
Fターム[3D246GB33]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351)
Fターム[3D246GB33]の下位に属するFターム
Fターム[3D246GB33]に分類される特許
21 - 40 / 150
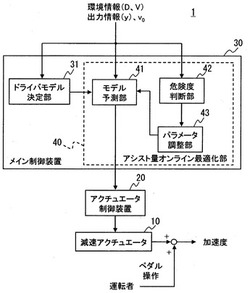
状況適合型運転支援装置
【課題】様々な走行状況に適合した最適な運転支援を行うことができる状況適合型運転支援装置を提供する。
【解決手段】モデルを予測しつつアシスト量最適化問題を逐次解くことにより、最適アシスト量を逐次決定するモデル予測部41と、そのモデル予測部41が決定した最適アシスト量に基づいて、減速アクチュエータ10の制御を行うアクチュエータ制御装置20とを備え、さらに、車両の危険度を判断する危険度判断部42と、その危険度判断部42が判断した危険度に応じて、アシスト量最適化問題に含まれるパラメータを調整するパラメータ調整部43を備える。モデル予測部41は、パラメータ調整部43が調整したパラメータを用いて最適アシスト量を逐次決定する。
(もっと読む)
走行制御装置

【課題】車速制御中にドライバーによりブレーキペダルのペダル操作が行われたときに、ドライバーに違和感を与えることなく、車速制御を解除することができる走行制御装置を得ること。
【解決手段】車速制御手段により車速を減速させる制御中にドライバーによりブレーキペダル112のペダル操作が行われた場合に、ペダル操作によりマスタシリンダ111で発生されるドライバーブレーキ液圧Pdと、車速制御部131の減速度指令値Aに基づいてブレーキアクチュエータ121で発生されるアクチュエータブレーキ液圧Paとを比較して、ドライバーブレーキ液圧Pdがアクチュエータブレーキ液圧Paを上回るまで、車速制御部131からの減速指令値Aの出力を継続する。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作に基づき車両のエンジンを自動的に停止させる機能を有する車両において、制動制御を阻害することなくエンジンを速やかに再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に制動力が付与されない状態で走行する場合における車両の加速度の推定値として惰性加速度Dgを取得し(ステップS27)、該惰性加速度Dgに基づき第1車速推定値VS1を取得し(ステップS28)、取得した第1車速推定値VS1が制動制御許可基準値KVS未満である場合に(ステップS29:YES)、エンジンの再始動を許可する(ステップS30)。
(もっと読む)
運転支援システム
【課題】車体速度を所望の速度に維持するよう制御する車速制御が不意に解除されてしまうことを防ぐこと。
【解決手段】アクセルペダルの操作量が増加した後に、ユーザが車速制御の開始を所望すると判定するために予め設定された「車速制御開始範囲」内となった場合には開始指示をエンジンECU2へ出力する。車速制御の実行中に、アクセルペダルの操作量が、ユーザが車速制御の継続を所望すると判定するために予め設定された、車速制御開始範囲を包含する「車速制御継続範囲」内にある場合には解除指示をエンジンECU2へ出力せず、一方、アクセルペダルの操作量が車速制御継続範囲内にはなくなった場合には解除指示をエンジンECU2へ出力する。車速制御継続範囲が車速制御開始範囲を包含するので、何らかの要因でアクセルペダルの操作量が変化しても、操作量が車速制御継続範囲にある限りにおいては車速制御が解除されない。
(もっと読む)
車両制御装置
【課題】 運転者に与える違和感を抑制することができる車両制御装置を提供すること。
【解決手段】 車両に搭載され、前記車両の走行中の道路形状を認識する道路形状認識手段と、前記道路形状認識手段により走行路の前方にカーブが認識されたときに前記カーブに基づいて算出された目標速度になるようにアクチュエータを駆動し減速制御を行う速度制御手段と、前記車両の直進状態を判定する直進状態判定手段と、を設け、前記速度制御手段は、前記直進状態判定手段によって直進状態判定後に前記減速制御を行うようにした。
(もっと読む)
先行車検知装置
【課題】最適車間維持装置において、隣接車線を走行する車両を先行車両とする誤認識を減少させる。
