
Fターム[3D246GB34]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351) | 車間距離制御 (123)
Fターム[3D246GB34]に分類される特許
101 - 120 / 123
車両用制御装置及び制御システム

【課題】車両を停止状態から走行状態へと移行させるに際し、走行方向とは逆方向へと車両が変位するおそれがあること。
【解決手段】図18(d)に一点鎖線にて示すようにユーザのブレーキ操作によって制動トルクを低減させる場合には、制動トルクと駆動トルクとの合計が、路面の勾配に起因した重力のうちの走行方向とは逆方向の成分と釣り合うトルク(勾配トルクTrg)に満たないために、車両が走行方向とは逆方向へと変位するおそれがある。そこで、車両の加速度がゼロ以上となるまで、駆動トルクと制動トルクとの和が勾配トルクTrgとなるように、制動力を操作する。
(もっと読む)
車両用制御装置及び制御システム

【課題】車両の駆動力を生成するパワートレイン(エンジン10、自動変速装置14)と、車両の制動力を生成するブレーキアクチュエータ20とを操作することで実際の加速度を目標加速度にフィードバック制御するに際し、それぞれの操作量を算出する処理やその適合を簡易且つ適切に行うこと、更には操作量の算出を適切に行うことが困難なこと。
【解決手段】車両の実際の加速度を目標加速度に制御する際の要求トルクをパワートレインのみによっては生成できなくなると予測される場合、予めブレーキアクチュエータ20のポンプPoを起動する。そして、ブレーキアクチュエータ20による制動力の使用開始とともに、フィードバック制御の制御ゲインを変更する。
(もっと読む)
追従制御装置
【課題】 周辺車両の走行状態を含む周辺環境とドライバの好みとを考慮した最適な車間距離を確保して走行することを可能にする追従制御装置を提供する。
【解決手段】 追従制御装置1は、ECU2と、ドライバが車間モードを選択入力するための車間切替スイッチ4とを備えている。ECU2は、車間切替スイッチ4によりオートモードが選択されると、メモリ部に記憶されたドライバ好み車間距離マップから、ドライバの好みに応じた車間距離を設定すると共に、レーダの検出信号に基づいて、周辺車両の走行状態に応じた車間距離を求める。そして、ECU2は、ドライバの好みに応じた車間距離と周辺車両の走行状態に応じた車間距離とを用いて、自車両と先行車両との目標車間距離を求め、その目標車間距離に応じて速度を制御する。
(もっと読む)
制駆動力制御装置
【課題】前方車両との位置関係に基づいて駆動力の制御を行なう制駆動力制御装置であって、運転者が最適と感じる駆動力の制御を行なうことが可能な制駆動力制御装置を提供する。
【解決手段】前方車両との位置関係の目標値(402)を設定し、前記目標値に基づいて制駆動力の制御を行う制駆動力制御装置であって、前記制駆動力の制御を行わなかった場合の制駆動力に対応する第1特定値(404)と、前記制駆動力の制御を行った場合の制駆動力に対応する第2特定値(405)との差である特定偏差(407)を求める手段と、前記特定偏差に基づいて、前記目標値を変更する手段とを備えている。
(もっと読む)
車両用走行支援装置
【課題】 障害物検出手段としてレーダと画像認識に加え、運転者の脇見検出手段を用いて走行支援を行う車両用走行支援装置において、各検出手段の検出結果に応じた適切な支援制御を設定した車両用走行支援装置を提供する。
【解決手段】 レーダ(ミリ波)による障害物検出結果と、画像認識による障害物検出結果を照合して、両者で検出した場合とそれぞれのみで検出した場合に分岐する。これに脇見運転の判断を加味して、分岐を行い、分岐結果に応じて走行支援制御の開始条件を変更することで、運転者の注意に応じた支援制御を実行する。
(もっと読む)
車両制御装置
【課題】アダプティブクルーズ制御中に、プリクラッシュブレーキ制御を開始する際に、車両の安全性をより高めること。
