
Fターム[3D246GB33]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351)
Fターム[3D246GB33]の下位に属するFターム
Fターム[3D246GB33]に分類される特許
101 - 120 / 150
車両用減速制御装置

【課題】交差点手前での減速制御を運転者の運転感覚に合致させる。
【解決手段】車両用減速制御装置は、交差点位置情報を含む地図データを格納する地図データ記憶部3と、地図データ記憶部3が格納する地図データの交差点位置情報に基づいて、自車両の運転者による交差点手前での交差道路に対する視野角を推定する見通し推定部11と、見通し推定部11が推定した視野角に基づいて、交差点手前で自車両を減速させる減速曲線を作成する減速曲線作成部12と、減速曲線作成部12が作成した減速曲線に基づいて、自車両の減速制御をする減速制御部5と、を備える。
(もっと読む)
運転支援装置

【課題】本発明は、運転支援装置に係り、車両のブレーキ作動が制限されることを事前に運転者に知らせることで、車両運転者に走行上咄嗟の判断や操作を強いるのを防ぐことにある。
【解決手段】ブレーキ作動が第1所定期間継続したときにブレーキ作動を制限するブレーキ作動制限手段を備える車両の運転支援装置において、ブレーキ作動制限手段によるブレーキ作動の制限が開始される前、ブレーキ作動が開始されてから該ブレーキ作動が第1所定期間よりも短い第2所定期間継続したときに、ブレーキ作動が制限される旨の車両運転者への報知を開始する。
(もっと読む)
車両制御装置及び該装置を搭載した車両
【課題】制動力を適切に設定可能とすることによりオペレータのフィーリングを最適な状態とする。
【解決手段】アクセル開度検出センサ2と、車速センサ3と、車両の減速度を調整可能な制動手段(ソレノイド制御ブレーキ)7とを備えた制御装置10において、所定のパラメータに応じて前記減速度が設定された減速度テーブル12を複数格納した記憶部10bを備え、減速度選択手段4、5により、目的とする減速度を選択された際に、車速が予め設定された車速V1以下で、且つアクセル開度が予め設定されたアクセル開度以下である場合に、前記減速度の選択を有効として、前記減速度選択手段により選択された減速度に対応する減速度テーブル12を前記記憶部10bより読み出し、該テーブルに規定された制動パラメータに基づき前記制動手段を作動させて、選択された減速度になるように減速制御を実行する。
(もっと読む)
車両の定点停止制御方法および装置
【課題】例えば一時停止線に自動停止する場合に、停止間際において、ナビから送信されてくる残距離が、急に0になったり、逆に増加したりして、停止線までの残距離が若干変動したとしても、違和感のない停止制御を実現する。
【解決手段】GPS情報に基づいた自車の現在位置が、目標停止点に停止するために減速開始すべき距離に到達すると、GPS情報による自車の現在位置情報に基いて、定点停止のための第1の減速制御を開始する。そして、たとえば一次停止線の4〜5m程度の停止間際になったら、GPS情報を使わずに、車上にて走行距離を積算して現在位置情報を求め、これに基づき、定点停止のための第2の減速制御を停止に至るまで実行する。
第2の減速制御の間には、その基準となる残距離が、急に0になったり、逆に増加したりすることは一切無くなるので、停止線まで正確でスムースな減速制御を実現できる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】効果的な減速に関する運転支援を行うことができなかった。
【解決手段】自車両を目標車速にする目標位置を示す情報を取得し、予め決められた減速特性にて前記自車両を走行させて前記目標位置における車速を前記目標車速にする場合の、各位置における車速を基準車速として取得し、前記自車両の現在位置および前記自車両の現在車速を示す情報を取得し、前記目標位置を取得した後、前記自車両の現在車速が前記自車両の現在位置における前記基準車速を最初に越えたときに、前記自車両の現在位置より前方に制御位置を設定し、前記自車両の現在位置が前記制御位置に一致したときの前記自車両における動作に応じて前記自車両に搭載された減速支援部に前記自車両における減速を支援するための制御を行わせる。
(もっと読む)
車両速度自動制御方法、システム及びコンピュータ・プログラム・プロダクト
車両の自動速度制御方法及びシステムにおいて、燃料消費を最適化し、直感的なものと見なされる距離において、走行前方の制限速度が低下することに応じて減速を開始する。これにより、本方法及びシステムは、早過ぎる減速を防ぐ。 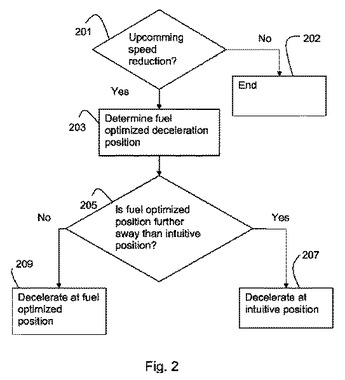 (もっと読む)
(もっと読む)
ブレーキ制御装置
【課題】 ブレーキ操作部材を能動的に制御しつつ、小型化を図ることができるブレーキ制御装置を提供すること。
