領域に存在する場合とで異なる上限速度を設定する上限速度設定手段32とを備えることを特徴とする。
(もっと読む)
運転支援装置
【課題】必要な状況にのみ走行支援を行ない、運転者が違和感を覚えることなく自車両の衝突を防止することのできる運転支援装置を提供する。
【解決手段】障害物と自車両Cとの衝突を回避するための衝突回避制御を行なう運転支援装置1において、自車両Cの前方の信号機Sに関する信号機情報に基づいて自車両Cが減速するか否かを予測する予測部22と、減速が予測された場合に衝突回避制御の実行を抑制する制御部23と、を備える。この構成により、自車両Cの減速が予測された場合に、衝突回避制御の実行が抑制される。これにより、自車両Cの減速が予測されたため衝突回避制御の実行は不要と予測される状況で衝突回避制御は抑制されるといったように、信号機情報に基づいて必要な状況にのみ、走行支援としての衝突回避制御が行われ、運転者が違和感を覚えることなく自車両Cの衝突を防止することができる。
(もっと読む)
車両制御装置
【課題】車両挙動の悪化を防止し、適切な制御を行える車両制御装置を提供する。
【解決手段】 車両制御装置1は、先行車両に対する追従走行の制御を行う車両制御ECU2を備える。車両制御ECU2は、先行車両との距離が設定車間距離となる地点を演算する設定車間距離到達地点演算部22、設定車間距離となる地点での車両挙動を予測する車両挙動状態予測部23、予測された車両挙動が不安定になるかを判定する車両挙動安定判定部24を有する。車両制御ECU2は、車両挙動状態予測部23により予測した結果に応じて、設定車間距離となる地点及びそれ以後における追従走行の制御特性を変更する。
(もっと読む)
車両走行制御装置
【課題】運転者の意図に沿った車両の走行制御が可能な車両走行制御装置を提供する。
【解決手段】車両走行制御装置は、車両の現在地から目的地までの走行ルートR1を複数の走行区間r11〜r14に任意に分割し、その分割した各走行区間r11〜r14に対して走行制御用パラメータを設定し、車両Sが走行区間r11〜r14に進入した場合に、走行区間r11〜r14に対して設定されている走行制御用パラメータに基づいて車両の走行を制御する。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
前後加速度制御装置
【課題】外乱によるフィードフォワード制御の精度低下を補完し、前後加速度制御性能を向上させる。
【解決手段】パワトレフィードフォワードトルクの信頼性が外乱要因による推定ブレーキトルクの信頼度の低下に伴って低下するため、パワトレフィードバックトルクをブレーキ信頼性を加味したパワトレトルクの信頼度に応じて補正する。また、ブレーキフィードフォワードトルクの信頼性が外乱要因による推定パワトレトルクの信頼度の低下に伴って低下するため、ブレーキフィードバックトルクをパワトレ信頼性を加味したブレーキトルクの信頼度に応じて補正する。これらにより、パワトレフィードフォワードトルクやブレーキフィードフォワードトルクの信頼性の低下分をパワトレフィードバックトルクもしくはブレーキフィードバックトルクの補正によって補完することが可能となる。
(もっと読む)
車両運転支援装置
【課題】停車場所の状況により必要な車間距離を取って停車するように運転者に促したり制動を掛けたりするとともに、必要に応じて衝突の回避措置を強制的に行ない、他車両との衝突を確実に防止する。
【解決手段】車両(自車)100の前方もしくは後方の車間距離と、自車100の接地面の勾配や状況とに基づき、自車100の前方もしくは後方について必要な車間距離が決定され、この必要車間距離と現在の車間距離とに応じ、自車100の運転者に対する通知もしくは警報または自車100の制動もしくは操舵が行なわれる。
(もっと読む)
車間距離制御装置
【課題】 車速変動を低減して燃費悪化を抑制することを可能とした車間距離制御装置を提供する。
【解決手段】 レーダ11、12やカメラ21、22、車々間通信機41等で取得した隣接車線を含む他車両の状況、車線の状態といった車両の走行環境から車間制御ECU31は、先行車両と自車両との間に他車両が割り込んでくる割り込み可能性を判定し、当該割り込み可能性が低いと判定した場合には、そうでない場合に比較して先行車両との車間距離が長くなるようエンジンECU51、ブレーキECU61により、車両の加減速状態を制御する。
(もっと読む)
車両走行制御装置
【課題】ドライバがアクセルペダルを踏んだままの状態で、自動で追従制御を開始し、ドライバがアクセルペダルを踏み込むと追従制御が解除される車両走行制御装置。
【解決手段】アクセルペダルの操作の変化量が、所定の範囲内に所定の時間以上、留まる場合、通常制御から追従制御へ切替え、先行車との車間距離を所定の距離に保つ自動制御を開始し、アクセルペダルの操作の変化量が、所定値以上増加した場合には、追従制御から通常制御へ復帰する、アクセル操作反力演算部からの指令値に応じて操作反力を前記アクセルペダルに発生させる、また、追従制御から通常制御に切り替わった時に、前記追従制御部のトルク指令値から前記通常制御部のトルク指令値へ所定の傾きをもって切替えること。
(もっと読む)
81 - 100 / 424
[ Back to top ]