
Fターム[3D244AD21]の内容
Fターム[3D244AD21]に分類される特許
161 - 180 / 424
車両の走行制御装置
【課題】追従走行制御中に、先行車を見失った場合であっても、運転者に不快感及び違和感を与えることなく、運転者のフィーリングに合った報知を行うことができるようにする。
【解決手段】先行車を捕捉する前方認識装置3と、前方認識装置3で先行車を捕捉した場合に、この先行車に対する追従走行制御を行う制御ユニット2と、前方認識装置3が先行車を捕捉したとき或いは捕捉した先行車が離脱したときに報知するブザー6cとを備え、制御ユニット2は、前方認識装置3が先行車をロストしたときはブザー6cによる報知を禁止する。
(もっと読む)
車両用追従装置

【課題】不要に移動体が先行車として設定されることを低減し、制御精度の向上が図られた車両用追従装置を提供すること。
【解決手段】設定された先行車に追従する追従制御を行う車両用追従装置において、自車両100前方の他車両102の方向指示器が作動中であると判定された場合に、他車両102の方向指示器が作動中であると判定されなかった場合より、他車両102を先行車と設定し難くするように設定条件を変更する設定条件変更手段を備える構成とする。これにより、自車両100前方の他車両102が車線を離脱する可能性が高いにも関わらず、不要に先行車として設定されることを防止する。また、他車両102が先行車として設定されている場合には、設定された他車両102が車線を離脱する前に、先行車としての設定を解除し易くする。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作の解除後に、車両が急加速することを抑制することができる車両走行制御装置を提供すること。
【解決手段】運転者の制動操作に基づいて油圧による制動トルクを発生するブレーキ装置を有する車両の車速を予め設定された目標車速となるように、エンジンが発生する駆動トルクを制御することで自動走行制御を行う車両走行制御装置において、エンジンは、運転者の加速操作に基づいても駆動トルクを発生するものであり、自動走行制御は、運転者による制動操作の解除に基づいて、運転者による加速操作に拘わらず行われる。運転者による制動操作が解除された場合(ステップST4)、運転者による制動操作の解除から所定時間T(ステップST6)は、エンジンが発生する駆動トルクを車速Vを目標車速Voとすることができる駆動トルクよりも小さく制限されるように、今回の目標駆動トルクETo(n)を算出する(ステップST7,ST8)。
(もっと読む)
車両用運転支援装置
【課題】本発明は、アダプティブ・クルーズ・コントロール運転において燃料消費率の悪化を抑制できる車両用運転支援装置を提供する。
【解決手段】 車両用運転支援装置40は、先行車両30との車間距離を検出するスキャン式レーザレーダ41とECU50となどを備えている。ECU50は、先行車両認識部51と目標車速演算部53となどを備えている。先行車両認識部51は、スキャン式レーザレーダ41の検出結果に基づいて先行車両30の車速を検出する。目標車速演算部53は、通常追従モードであるかもしくはエコ追従モードであるかを判定する。目標車速演算部53は、自動車10が通常追従モードであると、通常追従モードに対応する加速で先行車両30を追従すべく目標車速を設定するとともに、自動車10がエコ追従モードであると、通常追従モードよりも小さい加速で先行車両30を追従すべく目標車速を設定する。
(もっと読む)
車両用追従装置
【課題】不要に移動体が先行車として設定されることを低減し、制御精度の向上が図られた車両用追従装置を提供すること。
【解決手段】追越車線判定手段によって、利用可能な追越車線108が有ると判定された場合に、利用可能な追越車線108が有ると判定されなかった場合に比して、移動体102を先行車と設定し難くするように設定条件を変更する設定条件変更手段を設ける。これにより、追越車線108を利用して追越し行うことができる場合に、移動体102を先行車と設定し難くする。そのため、運転者が自車両100より前方の移動体102を追い越す可能性が高いにも関わらず、不要に移動体102を先行車として設定することを防止する。
(もっと読む)
車両の走行制御装置
【課題】自車両の設定車速を走行環境に適した車速に変更することができる車両の走行制御装置を提供する。
【解決手段】車両の走行制御装置1は、ECU2と、対向車両の車速を検出するレーダセンサ3とを備えている。ECU2は、レーダセンサ3によって検出された対向車両の車速に基づいて、自車両の設定車速を決定し、その設定車速に応じてエンジン・AT制御ECU6及びブレーキ制御ECU7を制御することで車両の駆動・制動制御を行う。
(もっと読む)
車両の走行制御装置
【課題】走行ルールに違反した原因を調査可能な車両の走行制御装置を提供する。
【解決手段】車両に搭載され、当該車両の走行を制御する走行制御装置10であって、車両の周辺の走行ルールにしたがって車両の走行を制御する走行制御部35と、車両による走行ルールの違反を判定する違反判定部37と、違反判定部により走行ルールの違反が判定された場合に、走行制御部の制御内容を記憶する記憶処理部38と、を備える。
(もっと読む)
車両走行支援装置
