
Fターム[3D246GB33]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351)
Fターム[3D246GB33]の下位に属するFターム
Fターム[3D246GB33]に分類される特許
81 - 100 / 150
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
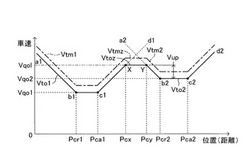
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
ナビ協調走行制御装置

【課題】
分岐路に進入してからの減速において、(1)進路の推定、(2)アナウンス、(3)運転者の応答確認、(4)減速、のステップを踏んでいたのでは、時間的に減速が間に合わない。
【解決手段】
本走行制御装置は、分岐路を認識する認識部と、自車と分岐路までの距離を算出する算出部と、当該距離が所定値以下となった場合に減速を開始する減速部と、運転者に拒否応答があるか否かを検出する検出部を備え、減速部は、減速開始後、検出部が拒否応答を検出した場合は減速動作を中止し、検出部が拒否応答を検出しない場合は減速動作を続行する。分岐路は、交差点,高速道路出口,サービスエリア入り口,高速道路分岐路を含む。算出部は、ナビゲーション装置の情報に基づいて、距離を算出してもよい。検出部は、アクセルの操作量に基づいて、拒否応答があるか否かを検出してもよい。
(もっと読む)
制動制御装置
【課題】液圧制御性能を低下させることなく、比例電磁弁の駆動周波数で発生する作動音の低減を行うことが可能な制動制御装置を提供する。
【解決手段】設定された駆動周波数により駆動される比例電磁弁の開度に応じて液圧を調圧し、当該調圧した液圧に基づき制動力を制御する制動制御装置1は、要求される制動力に応じて液圧を調圧する際に要求される調圧精度に基づいて要求調圧精度指数を設定する要求調圧精度指数設定手段と、比例電磁弁を駆動する駆動周波数に起因する作動音の低減要求に基づいて要求作動音低減指数を設定する要求作動音低減指数設定手段と、設定された要求調圧精度指数及び要求作動音低減指数に基づいて比例電磁弁の駆動周波数を設定する駆動周波数設定手段14と、を備える。
(もっと読む)
液圧ブレーキユニットと液圧ブレーキユニットの制御方法
【課題】迅速かつ容易に失陥有無を判断し、液圧媒体の漏れによる枯渇を抑制する液圧ブレーキユニットと液圧ブレーキユニットの制御方法とする。
【解決手段】リザーバから供給された液圧媒体を加圧し、ブレーキ操作量に応じた液圧を生成するマニュアル液圧供給部と、マニュアル液圧供給部と第一のホイールシリンダとの間を連通する第一液圧系統と、マニュアル液圧供給部と第二のホイールシリンダとの間を連通する第二液圧系統と、第一液圧系統と第二液圧系統との間を連通する主流路に設けられた分離弁と、分離弁を開閉制御する分離弁制御部と、リザーバに貯留された液圧媒体が所定量より少ないか否かを検出する液圧媒体量検出部と、を有するブレーキECUとを備える液圧ブレーキユニットであって、分離弁制御部は、液圧媒体量検出部が、液圧媒体が所定量より少ないことを検出した場合に、分離弁を閉状態とする液圧ブレーキユニットとする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】所定区間において自車両を目標車速で定速走行させるための変速比に設定することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間において前記自車両を前記目標車速で定速走行させるために前記所定区間において維持すべき変速比である目標変速比を取得し、前記所定区間を前記目標車速で定速走行させるために前記自車両を前記目標車速とすべき目標地点に到達する前に前記自車両の変速比を前記目標変速比に設定させ、前記目標地点において前記自車両の車速が前記目標車速となるように前記自車両の車速を変化させる。
(もっと読む)
車両用速度制御システム
本発明は、予め設定された目標速度域内で燃費を指向しながら車速を制御するための、燃費指向の速度制御モードを起動するための操作ユニットと、前記燃費指向の速度制御が起動状態にあるときに、予め設定された最大エネルギ消費値に配慮しながら、前記予め設定された目標速度域内で車速を制御するようになっている、制御ユニットとを備えた、車両用の速度制御システムに関する。その際に車速は、前記予め設定された目標速度域内に位置する車速に調整することが可能である限りは、前記予め設定された最大エネルギ消費値を上回ることがないように、前記予め設定された最大エネルギ消費値に配慮しながら制御される。 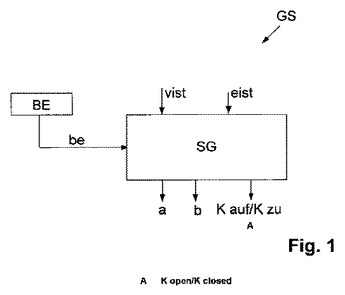 (もっと読む)
