
Fターム[3D246GB34]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351) | 車間距離制御 (123)
Fターム[3D246GB34]に分類される特許
81 - 100 / 123
間隔制御経済速度走行制御システム

本発明は、電気制御装置(24)を含む常用制動機を持つ自動車用の間隔制御経済速度走行制御システムに関し、電気制御装置(24)が、自動車の走行データ及び先行車両に対する間隔データを検出し、走行データ及び間隔データから運動予報を作成し、駆動手段又は制動手段に影響を及ぼすことによって自動車の運動状態に影響を及ぼし、所定の限界減速度(agrenz)を仮定して、自動車の運転者の介入なしに動作する間隔制御経済速度走行制御システムにおいて、他の自動車との衝突の衝突確率が所定の衝突確率閾値を超過することを運動予測が示す時、警戒信号を自動車(10)の運転者に与える。本発明によれば、電気制御装置(24)が、常用制動機により得られる最大制動減速度(amax)を計算可能にする制動オパラメータを検出し、最大制動減速度(amax)が所定の減速度閾値を下回る時、限界減速度(agrenz)を減少するために設けられている。 (もっと読む)
車両用走行制御装置及びその方法

【課題】運転者の発進操作に合致させて自車両を自動発進させる。
【解決手段】走行制御装置は、先行車両の走行状態を検出する先行車発進判定部24と、自車両のブレーキペダルの操作状態を検出するブレーキ操作状態判定部25と、自車両の制動力及び駆動力の少なくとも何れかを制御するとともに、先行車発進判定部24が先行車両の発進を検出した後、ブレーキ操作状態判定部25がブレーキペダルが踏み込み状態から戻され始めたことを検出すると、先行車両の走行状態を基に自車両が発進可能な制駆動力を制御する目標追従発進加速度算出部26と、を備える。
(もっと読む)
車間距離制御装置
【課題】交通事故を未然に防ぐことができる車間距離制御装置を提供すること。
【解決手段】車間距離制御装置は、自車の位置を示す自車位置情報を衛星通信により取得する。自車の周囲に他車が存在する場合、他車に搭載された車間距離制御装置に対して無線通信を行い、他車の位置を示す他車位置情報を全て取得する。地図を表す地図データベースを参照して、全ての他車位置情報の中から、自車の前後に存在する特定他車の位置を示す特定他車位置情報を特定する。自車位置情報が示す位置と特定他車位置情報が示す位置とに基づいて、自車と特定他車との距離を表す車間距離を算出する。自車の速度を計測し、速度と適切な車間距離とを対応付ける距離データベースを参照して、自車の速度に対応する適切な車間距離として検索適切車間距離を検索する。車間距離が検索適切車間距離よりも短い場合、その旨を表す注意情報を自車の運転手に通知する。
(もっと読む)
制動支援装置
【課題】この発明は、簡単な装置構成で制動装置の始動タイミングを早めることができ、車両を素早く且つ安全に停止させることができる制動支援装置を提供することを課題とする。
【解決手段】制動システム1のコントローラ10は、レーダ2を介して当該車両が危険回避動作を必要とする状況に陥ったことを検知し、且つ、フットレスト7の踏力センサ8を介してフットレスト7が踏まれたことを検知したとき、ブレーキペダル5の操作を待たずに、制動装置のアクチュエータ4をコントロールして制動を開始する。
(もっと読む)
ブレーキ液圧制御装置
【課題】ブレーキ液圧制御装置において、圧力センサ、電磁弁、ポンプ駆動用モータに接続される制御系を安価かつ容易に交換する。
【解決手段】ブレーキ液圧制御装置15は、複数の電磁弁(31など)が第1の面21aに配設され、ポンプ34a,44aを駆動するモータ34bが第2の面21bに取付けられたハウジング21と、前記電磁弁およびモータ34bを制御するメインECU18を含んで構成されハウジング21に着脱可能な第1ユニットUcと、第2の面21b側に配設され液圧を検出する圧力センサP1と、第2の面21b側から第1の面21a側に延在する導電部材であって、モータ34bおよび圧力センサP1と電気的に接続可能な端部を第2の面21b側に有する導電部材51bと、その導電部材の第1の面21a側の端部がメインECU18に着脱可能な接続部22と、を備えている。