【解決手段】アダプティブクルーズ制御が行われて、先行車両に追従走行しているときには、設定車間距離を維持するためのACC目標加速度が算出される。また、プリクラッシュブレーキ制御が開始されると、自車両を減速させるためのPCSB目標加速度が算出される。ACC目標加速度とPCSB目標加速度がともに算出された場合、これらの目標加速度を加算して、最終的な目標加速度を算出する。そして、自車両が、その目標加速度で減速するように、ブレーキアクチュエータ6などを制御する。これにより、プリクラッシュブレーキ制御の開始に伴って制動力が弱められるような事態が発生することを確実に防止できる。
(もっと読む)
車両用制御装置
【課題】本発明は、路面の状況の変化にかかわらず、常に先行車や障害物との距離を検出して精度の高い先行エリア状態検出制御を行い得る車両用制御装置を実現することを目的としている。
【解決手段】このため、レーダにより車両前方に先行する車両、あるいは障害物があるかどうかを検出する先行エリア状態検出手段と、この先行エリア状態検出手段により検出された先行エリアの状態に応じて車両を制御する車両制御手段とを備えた車両用制御装置において、車両に発生するピッチング量を検出するピッチング量検出手段と、このピッチング量検出手段により検出されたピッチング量に応じて、レーダの照射角を制御する照射角制御手段とを備えている。
(もっと読む)
車両制御装置
【課題】複数のアプリケーションを備えた場合に、汎用性に優れた車両制御装置を提供すること。
【解決手段】ステップ210では、対象物選択処理を行う。ステップ220では、危険物判定処理を行う。ステップ230では、(加減速ECU3から受信した)ブレーキに関するドライバ操作加速度が、所定の判定値αより小さいか否か、即ち、ブレーキが不十分であるか否かを判定する。ブレーキが十分でない場合は、ステップ240に進み、ブレーキアシスト制御の実行要求フラグをオンにする。また、ドライバ操作加速度に所定値βをかけた値を目標加速度に設定する。一方、ブレーキが十分な場合は、ステップ250に進み、ブレーキアシスト制御の実行要求フラグをオフにし、目標加速度を0に設定する。ステップ260では、実行要求フラグ、目標加速度、Max Jerk、Min Jerkを、加減速ECU3に送信する。
(もっと読む)
車両の運転支援装置
【課題】適切なタイミングで円滑な走行制御の介入を行うことができる車両の運転支援装置を提供する。
【解決手段】ACC制御時の目標減速度(要求減速度Ga)の演算を予め設定されたマップ等の演算情報を用いて行い、演算した目標減速度に基づいてブレーキ12の自動介入等の走行制御を行う運転支援装置2において、走行制御ユニット5は、自車両1が基準条件下で基準路を走行していると仮定した場合に発生することが予測される発生予測減速度Ghを演算するとともに、発生予測減速度Ghと実際の減速度G0との偏差ΔGを演算し、この偏差ΔGを用いて要求減速度Gaを補正して最終的な目標減速度である指示減速度Grを演算する。
(もっと読む)
車両の車速制御装置
【課題】所定の設定速度に制御しつつ旋回限界を超えずに安定した旋回を確保可能な車両の車速制御装置を提供する。
【解決手段】先行車との目標車間距離に対応する所定の設定車速に応じた第1の目標車速指令値Vacc を演算し、その第1の目標車速指令値Vacc となるように車両の速度制御を行う先行車追従制御と、車両が安定して走行可能な限界旋回状態に近づいたと判定すると車両の安定した旋回走行を維持するために必要な目標減速度を演算しその目標減速度に応じた制動力を車両に負荷する旋回安定制御を行う。このとき、上記旋回安定制御が演算した目標減速度に応じた第2の目標車速指令値Vcop と、上記先行車追従制御が演算した第1の目標車速制令値とのいずれか小さい値側の目標車速指令値となるように排他的に車両の速度を制御する。
(もっと読む)
ブレーキ制御装置
【課題】システム構成を複雑化することなく、リザーバタンクとの配管の液漏れが発生したとしてもマニュアルブレーキへの移行期間中の制動力を確保可能なブレーキ制御装置を提供する。