【課題】対向車両の自車線への進入を妨げず、対向車線における円滑な交通の流れを確保することのできる車両走行支援装置を提供する。
【解決手段】自車両と先行車両との間の目標車間距離を取得する目標車間距離取得部12と、自車両に対する対向車両が自車線に進入するか否かを判定する進入判定部17と、進入判定部17により対向車両が自車線に進入すると判定された場合に、目標車間距離取得部12で取得した目標車間距離を修正する目標車間距離修正部21と、を備えることにより、先行車両M2との間で目標車間距離を取得しても、進入判定部17により対向車両M3が自車線へ進入すると判定された場合は、自車両M1が対向車両M3の自車線への進入の妨げとならないように、取得した目標車間距離を修正する。
(もっと読む)
走行制御装置及び車両
【課題】ドライバによる手動操作でも目標加減速度を容易に達成することができる走行制御装置を提供することを課題とする。
【解決手段】少なくとも車両の加減速を制御する走行制御装置であって、誘導目標加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを誘導目標加減速度外に対応するアクセル操作量又はブレーキ操作量のレンジより広く設定する加減速度特性設定手段を備えることを特徴とし、加減速度特性設定手段では、アクセル操作量と当該アクセル操作量に対応する加減速度との関係及びブレーキ操作量と当該ブレーキ操作量に対応する加減速度との関係を規定する基本マップBM1に対して、誘導目標加減速度を達成するための加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを広く設定したマップGM1を生成する。
(もっと読む)
車両の走行制御装置
【課題】設定された自動走行車速を維持するように加減速制御を行う場合に、自動走行車速が自動走行解除車速付近の速度である場合に、走行路が登坂路である場合でも、加減速制御を無用に中止させないようにする、車両の走行制御装置を提供する。
【解決手段】ACCセットSWの操作時の車速Vaが自動走行解除車速VX付近の車速Vm1〜Vm2であるか否か判定され、車速Vが減速しているか否か判定され、ACCセットSWの操作時に、前記両判定が肯定の場合に、自動走行車速VAとしてACCセットSWの操作時の車速Vaに所定速度Vαを加算した加算車速Va+Vαが設定される。
(もっと読む)
車両の走行制御装置
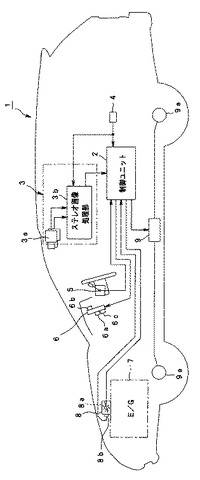
【課題】 運転者に対して最適なタイミングで車間距離の制御や衝突回避の制御を実施する。
【解決手段】 先々行車を検知するミリ波レーダ2を備え、運転者からの前方の視認状態の情報を入手する前方カメラ12を備え、ミリ波レーダ2により先々行車の存在が確認された時の前方カメラ12による前方の見え方に応じてエンジン4の出力制御の作動状況、ブレーキ5の効かせ方の状況、シートベルト6やサポート部材9による乗員の拘束状況の作動タイミングを調整し、運転者の目線でみた状態に基づいて、車間距離の制御や衝突回避の制御といった走行制御を的確に行なう。
(もっと読む)
車両の走行制御装置
【課題】設定された自動走行車速を維持するように加減速制御を行う場合に、自動走行車速が自動走行解除車速付近の速度である場合に、走行路が登坂路である場合でも、加減速制御を無用に中止させないようにする、車両の走行制御装置を提供する。
【解決手段】自動走行車速VAが自動走行解除車速VX1付近の車速Vm1〜Vm2であるか否か判定され、車速Vが減速しているか否か判定され、自動走行車速VAの設定時に、前記両判定が肯定の場合に、自動走行解除車速VX1が所定時間Tc無効にされる。
(もっと読む)
車両用走行制御装置
【課題】車速変動許容範囲を最適な範囲に変更することができる車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置は、車速を検出する車速センサ11と、目標車速を設定する復帰/加速スイッチ13およびセット/減速スイッチ14と、目標車速設定手段により設定された目標車速を含む車速変動許容範囲を設定する車速変動許容範囲設定手段と、車速変動許容範囲内において指示車速を算出する指示車速算出手段と、指示車速に基づいて車両の走行制御を行うスロットル開度制御部36と、乗員の操作により車速変動許容範囲を変更する上限車速変更スイッチ19および下限車速変更スイッチ20を備える。
(もっと読む)
作業車
【課題】本発明では、オートクルーズを設定して走行して解除し、再度オートクルーズ走行に戻った場合に安全に走行することを課題とする。
【解決手段】無段変速装置と第二有段変速装置及び第一有段変速装置を走行装置の動力伝動径路に設けた作業車において、前進走行中にオンすることでその時点における無段変速装置の変速位置と第二有段変速装置及び第一有段変速装置の変速段をオートクルーズ条件として記憶し、そのオートクルーズ条件を維持するように制御するオートクルーズスイッチと、オートクルーズ条件を解除した後にオンすると再度事前のオートクルーズ条件での走行に復帰するオートクルーズ復帰スイッチを設け、オートクルーズ復帰スイッチを操作してオートクルーズ速度への復帰は、前記第二有段変速装置及び第一有段変速装置の変速段が変更されていない条件でのみ行われるようにしたことを特徴とする作業車の構成とする。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において、先行車が存在するのに、一瞬、自車両が車線を逸脱しそうになるような状況で、先行車が存在しないという誤った判断をすることがなく、先行車への追従性が損なわれることはなくなり、これにより、追従性精度の向上に貢献することにある。