(もっと読む)
ブレーキ制御装置
【課題】 ポンプの吐出圧の脈動を低減し、良好なペダルフィーリングを実現できるブレーキ制御装置を提供すること。
【解決手段】 車両の状態に応じて、吸入路30から吸入したブレーキ液を吐出路24に吐出してブレーキ制御を行うポンプ12を備えたブレーキ制御装置において、吐出路24に吐出側へのブレーキ液の流れのみを許容するチェック弁16を設け、チェック弁16とポンプ12の吐出部との間と吸入路30を連通する連通路22を設けるとともに、連通路22にポンプ負荷制御弁11を設けた。
(もっと読む)
降坂路走行速度制御装置および降坂路走行速度制御方法
【課題】 運転者の所望する車速と実際の車速との乖離を抑制できる降坂路走行速度制御装置および降坂路走行速度制御方法を提供する。
【解決手段】 降坂路走行中の車両を目標車速V*に基づいて自動制動しつつ、アクセル操作に応じて車速Vを上昇させるHDCコントローラ1と、アクセル操作に応じて目標車速V*を変更する目標車速演算部23と、を有する降坂路走行速度制御装置において、HDCコントローラ1は、運転者がアクセルを踏み戻している間、踏み戻し直前の車速Vを維持する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自動で減速を行うための制御を実施している過程にて当該自動制御を中止した場合であっても安定した走行を行わせること。
【解決手段】自車両の制御状態が自動制御に設定されている場合に、前記自車両の減速量を制御して前記自車両の車速を所定の目標車速まで減速させ、前記減速量を所定の基準に対応した変化量で変化させて前記自動制御から前記手動制御へ移行させる。
(もっと読む)
降坂路走行速度制御装置
【課題】 空走距離の短縮化を図りつつ、自動制動誤介入時の違和感を小さく抑えることができる降坂路走行速度制御装置を提供する。
【解決手段】 降坂路の路面勾配変化量である斜度変化量Δθを検出する入力処理部21を備え、HDCコントローラ1は、斜度θが固定パラメータθ2よりも小さい場合であって、斜度変化量Δθが変動パラメータθ1'以上のとき、車両を自動制動する。
(もっと読む)
車両用減速制御装置及びその方法
【課題】分岐点でのカーブの状態に適合させて、減速制御を実施する。
【解決手段】車両用減速制御装置は、ナビゲーション装置14で地図情報の作成に使用するノード点を複数個用いて、車両前方の走行路の旋回半径を算出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が算出した旋回半径を基に、自車両を減速制御する制駆動力コントロールユニット8と、分岐点判定部61が自車両が走行する走路が分岐路であると判断したとき、該分岐路の所定範囲内のノード点の密度が小さくなるほど、減速制御のための目標減速度の抑制度合いを大きく補正する目標車速補正部62と、を備える。
(もっと読む)
車両用ブレーキ制御装置
【課題】回生効率の向上を図れ、かつ、ペダルフィーリングの違和感を抑制できる車両用ブレーキ制御装置を提供する。
【解決手段】M/C13内とマスタリザーバ13eとを接続する通路を第1通路13f、13gだけでなく、第1通路13fよりもセカンダリ室13d側に位置する第2通路13hも備えた構成とする。これにより、制動時に第2通路13hが塞がれるまではM/C圧が発生しないようにでき、回生効率の向上を図ることが可能となる。また、回生制動力の増減分を液圧制動力によって補償する際にもM/C圧が変動しないため、ペダルフィーリングの違和感を抑制することが可能となる。
(もっと読む)
車両の走行制御装置
【課題】複数の制御モードを有する車両挙動制御に対し、クルーズ制御において、演算を複雑にすることなく車両挙動制御で選択された車両挙動特性に適合する出力特性を得ることができ、良好なドライバビリティを得る。
【解決手段】車両挙動制御部1は、ABS制御と横滑り防止制御とトラクション制御の全てを実行する通常モードと、ABS制御と制限した横滑り防止制御とトラクション制御を実行するトラクションモードと、ABS制御のみを実行するOFFモードの3つのモードが設定されており、モード切換スイッチ14でドライバにより選択される。一方、クルーズ制御部2には、モード切換スイッチ14に応じたそれぞれのモードに対応する上限ガード値が設定されており、クルーズ制御時は、この上限ガード値で目標車速を制限することで、通常運転時の車両挙動制御のモードに適合する出力特性を設定する。