【解決手段】ブレーキ液を貯留するリザーバタンク51と、ハウジング内に収容され前記リザーバタンク51に貯留されたブレーキ液をポンプ吸入部より吸入し、ポンプ吐出部からホイルシリンダ内に供給するポンプ組立体P1と、前記ハウジングに形成され、前記ポンプ吸入部に連通する吸入ポート70と、前記ポンプ吐出部とホイルシリンダ側を連通する吐出ポート66と、前記吸入ポート70と前記リザーバタンク51のポート間に接続されたサクションパイプ69と、前記ハウジングに一体的に設けられ、前記ポンプ吸入部と前記吸入ポート70の間に形成され、少なくとも設定された一回の最大液圧の制動に必要なブレーキ液の量を貯留できる容積を有する貯留室50,60とを備えた。
(もっと読む)
車間距離制御装置
【課題】運転者の負荷を軽減した車間距離制御装置を提供する。
【解決手段】先行車両および車両周辺を監視し、合流車両が合流できるように自車両と先行車両との車間距離を制御する車間距離制御装置1であって、合流する車両を検知し(S14)、合流する車両の全長Rが所定値X以上の場合は(S16)、目標車間距離をR+αと設定する。これによって、合流する車両Cに応じた運転者の判断や操作が不要となる。
(もっと読む)
追従制御装置
【課題】 周辺環境に適した車間距離を確保して走行することを可能にする追従制御装置を提供する。
【解決手段】 追従制御装置1は、車両に搭載されたECU2を備えている。ECU2は、メモリ部13に記憶されたドライバ好み車間距離マップから、ドライバの好みに応じた車間距離を設定する車間距離設定部15と、前方レーダ9及び後方レーダ10の検出信号に基づいて、自車両と周辺車両との車間距離等を求める周辺車両検出部16と、自車両と周辺車両との車間距離等に基づいて、周辺車両の走行状態に応じた車間距離を求める車間距離設定部17と、ドライバの好みに応じた車間距離と周辺車両の走行状態に応じた車間距離とを用いて、自車両と先行車両との目標車間距離を求める目標車間距離設定部18と、目標車間距離に応じて速度を制御する速度制御部20とを有している。
(もっと読む)
走行制御装置
【課題】複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる走行制御装置を提供する。
【解決手段】ナビゲーションシステム12、前方ミリ波レーダ30、近距離ミリ波レーダ32、前方画像センサ40及び後方/側方/周辺画像センサ42の複数のセンサ類を備え、LKA部221、ACC部222、PCS部241の複数の走行制御システムを備えた走行支援システム1において、センサの優先順位は走行制御の全てについて固定されているのではなく、走行制御の種別それぞれに対応して優先順位が設定され、LKA部221等のそれぞれは優先順位に従ってセンサ類それぞれの検出結果を適用して車両を制御するため、複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる。
(もっと読む)
走行制御装置
【課題】ドライバーが感じる先行車において行かれる感覚を和らげられる車両走行制御装置を提供する。
【解決手段】
本発明による走行制御装置は、自車速を検出する自車速検出手段と、先行車との車間距離を検出する先行車検出手段と、前記車間距離検出手段に基づいて第1の車速指令値を算出する第1車速指令値算出手段とを有する。さらに自車両前方の走行路におけるカーブ情報を検出するカーブ検出手段と、前記カーブ状態に基づいて前記カーブを走行するための第2の車速指令値を算出する第2車速指令値算出手段とを有する。目標車速設定手段は、これらの車速指令値に基づいて最終目標車速を設定する。そして、前記第1車速指令値が前記第2車速指令値よりも大きい状態でカーブを走行する際は、前記第2車速指令値よりも大きく且つ前記第1車速指令値よりも小さな車速を最終目標車速として設定可能である。車速制御手段は、目標車速設定手段で設定された最終目標車速に基づいて自車速を制御する。
(もっと読む)
ドライバーアシストシステム