【解決手段】ECU5は車速センサ2が検出する車速と回転角速度3が検出するヨーレートから算出する車両1の予想進路と、物体検知センサ4が検出し、前方車両判別手段が判別した前方車両との距離を算出し、判定距離設定手段が設定した先行車判定の判定距離と比較する。判定距離は物体検知センサ4が検出した前方車両と車両1との相対速度から算出し、車両1からの相対速度の増加に応じて短く設定することで車両1から高速で離間する前方車両を先行車の判定から除外する。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
車両走行制御方法
【課題】走行中の車両の有する運動エネルギーを最大限に活用した車両走行制御方法。
【解決手段】車両走行区間を、起点および終点を各々信号交差点あるいは一時停止点とする単位走行制御区間に分割する。前記単位走行制御区間毎に、起点からの加速走行・定速走行を行いその後の終点に向けての走行は終点到達条件を満足する範囲内で前記加速走行・定速走行後に車両の有している運動エネルギーを最大限有効利用した惰性走行を行う。また、前記惰性走行時の車両の惰性走行減速度は、惰性走行中の一定時間あるいは一定走行距離毎に算出し以降それが更新されるまでの間の惰性走行可否の判定に利用する。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
運転支援装置
【課題】複数の死角が存在する場合に安全運転支援制御を行うときの運転者に対する不快感を軽減する運転支援装置を提供することを課題とする。
【解決手段】車両からの死角に対して安全運転支援制御を行う運転支援装置であって、車両の周辺環境を認識する周辺環境認識手段と、その認識した周辺環境に基づいて車両からの死角を検出する死角検出手段と、死角検出手段での検出結果に基づいて第1条件を満たした場合に死角に対する安全運転支援制御を稼動させる制御稼動手段と、安全運転支援制御を稼動した後に、死角検出手段での検出結果に基づいて第1条件とは異なる第2条件を満たさない場合に安全運転支援制御を停止させる制御停止手段を備えることを特徴とする。
(もっと読む)
ブレーキ力制御装置
【課題】逆入力に起因する増圧リニア制御弁の制御ハンチングの防止を図る。
【解決手段】ブレーキシリンダ液圧の変動が、ブレーキディスクの磨耗、ドラムの偏心に起因して生じる場合には、増圧リニア制御弁、減圧リニア制御弁への供給電流を抑制しても、ブレーキシリンダ液圧の変動は抑制されないことが多い。この場合に、不感帯幅を大きくすれば、増圧リニア制御弁、減圧リニア制御弁の作動間隔を長くすることができ、制御ハンチングを防止することができる。また、ブレーキシリンダ液圧の変動の状態を検出しつつ、不感帯幅を漸増させれば、不感帯幅を適正な大きさに変更することができる。
(もっと読む)
車両制御装置
【課題】車速制御中にドライバがブレーキ操作を行ったときに受ける違和感を防止する車両制御装置を提供することを課題とする。
【解決手段】自車両の車速を制御する車両制御装置であって、自車両のドライバのブレーキ操作を検出するブレーキ操作検出手段と、車速制御中に自車両のドライバがブレーキ操作を行ったときに当該ブレーキ操作における踏力が閾値以下の場合に車速制御の解除を禁止し、通常の車速制御とは異なるブレーキ操作時の車速制御に切り替え、自車両のドライバがブレーキ操作を終了した場合にブレーキ操作時の車速制御から通常の車速制御に切り替える制御切替手段を備えることを特徴とする。
(もっと読む)
ブレーキシステム
【課題】ブレーキシステムの改良を図る。
【解決手段】電気系の異常時には、マスタシリンダ62の液圧により増圧機構100が作動させられ、サーボ圧が、左右前輪2,4のブレーキシリンダ42に供給される。それに対して、液漏れの可能性が有ると検出された場合には、前後遮断弁330,左右遮断弁332が閉状態とされる。その結果、いずれかのブレーキ系統に液漏れが検出されても、他のブレーキ系統に、その影響が及ぶことを回避することができる。一方、左右遮断弁332,前後遮断弁330は、常開の電磁開閉弁であるため、液圧ブレーキ40,50の非作用状態である場合等の開許可条件が満たされる間は、開状態とされる。それにより、消費電力の低減を図り、かつ、ソレノイドの発熱を抑制することができる。
(もっと読む)
車両制御装置
【課題】勾配センサを用いずに、傾斜路における燃料カットハンチングを抑制することができる車両制御装置を提供する。
【解決手段】車両制御装置は、走行中の道路においてクルーズコントロールで要求される走行状態に自車を制御するための自車のエンジントルクTEを算出する(S109,S111)と共に、燃料カットを行わない時における前記自車の最小出力のエンジントルクTMINと、燃料カット時における前記自車のエンジントルクTFCと、を算出する(S115)。そして、TFC<TE<TMINの関係が成立する場合に(S117)、前記自車のエンジンの燃料カットを禁止する(S119)。