(もっと読む)
車両用走行制御装置
【課題】追従走行時のユーザ利便性を向上させた車両用走行制御装置を提供すること。
【解決手段】車両に搭載され、自車両の車速を目標車速に制御する車両用走行制御装置が、先行車に対する追従走行中、運転者によりブレーキペダルが踏み込まれ、次いで、運手者によりブレーキペダルが離されたとき、上記目標車速をブレーキOFF時の自車両車速に変更する目標車速変更手段と、ブレーキOFF時の先行車との車間距離D2がブレーキON時の先行車との車間距離D1より短いとき(D2<D1)、上記目標車速変更手段による上記目標車速の変更を禁止する目標車速変更禁止手段と、を有する。
(もっと読む)
ブレーキ制御装置、これを備えたブレーキシステム及び車両
【課題】ブレーキシステムの性能を向上させる。
【解決手段】各ブレーキのブレーキキャリパ21a〜dを動作させる第一及び第二アクチュエータ装置200,300と、これらアクチュエータ装置200,300を制御するブレーキ制御装置100とを備えている。ブレーキ制御装置100は、ブレーキに求められる目標性能を設定する目標性能設定部112と、ブレーキによる目標ブレーキ力を求める目標ブレーキ力算出部113と、ブレーキにより目標ブレーキ力を得られ、且つ目標性能を実現できる各アクチュエータ装置の駆動率を求める駆動率算出部114と、各駆動率に応じた駆動信号を各アクチュエータ装置200,300に出力する通信制御部115と、を備えている。
(もっと読む)
自動車およびその制御方法
【課題】先行車両に追従する定速走行中の制御時における車両のエネルギ効率の向上を図る。
【解決手段】レーダクルーズコントロール制御によって車両に比較的大きな制動力が要求されているときには、運転者によってブレーキペダルが踏み込まれたときより小さな速度V2を置き換え車速Vchに設定し(S230)、車速Vが置き換え車速Vch以上のときには、要求制動トルクTr*の範囲内でモータを回生制御し(S150〜S170)、車速Vが置き換え車速Vch未満のときには、モータによる制動トルク(回生トルク)を油圧ブレーキによる制動力にスムーズに置き換える(S180,S190)。これにより、レーダクルーズコントロール制御中の車両のエネルギ効率を向上させることができる。
(もっと読む)
車両走行制御装置
【課題】 停止保持状態にある自車両が発進する際に、ドライバに与えるショック感を低減することができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、カメラ2から送信される画像信号に基づいて先行車両におけるブレーキランプの点灯状態を判断する。自車両が停止しているときに、先行車両のブレーキランプが消灯した場合に、自車両の駆動レンジをニュートラルレンジからドライブレンジに移行させる。
(もっと読む)
湿式マルチディスクブレーキの操作方法および湿式マルチディスクブレーキ
本発明は、半径方向に延在する固定ディスクと回転ディスク(6、7)が、ブレーキング時に、空隙を除去しつつ互いに押圧される、冷却オイルによって湿式回転を行う、特に路上走行車両のためのマルチディスクブレーキを操作するための方法に関する。この方法は、ブレーキを弛めた後に、互いに組み込まれたディスク(6、7)が互いに離間され、、オイルを含まないかまたはオイルを実質的に含まない空隙が形成され、かつブレーキングに先立つディスク(6、7)の送りによって空隙が最小化されるように形成されている。 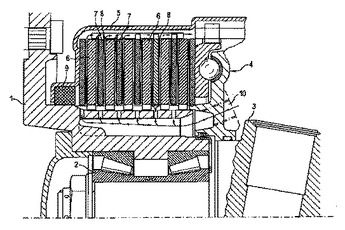 (もっと読む)
(もっと読む)
車両の走行制御装置
