
Fターム[3D246GB33]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351)
Fターム[3D246GB33]の下位に属するFターム
Fターム[3D246GB33]に分類される特許
41 - 60 / 150
車両の速度制御装置
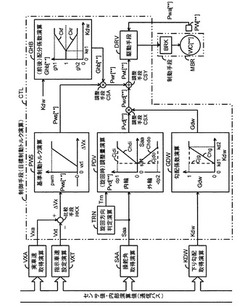
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両の速度制御装置

【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
運転支援装置、方法およびプログラム
【課題】制動力の大きさが過度に上昇することを抑制しながらエネルギーを回収する技術の提供。
【解決手段】車両の前方の目標位置および当該目標位置における目標車速を特定し、前記車両の減速を開始する減速開始位置と前記目標位置との間を複数の区間に分割し、前記減速開始位置と前記目標位置との間において車速を前記目標車速に減速させる回生ブレーキを発生させるためにバッテリに対して充電すべき目標充電電力を前記複数の区間を構成する各区間において異なる値に設定し、前記複数の区間を構成する各区間において前記車両に搭載された発電機を制御して前記バッテリに対して前記目標充電電力を充電する回生ブレーキを発生させる。
(もっと読む)
減速支援システム
【課題】車両の運転者の意図に沿った減速支援制御を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が交差点に進入することを検知する第1検知手段(109)と、車両が交差点に進入した際に、減速制御開始条件が成立したことを条件に、減速支援制御を行う第1減速支援手段(109)と、車両が交差点を右折又は左折するか否かを判定する右左折判定手段(109)とを備える。車両が交差点を右折又は左折すると判定された場合、第1減速支援手段は、車両の運転者が、車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めたタイミングで、減速支援制御を終了する。他方、車両が交差点を右折又は左折しないと判定された場合、第1減速支援手段は、運転者が、アクセルオフからアクセルオンにしたタイミングで、減速支援制御を終了する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】閉弁特性と開弁特性とが大きく異なる場合であっても、良好な減圧を実現することができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置の制御部は、調圧弁の上下流の差圧と、閉弁させるための出力電流値との関係を示す閉弁用マップMP2と、差圧と、開弁させるための出力電流値との関係を示す開弁用マップMP1とが記憶された記憶部を備え、調圧弁の開弁によって車輪ブレーキ内の液圧を減圧する場合には、閉弁用マップの出力電流値から開弁用マップの出力電流値に変更した後、閉弁用マップの出力電流値と開弁用マップの出力電流値との間の出力電流値に変更して、調圧弁に流す電流を制御する電流値切替制御を実行する。
(もっと読む)
車両システム、交通システム
【課題】車両の運転者に対して減速支援を行う際に、燃費向上効果を低減させることなく、走行時の安全性を確保する。
【解決手段】車両の走行速度が、車両が無停止で走行するための速度範囲内ではないと判断された場合には(S120:NO)、注意喚起を実行する必要があると判断し、減速支援を示す情報(車両が無停止で走行するための速度範囲)と注意喚起を示す情報(「後方注意」の文字)とをメータパネル本体21の表示領域21aに同時に表示させる(S125、S130)。このことにより、後方を走行する車両から急接近されないように運転者が注意して車両の減速を行うことができる。さらに、このような減速支援によってスムーズな減速が実行されることで、燃費向上効果が低減されない。したがって、車両の運転者に対して減速支援を行う際に、燃費向上効果を低減させることなく、走行時の安全性を確保することができる。
(もっと読む)
車両運動制御装置及び車両運動制御プログラム
【課題】簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を導出する。
【解決手段】記憶された自車両と目標位置との間の距離のx成分Xeとy成分Yeとの比で定めた第1のパラメータ、自車両の速度のx成分vx0とy成分vy0との比で定めた第2のパラメータ、及び目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を求めるために導入した第1の導入パラメータν1の関係を定めた第1のマップ、第1のパラメータ、第2のパラメータ、及び第2の導入パラメータν2の関係を定めた第2のマップ、並びに第1のパラメータ、第2のパラメータ、及び目標位置に到達する時刻teの関係を定めた第3のマップと、現在の自車両と目標位置との間の距離及び自車両の速度に基づいて演算された第1のパラメータ、第2のパラメータとを用いて車体合成力を導出する。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
走行制御装置
【課題】退出路の手前で退出の意図が検出されても減速を開始せず、退出路の先頭位置を通過してから減速を行う走行制御装置を提供する。
【解決手段】走行制御装置1は、本線110から退出路120への退出意図を検出し、車両2が退出路120の先頭位置123を通過したか否かを判断し、退出意図が検出されかつ車両2が退出路120の先頭位置123を通過したと判断された場合に車速制御部50により減速制御を行わせる。
(もっと読む)
走行支援装置
【課題】運転者の操作によって推奨速度への速度調整を容易に実施できる走行支援装置を提供することを課題とする。
