
Fターム[3D246GB35]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351) | 追従走行 (78)
Fターム[3D246GB35]に分類される特許
1 - 20 / 78
先行車追従走行装置及び運転支援システム
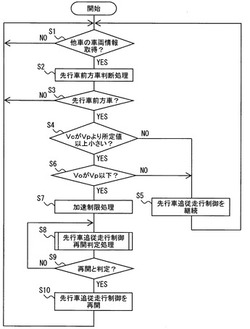
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
自動走行制御装置

【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
隊列走行制御装置
【課題】製造コストの増加を抑えつつ、先頭車両におけるフルブレーキ制動時の隊列走行の安定化を図ることができる隊列走行制御装置を提供することを目的としている。
【解決手段】手動又は自動運転される先頭車両1aに後続車両1bを自動追従させる隊列走行制御装置において、前走車両1aにおけるブレーキチャンバ32に加圧される最大エア圧よりも、自車両1bにおけるブレーキチャンバ32に加圧される最大エア圧を高い値に設定する調圧弁(比例制御弁)34aと、調圧弁34aを迂回するバイパス通路34eと、を備えたエアブレーキ手段(エアブレーキシステム)20a,20bと、隊列走行時、調圧弁34aを介してエアをブレーキチャンバ32に供給し、非隊列走行時、バイパス通路34eを介してエアをブレーキチャンバ32に供給するように切り替える隊列走行制御手段(統合コントローラ)10と、を備えた。
(もっと読む)
先行車追従走行装置
【課題】燃費の悪化が抑制でき、且つ、先行車に対する追従性も良好な先行車追従走行装置を提供する。
【解決手段】先行車追従制御において、摩擦ブレーキ開始閾値式(L1)、エンジンブレーキ開始閾値式(L2)、加速制御終了閾値式(L3)を用いて、摩擦ブレーキ開始閾値、エンジンブレーキ開始閾値、加速制御終了閾値を逐次算出する。そして、エンジンブレーキ開始閾値と加速制御終了閾値の間を等速領域とし、KdB_cの現在値が等速領域にあれば等速制御を行う。等速制御を行うことができる結果、加減速の頻度が低下するので、燃費の悪化が抑制できる。また、減速の頻度が少なくなることにより、割り込み車が加速した場合や、先行車が減速後、再加速した場合に、先行車に追従するための加速が少なくて済むので、追従性も良好となる。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
ブレーキ制御装置
【課題】メンテナンスの作業効率を向上し得るブレーキ制御装置を提供する。
【解決手段】ブレーキ制御に係る制御原点のキャリブレーション時、制御原点調整指示信号によって、マスタ圧制御装置のCPUの検出手段が作動されて検出した制御原点が不揮発性メモリとバッファメモリとに記憶されて、且つセレクタ手段302の読み出し選択がバッファメモリ側に設定されるので、キャリブレーションによる新制御原点がリアルタイムにブレーキ制御アプリケーション303にて適用可能となる。これにより、従来のように、イグニッションスイッチをオフ・オン操作して再起動するまでの時間を待つ必要がないので、メンテナンスの作業効率を向上させることができる。
(もっと読む)
ブレーキ装置
【課題】電動アクチュエータでピストンを駆動してマスタシリンダで液圧を発生させるブレーキ装置において、ピストンの制御原点を精度よく適切に設定する。
【解決手段】ブレーキペダルBの操作による入力ピストン32の移動に対して、電動モータ40によってプライマリピストン10を駆動してマスタシリンダ2のプライマリ室16に液圧を発生させ、ブレーキ液をブレーキキャリパ71に供給して制動を行なう。非制動時のプライマリピストン10の保持位置として、プライマリ室16がリザーバ5から遮断される第1制御原点と、プライマリ室16がリザーバ5に連通される第2制御原点との2つを設定し、これらを適宜切換えることにより、ブレーキの応答性を改善しつつ、ブレーキの引き摺りを防止する。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
ヨーレートのずれ検出装置
【課題】ヨーレートセンサにより検出されたヨーレート検出値のずれを正確に検出する。
【解決手段】自車両のヨーレートを検出するヨーレートセンサ30と、自車両の前方の物体を検知する前方物体検知センサ31と、前方物体検知センサ31により検知された物体が固定物であるのかを認識する前方物体認識部10と、前方物体認識部10により認識された固定物が自車両に対してその横方向に相対的に移動する横移動量を測定する横移動量測定部12と、横移動量測定部12により測定された横移動量に基づいて、自車両のヨーレートを推定するヨーレート推定部13と、ヨーレートセンサ30により検出されたヨーレート検出値の、ヨーレート推定部13により推定された推定ヨーレート値からのずれを検出するずれ検出部14とを設ける。
(もっと読む)
車両制御装置