【課題】先行車の右左折を認識した際の目標車間距離を適正に設定し、運転者の要求に沿った走行制御を実現することができるようにする。
【解決手段】自車両1に搭載された、ステレオカメラ3aを備える前方認識装置3で認識した先行車情報に基づいて、少なくとも追従目標車間距離L1を設定し(S6)、次いで先行車1’の右左折を判定し(S7)、先行車1’の右左折を検出した場合、追従目標車間距離L1に補正係数KG(例えばKG=0.5)を乗算して、右左折時の追従目標車間距離L1を設定する(S8)。
(もっと読む)
車両の走行制御装置。
【課題】先行車との関係に応じ、ドライバのフィーリングに合った適切な減速度で減速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、車間距離dが最終目標距離dlim以下となったときのブレーキ制御用の目標減速度Gbを、最終目標距離dlimに対して車間距離dが占める割合Dr(=(d/dlim)×100)に応じて可変設定する。これにより、先行車に対するプリクラッシュ制御を前提としたブレーキの自動介入制御時においても、過剰な減速度による減速を防止する。すなわち、割合Drに基づいて目標減速度Gbを設定することで、最終目標距離dlimに対して自車1が同じ距離だけ割り込んだ場合でも、最終目標距離dlimが小さい場合には大きな減速度での的確なプリクラッシュ制御を確保しつつ、最終目標距離dlimが大きい場合には相対的に小さな減速度でプリクラッシュ制御を行う。
(もっと読む)
オートクルーズ装置
【課題】 先行車との車間距離を保持しながら走行可能なオートクルーズ装置に関し、常に適切なタイミングで補助ブレーキを作動させることを目的とする。
【解決手段】 先行車に対する目標車間距離doを算出する目標車間距離算出手段26と、先行車との実際の車間距離dを求める実車間距離検出手段18と、目標車間距離doと実車間距離dとの偏差Δdを求める車間距離偏差算出手段28と、目標車間距離doと該車間距離偏差Δdとの比としての車間距離偏差率drを求める車間距離偏差率算出手段30と、少なくとも該車間距離偏差率drに基づいて該車両の制動装置を制御する制動装置制御手段22とを有するように構成する。
(もっと読む)
油路制御用モジュレータ
【課題】衝撃的な振動が加えられた場合でも,コイル組立体の通電端子自体及び,それと電子制御ユニットとの接続部に応力が集中しないようにし,しかもコイル組立体の通電による過熱を効果的に防いで,その耐久性を高めるようにする。
【解決手段】基体30のデッキ面33にケーシング31を接合してなり,複数の電磁弁Vの弁組立体34を,ケーシング31内でデッキ面33に開口する弁取り付け孔43に装着すると共に,同弁Vのコイル組立体35をデッキ面33に設置し,このコイル組立体35の通電制御を行う電子制御ユニット18をケーシング31に取り付けた,油路制御用モジュレータにおいて,コイル組立体35を軸方向両端から挟持する金属製の一対の第1及び第2支持板49,50をケーシング31内で基体30に固着し,各支持板49,50の板面を,それに当接する全電磁弁Vのコイル組立体35の端面の総合面積より広くした。
(もっと読む)
車両のブレーキ油圧制御装置
【課題】複数の電磁弁及び複数の油圧センサを油路制御用モジュレータに合理的に配置して,油路制御用モジュレータのコンパクト化を可能にする。
【解決手段】第1及び第2電磁弁群を,油路制御用モジュレータ3のデッキ面33上で正方形の頂点に配置される少なくとも4個の電磁弁5a,5b,6a,6b;5c,5d,6c,6dで構成すると共に,第1電磁弁群と第2電磁弁群,第1油圧センサ群と第2油圧センサ群を,前記デッキ面33の仮想区分線Lで区分される第1及び第2領域A1,A2に前記仮想区分線Lに関してそれぞれ対称的に配置し,各4個の電磁弁に囲まれる中心部に第1及び第2油圧センサ群の1個の油圧センサ21a,21cを配置し,また各4個の電磁弁の外側に対応する油圧センサ群の他の2個の油圧センサ20a,21b;20b,21cを,それぞれの一部が相隣る2個の電磁弁間に食い込むように配置した。