【解決手段】運転者の操作に応じて自車両の速度を調整可能な自車速調整手段を備える車両に搭載される走行支援装置1であって、自車両の推奨速度を取得する推奨速度取得手段51と、自車両の速度を検出する自車速検出手段12,22と、推奨速度と自車両の速度との偏差に応じて自車速調整手段の操作特性を変更する操作特性変更手段51とを備えることを特徴とし、操作特性変更手段51は、推奨速度と自車両の速度との偏差が大きいほど、自車両の速度が推奨速度に一致する方向に速度変化し易くなるように自車速調整手段の操作特性を変更すると好適である。
(もっと読む)
運転支援装置及び運転支援方法
【課題】交差点Xに対する運転支援を、より適切なタイミングで実施可能な運転支援の技術を提供する。
【解決手段】自車両の進行方向前方に存在する交差点Xに対する運転者の支援を行う運転支援の技術である。自車両に掛かる走行抵抗βを推定し、上記推定する走行抵抗βと自車両の車速Vとに基づき、上記交差点Xに接近する際の運転者による加減速指示の操作を予測する。そして、自車両の進行方向前方に存在する交差点Xまでの距離Lと、上記予測した加減速指示の操作と、運転者による加減速指示の操作とに基づき、運転支援が必要と判定すると運転者の支援を行う。
(もっと読む)
車両制御装置、車両および車両制御方法
【課題】車両制御における運転者の違和感を抑制することができる車両制御装置、車両および車両制御方法を提案すること。
【解決手段】実相対距離Drに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対距離Dsを算出し、実相対速度Vrに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対速度Vsを算出し(ステップST2)、知覚相対距離Dsと知覚相対速度Vsとの比である知覚相対比Xを算出し(ステップST3)、知覚相対比Xがしきい値X0を越える場合に車両制御を行う(ステップST4,5)。知覚相対比X(知覚相対比Xが反映された制御値)に基づいて車両制御を行うので、車両制御における運転者の違和感を抑制することができる。
(もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、停止距離に応じて適正な速度パターンを生成し、燃費の向上を可能とする。
【解決手段】目標走行経路に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、
目標走行経路に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、速度パターンにおいて車両の減速を行う第1減速パターンを生成する第1減速パターン生成手段と、第1減速パターンの継続期間がより長くなるように速度パターンを修正する減速パターン修正手段とを設ける。
(もっと読む)
車両
【課題】車両において、最適な回生制動方法を選択しエネルギ効率を向上させる。
【解決手段】減速モードとして、ブレーキペダル操作により減速する第1の減速モードと、アクセルペダルおよびブレーキペダルの両者をオフした惰性走行状態により減速する第2の減速モードとを有する車両100であって、回転電機MG1,MG2と、蓄電装置16と、制御装置30とを備え、制御装置30は、車両100の運転状態および走行状態に基づいて、第1の減速モードにおける第1の回生電力と、第2の減速モードにおける第2の回生電力とを予測し、上記の第1および第2の回生電力の比較に基づいて、第1および第2の減速モードのいずれか一方の選択を促すように車両乗員に通知する。
(もっと読む)
車両用運転支援装置
【課題】所定以上の制動力が発生した場合に適切なタイミングでブレーキランプを点灯させることができる車両用運転支援装置を提供する。
【解決手段】PCU5は、自動制動制御による制御液圧が閾値以上である場合のみならず、マスタシリンダ液圧Pmが設定値P0以上である場合にも、リレースイッチ56を副配線55側にON接続し、ブレーキペダルスイッチ54に依存することなくブレーキランプ52を点灯させる。これにより、例えば、自動制動制御による液圧がマスタシリンダ27内に残留している状態でドライバがブレーキペダル25を操作した場合等のように、その残圧により、通常の踏み込み操作によってマスタシリンダ27内に発生する液圧よりも高い液圧が発生した場合においても、適切なタイミングでブレーキランプ52を点灯させることができる。
(もっと読む)
車速制御装置
【課題】車両の運転状態に応じて一定速走行を開始することのできる車速制御装置を提供する。
【解決手段】所定時間内における車両の速度Vが所定の車速の範囲内である場合に車速Vを一定に制御する車速制御装置において、所定時間内における車両の運転状態に応じた車速Vの変化幅が所定の変化幅ΔVよりも小さいことを判断する変化幅判断手段(ステップS3)と、所定時間内における車両に対し制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さいことを判断する制動力要求操作頻度判断手段(ステップS4)と、車両の速度の変化幅が所定の変化幅ΔVよりも小さく、かつ制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さく、かつ駆動力を発生させる駆動力要求操作がOFFになった場合に、車速が一定になるように制御を開始する一定速制御開始手段(ステップS9)とを備えている。
(もっと読む)
運転支援装置
【課題】運転者の走行形態に応じて、適切な運転支援を行うことができる運転支援装置を提供すること。
【解決手段】運転者の運転を支援する運転支援装置において、自車両が走行する道路の車線数が複数である場合、自車両の走行車線を取得する走行車線取得手段と、取得された走行車線に応じて、運転支援内容を決定する運転支援内容決定手段と、を備えることを特徴とする。
(もっと読む)
41 - 60 / 150
[ Back to top ]