(もっと読む)
車両の制御装置
【課題】クロール制御を実行する車両に異常が発生した場合であっても、ドライバビリティの悪化を抑制しつつ適切に車両を制御することのできる制御装置を提供することにある。
【解決手段】車両1は、同車両1の駆動力と制動力とを制御して速度を所定の低速範囲に維持するクロール制御を実行する。車両1は、何らかの異常の発生が検知されたときに、既にクロール制御の実行中である場合には、機関10の出力を所定出力以下に制限するフェイルセーフ処理の実行を制限する。
(もっと読む)
ブレーキ制御装置およびその制御方法
【課題】 ホイルシリンダ圧のハンチングを回避したブレーキ制御装置を提供する。
【解決手段】 マスタシリンダ圧に、アクティブ制御開始閾値と、このアクティブ制御開始閾値よりも大きいアクティブ制御終了閾値を設け、コントロールユニットは、マスタシリンダ圧がアクティブ制御開始閾値を下回った場合、前記アクティブ制御モードを開始し、マスタシリンダ圧がアクティブ制御終了閾値を超えた場合、アクティブ制御モードを終了することとした。
(もっと読む)
列車制御装置
【課題】ブレーキ力のばらつきが大きい場合にも、減速度推定の誤差を小さくして、列車を所定時刻に、所定位置に正確に停止させる。
【解決手段】緩解後の再減速開始時などに、一定時間、所定のブレーキをかけて、列車9を減速させながら、減速度を推定した後、推定結果に応じたノッチ指示(自動ブレーキ力指令)をブレーキ制御器12に供給して、ブレーキ装置13を動作させ、列車9を指定された時刻、指定された位置に停止させる。
(もっと読む)
車輪速度演算装置
【課題】車輪速度センサから出力されるパルス信号のエッジに基づいて、車輪速度を演算する車輪速度演算装置において、エッジが未検出である場合に、実際の車輪速度の変化を反映させつつ、そのエッジが未検出である間の車輪速度を推定することができる車輪速演算装置を提供すること。
【解決手段】車輪の推定移動距離Dnに基づいて、エッジが未検出である期間における車輪速度を推定する。この車輪の推定移動距離Dnは、エッジが検出された時点の車輪速度におけるトレンドの変化線の傾きAnを考慮して推定されるので、実際の走行に近い状態で距離を推定できる。そして、この推定移動距離Dnを用いて、次のエッジが検出されるタイミングを予測し、そのタイミングを考慮して、エッジが未検出である期間における車輪速度を推定すれば、その推定に、実際の車輪速度の変化を反映させることができる。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
生体情報生成装置、生体情報管理システム、車両制御装置
【課題】生体情報を生成可能な装置において、使用者一人一人の状況に応じた生体情報を生成すること。
【解決手段】生体情報生成処理では、医療情報を取得し(S130:YES)、その医療情報中の治療予定時刻に基づいて、治療予定時刻の前後の一定時間内での計測間隔が短い間隔となるように計測タイミングを設定する(S140)。そして、計測タイミングとなると、全種類の生体信号を計測して(S170)、それらの計測された生体信号それぞれ、及び血圧、心拍数を生体情報として生成し(S190)、今回の生体情報と前回の生体情報との差分(即ち、生体情報変化量)を算出する(S200)。その算出した生体情報変化量に基づいて、運転者の体調(S220)や治療内容が実行されたか否か(S270)を判定し、生体情報と体調判定結果と治療実行判定結果とを送信情報として医療機関設置装置群60に送信する(S300)。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】コンプライアンスステアによるトー角変化を抑制して、自車両の走行車線からの逸脱を防止するために必要な目標ヨーモーメントを適切に得る。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向を判定する車線逸脱傾向判定手段(ステップS3、ステップS4)と、車線逸脱傾向判定手段が逸脱傾向があると判定した場合に、車輪の制動力を制御して、左右輪に制動力差を発生させることで車両にヨーモーメントを付与する制動力制御手段(ステップS13、ステップS14)と、車輪に制動力を発生させる際に生じるコンプライアンスステアによるトー角変化を基に、制動力制御手段が車輪に発生させる制動力を補正するコンプライアンスステア用補正手段(ステップS10)と、を備える。
(もっと読む)
81 - 100 / 150
[ Back to top ]