
Fターム[3D246GB33]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351)
Fターム[3D246GB33]の下位に属するFターム
Fターム[3D246GB33]に分類される特許
141 - 150 / 150
車両の走行ダイナミクスを局所的および時間的に評価および予測するためのドライバアシスタンスシステム
本発明は、交通システム内で車両の走行ダイナミクスを局所的および時間的に評価および予測し、得られた情報を隣接する車両に伝送するためのドライバアシスタンスシステムに関する。本発明では、評価される車両において相互に依存せずに生成されたデータが評価ユニットに収集されて評価され、該データから直後の走行状況に関する予測が生成され、該走行状況は、該走行状況に関与する周辺の車両に伝送される。 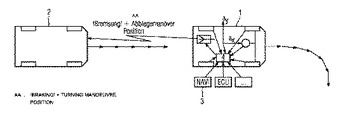 (もっと読む)
(もっと読む)
車両の駆動システム
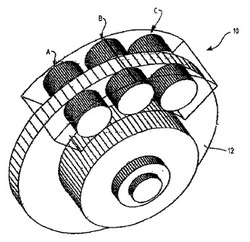
車両用電気駆動システム。前記駆動システムは、前記車両の少なくとも一つの車輪に電気モーターを含み、前記電気モーターは前記車両の前記車輪に関連するブレーキディスクの回転トルクを誘導するよう適合された電界源から構成される。他の形状では、車両の車輪にトルクを与える方法が提供され、前記車輪は機械的に関連するブレーキディスクロータを有し、前記方法は前記ロータをモーターロータとして利用し、それによって前記ロータはディスクブレーキおよびモーターロータの二重機能を実行する。 (もっと読む)
少なくとも1つの対象物検出センサを制御する方法および装置

車両のための少なくとも1つの対象物検出センサを制御する方法および装置であって、少なくとも1つのセンサは複数の駆動モードで切り替え可能であり、複数の機能が、対象物検出センサによって検出された対象物を評価するために、随意に少なくとも1つのセンサにアクセスすることが可能であり、駆動モードの切り替えが、センサに目下アクセスしている機能に従って選択される方法および装置において、関数評価装置と少なくとも1つのセンサの間に調整装置が設けられており、少なくとも1つのセンサにアクセスしている機能が、調整装置にその都度、重要性密度関数を伝達し、少なくとも1つのセンサが、作動可能な駆動モードのために、調整装置に検出確率密度関数を伝達し、調整装置が、少なくとも1つのセンサにアクセスしている機能のために、最も適切な駆動モードを選択することを特徴とする。 (もっと読む)
走行速度調整システムを装備した自動車の運転者を警告するための方法
本発明は、間隔に関連した走行速度調整システムが装備されている自動車の運転者を警告するための方法に関し、この方法では、間隔に関連した走行速度調整中、間隔に関連した走行速度調整システムにより生じさせられた制動モーメントを用いて自動車が停止状態に保持され、また自動車を離れるために運転者が自動車を離れること又は運転者の離れる意図が認識可能である。本発明に従い、運転者の離れることを認識した場合又は運転者の離れる意図を認識した場合、自動車が運転者にとって知覚可能な運動をこうむるように前記の生じさせられた制動モーメントが変更又は調節される。 (もっと読む)
車両におけるクラッチの制御方法及び装置
スロットル制御器(13)における変位が、予め設定されているスロットル制御器の徐行速度範囲内で留まるか、ブレーキ制御器(9)における変位が、予め設定されているブレーキ制御器の徐行速度範囲内で留まる限り、第1の車両徐行速度に対する第1の変位位置が前記範囲内のうち1つで選択され、スロットル制御器またはブレーキ制御器が前記第1の変位位置で実質的に留まる限り、制御ユニット(10,12,14,16)は、ブレーキアクチュエータ、エンジン及びクラッチアクチュエータのうち少なくとも1つを制御することにより前記第1の車両徐行速度を維持する車両におけるクラッチ(3)の制御方法及び装置である。 (もっと読む)