本発明はパラメータによって定められる複数のアシスト機能を有するドライバーアシストシステムに関する。本発明によれば、ドライバーアシストシステムは可変のパラメータによって適応化可能に構成されている。  (もっと読む)
(もっと読む)
車両の駆動部の駆動のための電子液圧制御系
【課題】
【解決手段】本発明は、少なくとも1つの駆動部(2乃至5)、特に車両のピストン−シリンダー組体の駆動のための電子液圧制御系(1)であって、電子制御ユニット(ECU)を有する組体(7)と、高圧ポンプ(9)を駆動するために電子制御ユニット(ECU)によって駆動される電気モーター(8)と、電子液圧弁(10乃至17)を収容するための、チャンネルを収容するための、制御可能な高圧ポンプ(9)を収容するための収容体であって、制御可能な高圧ポンプ(9)は、液圧接続部(30,31;32,33)を介して圧力変換器(27)及び/あるいは容器(34)に接続され、駆動部(2乃至5)特にピストン−シリンダー組体の圧力空間にも接続可能である、収容体と、を具備し、電子液圧弁(10乃至17)及び電気モーター(8)は電子制御ユニット(ECU)にネットワーク化されている、電子液圧制御系に関し、高圧ポンプ(9)を通液するためと駆動部(2乃至5)の体積流及び/あるいは圧力を制御するためとの両方のために電子制御弁(10乃至17)が設けられている。
本発明の核心は、高圧ポンプ(9)を通液するため、また、駆動部(2乃至5)の圧力を制御するための電子液圧制御系(1)において、同組の電子液圧弁(10乃至17)を用いることであると考えられる。
(もっと読む)
低圧アキュームレータを有する自動車ブレーキシステム
油圧配管4を有する自動車ブレーキシステム1であって、前記油圧配管を通して、ブレーキシリンダ8から車輪ブレーキモジュール6がブレーキ媒体によってブレーキ圧を加えられ、かつ低圧アキュームレータ13が、過剰なブレーキ媒体を一時的に受入れるために油圧配管に接続され、その際、前記低圧アキュームレータ13が、一時貯蔵されたブレーキ媒体を戻すために、リターンフロー配管12、および、リターンフロー配管12内に配設されたリターンポンプ14を介し前記油圧配管4に結合され、リターンポンプ14が、搬送性能の調整のために、各ブレーキサイクル中、搬送性能に対応するポンプ駆動の一期間に一度作動されるように周期的に制御される自動車ブレーキシステム1が、快適なペダル感覚で、特に高い稼動安全性を提供するものである。そのために、リターンフロー配管12内に配設されたリターンポンプ14に関連付けられた制御ユニット16が、ブレーキサイクル中のリターンポンプ14のポンプ駆動の回数に関する設定値を、所定の初期値から始めて、低圧アキュームレータ13内の充填状況を考慮し、および/または充填状況の時間微分を考慮して適宜適合させて提示する。 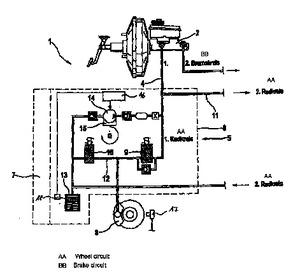 (もっと読む)
(もっと読む)
車両用走行制御装置
【課題】自車両前方の物体との相対位置関係に基づいて自車両の走行を制御する走行制御手段を備えた車両において、自車両前方の物体を認識するセンサに検出範囲が変化する衝撃が加わった場合に、安全走行を確保する。
【解決手段】衝突回避判断手段の判断結果に基づいて自車両を自動制動制御する自動制動制御の終了後、衝突回避判断手段が衝突回避不可能と判断した結果に基づいて、自動制動制御手段による自動制動制御、又は走行制御手段による走行制御が作動され難くなるように作動条件を変更する。
(もっと読む)
車間距離制御型定速走行装置
【課題】先行車の減速や他車の割り込みによって車間距離が急に減少した場合でも、先行車へ接近し過ぎないように制御する。
【解決手段】警報の発令状況、車間距離制御の解除操作状況および車両の操作量に基づいて、警報発令条件および/または車間距離制御開始条件を変更する。これにより、運転者ごとの好みや癖、あるいは運転経験に合わせた最適なタイミングで警報を出すことができ、先行車へ接近し過ぎるのを防止できる。
(もっと読む)
101 - 120 / 123
[ Back to top ]