【解決手段】 運転者がブレーキ操作を行うためのブレーキ操作部材(ブレーキペダルBP)と、ブレーキ操作部材に連結し、ブレーキ操作部材の作動に応じてブレーキ液をホイルシリンダW/Cへ送り出すマスタシリンダM/Cと、マスタシリンダM/Cとは別に設けられ、ブレーキ液圧を発生させる液圧源(ポンプP)と、ブレーキ操作部材の作動を能動的に制御することが必要であるか否かを判断する能動制御判断部(図4のS201,202,206,208)と、能動制御判断部の判断に応じて液圧源が発生した液圧をマスタシリンダM/Cに与えてブレーキ操作部材の作動をコントロールする能動制御(S203,204,209,210等)を行うコントロールユニットCUと、を有することとした。
(もっと読む)
二輪車走行支援装置
【課題】二輪車の安定性を確保しつつ、道路に設置した路側送信機から送信された当該道路における走行支援に関する情報を受信して二輪車の走行支援を行うことが可能な二輪車走行支援装置を提供する。
【解決手段】道路に設置したビーコンから送信されたISA及び停止制御に関する情報を受信して走行支援を行う二輪車走行支援装置において、ISA制御部43は、判定した二輪車の安定性に応じて、二輪車の走行支援の態様を変更するため、二輪車の安定性を確保しつつ、道路に設置したビーコンから送信された当該道路におけるISAに関する情報を受信して二輪車の走行支援を行うことが可能となる。
(もっと読む)
シフトダウン制御装置
【課題】補助ブレーキ作動中のシフトダウン時における減速度の抜けを解消するシフトダウン制御装置を提案する。
【解決手段】オートクルーズコントロール中に補助ブレーキを作動させた後(S3)、シフトダウン条件が成立したときに(S7−S8)、機械式自動変速機がシフトダウン動作を開始して終了するまでの変速時間中に、主ブレーキを作動させ(A)、減速度の抜けを補填する。すなわち、クラッチが切れて補助ブレーキが利かなくなる間を、主ブレーキの制動力にて補填する。
(もっと読む)
車両の走行制御装置及び車両の走行制御方法
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
車両の統合制御システム
【課題】フェイルセーフ性を向上させるとともに、車両制御機能の追加に容易に対応可能な、車両の統合制御システムを提供する。
【解決手段】統合制御システムは、運転者の操作に基づいて、駆動系を制御する主制御系(アクセル)と、制動系を制御する主制御系(ブレーキ)と、操舵系を制御する主制御系(ステア)と、車両の周囲の環境情報または運転者に関する情報に基づいて、各主制御系において用いられる情報を作成して出力するアドバイザユニットと、予め定められた挙動を車両に実現させるために各主制御系において用いられる情報を作成して出力するエージェントユニットと、現在の車両の動的状態に基づいて、各主制御系において用いられる情報を作成して出力するサポータユニットとを含む。
(もっと読む)
車両運転者を支援するための方法および装置
車速を検知するための装置および方法である。
この発明は、一旦停止線(203)を少なくとも第1の動作状態において交差することを可能にし、かつ一旦停止線(203)を第2の動作状態において交差することを可能にしない1セットの交通信号灯(201)に接近している車両(101)の運転者を支援する方法を提案する。
この方法は、(i)動作状態が変更するまでセットの交通信号灯の現在の動作状態および時間について記述する信号が、車両(101)において受信されることを提供し、(ii)車両(101)において、この車両(101)が、セットの交通信号灯(201)が第1の動作状態にある間、所定の速度範囲からの速度で一旦停止線(203)に到達することができるかどうかに関して、確認が、受信信号に基づいて実行され、さらに、(iii)車両(101)の速度が影響を受け、および/または、速度に影響を及ぼすための推奨が、その確認の結果の機能として生成される。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作の解除後に、車両が急加速することを抑制することができる車両走行制御装置を提供すること。
【解決手段】運転者の制動操作に基づいて油圧による制動トルクを発生するブレーキ装置を有する車両の車速を予め設定された目標車速となるように、エンジンが発生する駆動トルクを制御することで自動走行制御を行う車両走行制御装置において、エンジンは、運転者の加速操作に基づいても駆動トルクを発生するものであり、自動走行制御は、運転者による制動操作の解除に基づいて、運転者による加速操作に拘わらず行われる。運転者による制動操作が解除された場合(ステップST4)、運転者による制動操作の解除から所定時間T(ステップST6)は、エンジンが発生する駆動トルクを車速Vを目標車速Voとすることができる駆動トルクよりも小さく制限されるように、今回の目標駆動トルクETo(n)を算出する(ステップST7,ST8)。