【課題】より適切な自車の減速を行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御において先行車100が減速した際に、先行車100の減速前の先行車100と自車1との車間時間が経過するまでに、取得した走行情報における先行車100の減速度と同じ大きさの減速度を自車1に発生させる。これにより、先行車100の減速中に先行車100に追突することなく、自車1を減速させることができる。また、車間時間が経過するまでに先行車100の減速度と同じ大きさの減速度を自車1に発生させることによって減速を行うので、必要以上に減速を行わないので、自車1の後方に他の車両が走行している場合でも、後続車に対する影響を低減することができる。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
車両制御装置
【課題】先行車と自車との相対的な制動応答特性の差異に関わらず、追従走行制御時に適切に自車を減速させることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて自車1の走行状態を制御する通信追従走行制御ECU40と、先行車100の減速ジャーク情報を取得する先行車走行情報取得部45と、通信追従走行制御ECU40が先行車100の減速に応じて自車1を減速させるタイミングを先行車100の減速ジャーク情報に基づいて変化させる減速度算出部33と、を備える。
(もっと読む)
車両速度制御装置および車両速度制御方法
【課題】 ドライバの速度制御への介入が容易であり、利便性の向上を図ることができる車両速度制御装置および車両速度制御方法を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、ドライバのブレーキ操作状態を検出するマスタシリンダ圧センサ104と、自車両と先行車両との距離を検出するカメラ107と、自車両の走行速度を制御するエンジン112およびブレーキ装置(ブレーキ液圧ユニット101,ブレーキECU102)と、カメラ107により検出された先行車との距離Dcaが速度制御許可範囲内で、かつ、アクセル開度センサ110とマスタシリンダ圧センサ104により検出された操作状態があらかじめ設定された所定の状態の場合、自車両と先行車との相対関係を維持するように速度制御部(エンジン112およびブレーキ装置)を作動させるブレーキECU102と、を備えた。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した軌跡になるよう操舵輪の舵角及び左右輪の前後力差を制御する。
【解決手段】運転者の操舵操作量に対する前輪の舵角の関係を変更する舵角可変装置14又はバイワイヤ式の操舵装置76を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための前輪の目標舵角を演算し(S500)、一方の後輪の目標付加制動力を演算する(S1050)。そして目標舵角に基づいて前輪の舵角を制御し(S600)、目標付加制動力に基づいて後輪の制動力を制御する(S1060〜1100)。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両の制動制御装置
【課題】 制動装置に故障が生じたときに、ドライバが制動装置の故障を認識していない場合であっても、車両が動き出すことを防止することができる制動制御装置を提供する。
【解決手段】 ブレーキECU1は、ブレー故障センサ6からブレーキ故障信号を受信した際に、警報装置8に警報信号を送信するとともに、パワートレインECU2にブレーキ異常信号を送信する。パワートレインECU2は、ブレーキ異常信号を受信した場合に、パワートレイン5におけるクラッチ12を開放する。また、車両が走行する道路の路面勾配が上り勾配である場合には、クラッチ12を係合する。
(もっと読む)
走行制御装置
【課題】自車両の前方に加速や減速が必要となる走行環境がある場合におけるドライバの操作負担を軽減することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず自車両の前方に加速が必要となる走行環境があるかどうかを判断し、加速が必要となる走行環境がないときは、アクセルをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御し、加速が必要となる走行環境があるときは、自車両を所定の加速度で加速させるように制御する。そして、走行制御装置は、ブレーキがON操作されると、自車両の加速動作を解除するように制御し、その後ブレーキをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御する。
(もっと読む)
車群走行制御装置
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
1 - 20 / 78
[ Back to top ]