(もっと読む)
運転アシストシステム
【課題】、効率的な運転アシストを行うことが可能な運転アシストシステムを提供する。
【解決手段】本発明の運転アシストシステムは、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段(ステップS205)と、少なくとも前記第1評価関数を含む累積評価関数を算出する累積評価関数算出手段(ステップS206)と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作(ステップS209)を行う運転アシスト手段と、を有することを特徴とする。
(もっと読む)
距離制御システムに適切な、制動装置用電子制御装置
【解決手段】
この発明は、圧力制御器を有する電子制御装置に関し、それによって圧力を制御するための電磁弁は、電子制御システム経由電流で制御される。さらに、圧力増加アセンブリ(1、1´)は、圧力要求に依存して制御され、このアセンブリは、そのアセンブリの出口で周期的に変動する振幅を備えた体積流量を生成する。車両を安定化するために少なくとも非安全性限界関係を実行する制御における能動的な圧力増加の間に、車輪制動回路分離弁(2、2´)は、アセンブリによって増加したその圧力が調節されるべき圧力よりも高い場合には、対応する車輪制動回路から、計測された方法で近隣の体積内に入れ代る体積の一部を排出する。分離弁(2、2´)を作動するための電気コイル電流は、周期的に変調され、さらにその変調の周期は、アセンブリによって引き起こされる体積または圧力変動の主要周期に対応する。分離弁(2、2´)の周期的な制御は、制御装置が車両を安定するために安全性重大関係(safety critical engagement)を実行しなければならない場合には、安全性重大制御が、アンチロック制御および車両動力学制御を有することを条件として、少なくともその後、終了してしまう。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車速制御装置
【課題】ACC制御に依存しすぎないようにするために行われるドライバに対する注意喚起を、当該ドライバの状態に応じて促すことができる車速制御装置を提供する。
【解決手段】本発明の車速制御装置は、車両前方の移動体に電磁波を照射し、当該移動体から反射された反射波を受信することにより上記移動体の移動に関する情報をターゲット情報として算出するターゲット情報算出手段と、上記車両の運転者の顔を撮像し、当該撮像された画像を用いて上記運転者の顔に関する情報を顔情報として算出する顔情報算出手段と、上記ターゲット情報に基づいて上記車両の車速を制御する車速制御手段と、上記車速制御手段によって上記車両が停止するときに上記運転者に対して警告動作を行う警告手段と、上記警告手段が行う上記警告動作の態様を上記顔情報に基づいて変化させる警報変更手段とを備える。
(もっと読む)
車両
【課題】通知システム及び減速支援システムの両方を運転者の期待通りに作動させる。
【解決手段】車両(1)は、所定の通知条件が成立したことを条件に、信号機の灯色が赤である期間の残り時間を通知する通知システム(10)と、所定の減速支援条件が成立したことを条件に、車速が低下するように所定の減速制御を行う減速支援システム(20)と、を備える。車両は、所定の減速支援条件が成立した場合に、所定の通知条件を緩和する条件緩和手段(109)を備える。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定し、車両旋回状態にて各車輪の不要な前後スリップの発生を抑制しつつ小回り性を向上し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の基準位置(点O)が決定され、この基準位置から車両に近い側に車両の旋回中心(点P)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωptが演算される。この目標角速度と、旋回中心からの各車輪の距離Rpw[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され且つ小回り性が向上するように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づく。
(もっと読む)
21 - 40 / 150
[ Back to top ]