【解決手段】車線逸脱防止制御手段から、自車両の推定走行軌跡と走行レーンとの角度情報を出力し、角度情報が設定値以上ある場合で、且つレーダから出力される結果が、前回の結果が先行する車両有りで、今回の結果が先行する車両無しの場合でも、先行車両検出手段で先行車有りと出力している。
(もっと読む)
車両自動走行制御装置
【課題】実加速度が目標加速度に対して良好に追従しながら、車両を自動走行させることができる車両自動走行制御装置の提供。
【解決手段】フィードフォワード演算値及びフィードバック演算値の各演算値から目標要求トルクを求める目標要求トルク演算手段31と、その求めた目標要求トルクに基づいて車両を自動走行させるとともに、車両の何れかの車輪がスリップしたときに車輪のスリップを抑制するスリップ抑制制御を実行する自動走行制御手段Dとを備え、目標要求トルク演算手段31は、自動走行制御手段Dによってスリップ抑制制御が実行された場合、目標加速度と実加速度との偏差に基づくフィードバック演算値を保持し、その保持したフィードバック演算値及びフィードフォワード演算値の各演算値から目標要求トルクを求める。
(もっと読む)
車両用走行制御装置
【課題】車速制限制御と車間制御を同時に行い得る車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置1は、車両の走行速度を検出する車速センサ11と、乗員により設定された制限速度を記憶する記憶部17と、乗員のアクセル操作に関わらず走行速度が制限速度以下となるように車速制限制御を行う電子制御装置30と、車両に搭載され自車両の進行方向前方に存在する先行車両との車間距離および相対速度を検出するレーダ装置12と、車速センサ11の出力に基づいて制限車間距離を算出する制限車間距離算出部34と、レーダ装置12により検出された先行車両との車間距離が制限車間距離以下とならないように、車間距離が減少するにしたがって制限速度を減少させる制限速度を変更する制限速度変更部32と、を備える。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作があった場合に、車両を停止保持することができる車両走行制御装置を提供すること。
【解決手段】車両走行制御装置1では、自動走行制御ECU7において検出された勾配において車両を停止保持することができる勾配目標駆動力Foiおよび検出された車速Vが目標車速Voとなるように算出された基準駆動力から勾配目標駆動力Foiを引いた値であるフィードバック目標駆動力Fofを算出し、エンジンECU8に出力する。エンジンECU8は、算出された勾配目標駆動力Foiおよびフィードバック目標駆動力Fofの合計である目標駆動力Foに基づいてエンジン100を制御する。運転者による制動操作を検出した場合、自動走行制御ECU7が0以下のフィードバック目標駆動力FofをエンジンECU8に出力し、エンジンECU8が勾配目標駆動力Foi未満の目標駆動力Foに基づいてエンジン100を制御する。
(もっと読む)
車両走行制御装置
【課題】主走行状態検出手段に異常が発生することで、異常な目標制御量に基づいて車速調整装置が作動されることを抑制することができる車両走行制御装置を提供する。
【解決手段】車両走行制御装置1に、車輪速度センサ3の他に、車両の走行状態を検出する駆動系回転センサ7を設ける。また、エンジンECU9は、自動走行制御ECU8により自動走行制御を行っている際に、駆動系回転センサ7での検出結果に基づいて算出した車速Veが異常判定条件を満たした場合には、自動走行制御は行わずに、エンジン100の通常制御を行う。このように、エンジンECU9に、駆動系回転センサ7での検出結果に基づいた異常判定条件を設定することにより、車輪速度センサ3に発生した異常を検出することができる。この結果、車輪速度センサ3に異常が発生することで、異常な目標制御量に基づいてエンジン100が作動されることを抑制することができる。
(もっと読む)
車両走行制御装置
【課題】異常が発生することで、異常な目標制御量に基づいて車速調整装置が制御されることを抑制することができる車両走行制御装置を提供すること。
【解決手段】車両走行制御装置1−1では、自動走行制御ECU7において車速Vが予め設定された目標車速Voとなるように目標駆動力Foを算出し、エンジンECU8においてエンジンECU8に出力された目標駆動力Foに基づいてエンジン100を制御する。エンジンECU8は、運転者による制動操作を検出した場合、自動走行制御ECU7において予め設定された車速Vを低速目標車速Volとすることができる低速上限値FL2以下となるように算出された目標駆動力FoがエンジンECU8において予め設定された車速Vを低速目標車速Volとすることができる基準低速上限値FL2´を超えると判定する場合、目標駆動力Fo制御量に基づいた自動走行制御を行わない。
(もっと読む)
161 - 180 / 424
[ Back to top ]