(もっと読む)
車両走行制御装置
【課題】ハンチングや違和感を抑制できる車両走行制御装置を提供すること。
【解決手段】車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度センサ3と、前記車輪に制動力を付与することができるブレーキ装置200と、前記車輪速度センサ3で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与するブレーキ装置制御部83と、前記ブレーキ装置200を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定部84と、を備える。
(もっと読む)
車両走行制御装置
【課題】制動力増量制御開始時の制動力増量制御による違和感を軽減させること。
【解決手段】エンジン100の駆動力を車両の目標駆動力に基づいて制御するエンジンECU9と、ブレーキ装置200における各車輪の制動力を車両の目標制動力に基づいて制御するブレーキECU10と、自動走行制御時におけるエンジン100の目標駆動力とブレーキ装置200の目標制動力の設定を夫々行う駆動力設定部83と制動力設定部84を有し、エンジン100の目標駆動力の情報をエンジンECU9へと出力するとともにブレーキ装置200の目標制動力の情報をブレーキECU10へと出力する自動走行制御ECU8と、を備え、自動走行制御時に車両に働く総車両前後方向作用力を演算する総車両前後方向作用力算出部85を自動走行制御ECU8に設け、制動力設定部84は、総車両前後方向作用力が大きいほど制動力増量制御開始時の車両の目標制動力を大きく設定する。
(もっと読む)
車両運転支援装置
【課題】複数の車両のゲート通過の円滑化が図れる車両運転支援装置を提供すること。
【解決手段】複数の車両が通行ゲート15を通過する際に運転支援を行う車両運転支援装置1であって、複数の車両について通行ゲート15を作動させる料金所装置30との通信が可能か否かの通信状態情報を取得し、取得された通信状態情報に基づいて料金所装置30に通行ゲート31の開閉制御信号を送信して、開閉制御を行う。これにより、通行可能な車両台数を把握し連続して車両が通過できるように通行ゲートを開かせることができる。
(もっと読む)
車両用走行制御装置
【課題】運転者のブレーキペダル操作を確実に検出する車両用走行制御装置を提供すること。
【解決手段】車両に搭載され、自車両の車速が所定の速度となるように車両制御を行い、減速時にはブレーキブースタを制御して所定の減速度が得られるようにマスタシリンダ圧を発生させる、車両用走行制御装置に、ブレーキブースタに内蔵され、自車両のブレーキペダルが踏み込まれたときにオンとなるスイッチ手段と、マスタシリンダ圧を検出する検出手段と、スイッチ手段がオフとなり、且つ、検出手段により検出されたマスタシリンダ圧が所定の閾値を超えたとき、上記車両制御を中止させる制御中止手段と、を備える。
(もっと読む)
車両の走行制御装置
【課題】走行ルールに違反した原因を調査可能な車両の走行制御装置を提供する。
【解決手段】車両に搭載され、当該車両の走行を制御する走行制御装置10であって、車両の周辺の走行ルールにしたがって車両の走行を制御する走行制御部35と、車両による走行ルールの違反を判定する違反判定部37と、違反判定部により走行ルールの違反が判定された場合に、走行制御部の制御内容を記憶する記憶処理部38と、を備える。
(もっと読む)
車両の走行制御装置
【課題】設定された自動走行車速を維持するように加減速制御を行う場合に、自動走行車速が自動走行解除車速付近の速度である場合に、走行路が登坂路である場合でも、加減速制御を無用に中止させないようにする、車両の走行制御装置を提供する。
【解決手段】自動走行車速VAが自動走行解除車速VX1付近の車速Vm1〜Vm2であるか否か判定され、車速Vが減速しているか否か判定され、自動走行車速VAの設定時に、前記両判定が肯定の場合に、自動走行解除車速VX1が所定時間Tc無効にされる。
(もっと読む)
車両自動走行制御装置
【課題】実加速度が目標加速度に対して良好に追従しながら、車両を自動走行させることができる車両自動走行制御装置の提供。
【解決手段】フィードフォワード演算値及びフィードバック演算値の各演算値から目標要求トルクを求める目標要求トルク演算手段31と、その求めた目標要求トルクに基づいて車両を自動走行させるとともに、車両の何れかの車輪がスリップしたときに車輪のスリップを抑制するスリップ抑制制御を実行する自動走行制御手段Dとを備え、目標要求トルク演算手段31は、自動走行制御手段Dによってスリップ抑制制御が実行された場合、目標加速度と実加速度との偏差に基づくフィードバック演算値を保持し、その保持したフィードバック演算値及びフィードフォワード演算値の各演算値から目標要求トルクを求める。
(もっと読む)
101 - 120 / 150
[ Back to top ]