(もっと読む)
車間維持支援装置および車間維持支援方法
【課題】車両の走行を適切に支援できる車間維持支援装置および車間維持支援方法を提供する。
【解決手段】定車間制御状態にある場合に所定の条件の少なくともいずれか1つが成立すると、制御装置3は、定車間制御状態から減速支援制御状態に遷移するよう各部を制御するように構成した(状態遷移G)。すなわち、検出された自車両の走行環境に基づいて、または、検出したドライバの操作に基づいて、定車間制御を解除するが、減速支援制御は解除しないように構成した。したがって、定車間制御によって車両が加速されることを防止して、車両の減速を行う減速支援制御を継続できる。これにより、ドライバの意図しない車両挙動を防止しつつ、減速を支援する走行シーンを拡大できるので、走行環境やドライバの操作に応じて適切に車両の走行を支援できる。
(もっと読む)
運転走行支援装置
【課題】運転者に運転能力が低下していることを気付かせ、運転能力が低い状態での運転を減少させる運転走行支援装置を提供する。
【解決手段】運転走行支援装置10は、運転者の覚醒状態又は飲酒状態を検出する運転者状態検出部11と、前記運転者状態検出部11により検出された覚醒状態又は飲酒状態に基づいて、前記運転者の状態を判定する運転状態判定部12と、前記運転状態判定部12により判定された前記運転者の状態に基づいて、アクセル、ブレーキ、ステアリング、車間距離制御手段及び車線維持手段の少なくとも1つの制御特性を変更するように制御する車両制御部13と、を備えている。
(もっと読む)
車両の走行制御装置
【課題】 運転者に対して最適なタイミングで車間距離の制御や衝突回避の制御を実施する。
【解決手段】 先々行車を検知するミリ波レーダ2を備え、運転者からの前方の視認状態の情報を入手する前方カメラ12を備え、ミリ波レーダ2により先々行車の存在が確認された時の前方カメラ12による前方の見え方に応じてエンジン4の出力制御の作動状況、ブレーキ5の効かせ方の状況、シートベルト6やサポート部材9による乗員の拘束状況の作動タイミングを調整し、運転者の目線でみた状態に基づいて、車間距離の制御や衝突回避の制御といった走行制御を的確に行なう。
(もっと読む)
車両走行制御装置
【課題】自動走行制御中に運転者が加速操作又は減速操作した際に車両を運転者の意図に沿って加速又は減速させること。
【解決手段】エンジン100を駆動目標制御量に基づいて制御する第1ECU(エンジンECU9)と、ブレーキ装置200を制動目標制御量に基づいて制御する第2ECU(ブレーキECU10)と、車両の車速が目標車速となるように車両走行制御を行う際の駆動目標制御量及び/又は制動目標制御量を算出して当該駆動目標制御量を第1ECUへと出力するとともに当該制動目標制御量を第2ECUへと出力する第3ECU(自動走行制御ECU8)と、を備え、その第3ECUは、車両走行制御中に運転者による加速操作を検知した際、ブレーキ装置200における車両走行制御用の制動力による目標車速を現在の車両の車速よりも高速側にするよう構成すること。
(もっと読む)
車両用制御装置及び制御システム
【課題】車両を停止状態から走行状態へと移行させるに際し、走行方向とは逆方向へと車両が変位するおそれがあること。
【解決手段】図18(d)に一点鎖線にて示すようにユーザのブレーキ操作によって制動トルクを低減させる場合には、制動トルクと駆動トルクとの合計が、路面の勾配に起因した重力のうちの走行方向とは逆方向の成分と釣り合うトルク(勾配トルクTrg)に満たないために、車両が走行方向とは逆方向へと変位するおそれがある。そこで、車両の加速度がゼロ以上となるまで、駆動トルクと制動トルクとの和が勾配トルクTrgとなるように、制動力を操作する。
(もっと読む)
81 - 100 / 123
[ Back to top ]