下り坂を運転する車両の制御システム
【課題】 傾斜が急な道路上で運転するときに、ブレーキ・ペダルを運転者が作動させているか否かには関係なく、追加の制動モーメントを調節する坂下り制御システムを提供する。
【解決手段】 自動車の制動機器における坂下り制御システムは、運転者の作動には関係なく、アンチ・ロッキング制御機能および制動機能の双方に合わせて設計されている電気制御可能サービス・ブレーキ・システムと、自動車の個々の車輪に対して発生し、坂下り制御によって制御するそれぞれの操作対象変数である、制動圧力または制動モーメントの個々の調節を可能にするブレーキ・アクチュエータと、自動車の動作状態に関する変数を直接的または間接的に検出し、ブレーキ・ペダルが作動されているか否かには関係なく、傾斜が急な道路上で運転するときに、追加の制動モーメントを調節する、電子制御および/または規制のために設けられている電子制御ユニットとを備えている。
(もっと読む)
リターダを有する車両の車速の制御及び/又は調整のための方法
リターダを有する車両の車速の制御及び/又は調整方法に関連して、リターダを接続すると、記憶された基準速度に対する走行速度の行過ぎが減少又は回避される。その場合記憶された基準速度に到達する前にリターダが接続され、このため記憶された基準速度に到達する前にリターダの制動作用が働き、車両の加速が減少又は最小化される。 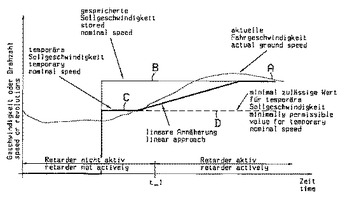 (もっと読む)
(もっと読む)
自動車両内の縦方向動特性制御システム
現在車両速度から出発して新たな目標車両速度が調節されるべき本発明に従う自動車両内の縦方向動特性制御システムでは、機能モジュールが設けられていて、この機能モジュールにより、目標車両速度の到達のために設定されている目標車輪モーメント経過曲線が検出され、この目標車輪モーメント経過曲線が少なくとも主部分で車両速度の逆数に比例して設定され、この目標車輪モーメント経過曲線が目標車輪モーメント経過曲線の実現のために可能な調節システムにて出力される。  (もっと読む)
(もっと読む)
車両用支援システム
本発明は、車両用支援システム、特にエレクトロニックラリーコパイロットシステム、追い越し支援システムまたは右折優先通行支援システムに関する。本発明によれば、支援システムは少なくとも1つの制御ユニットを有し、この制御ユニットが認識したドライバー設定に基づいていわゆるグローバルデータ、ローカルデータおよび内部データの3つのグループから少なくとも1つのデータを選択し、これに依存して車両の走行ダイナミクスに関する出力信号が形成されるようにこれらを相互に結合する。本発明はさらに、3つ(ドライバー設定を入れれば4つ)のグループによって形成されたデータを有利には同時に処理する支援システムに関する。これにより、特に有利には、安全性に関するアプリケーションにとって特に重要なリダンダンシーが達成される。したがって本発明はこんにちの車両のラリーコパイロットシステム、追い越し支援システムおよび/または右折優先通行支援システムに適している。 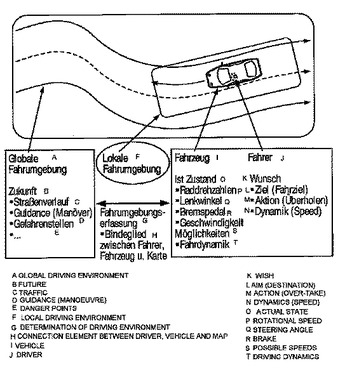 (もっと読む)
(もっと読む)
ブレーキ制御装置を有する二輪車両
ブレーキ制御装置を有する二輪車両の場合、このブレーキ制御装置ブレーキ制御装置は、車両速度又はこれから導き出された値、特に車両加速度を能動的に変更又は制限することによって運転者を能動的にアシストする手段を有する。  (もっと読む)
(もっと読む)
141 - 150 / 150
[ Back to top ]