
Fターム[3D246GB34]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351) | 車間距離制御 (123)
Fターム[3D246GB34]に分類される特許
21 - 40 / 123
車両用速度制御装置
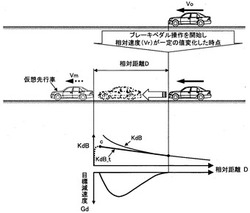
【課題】先行車両が存在しない状況においても、ドライバにとって違和感のない速度制御を行うことができる車両用速度制御装置を提供する。
【解決手段】ブレーキペダル操作を開始し、相対速度が一定の値変化した時点で、自車両よりも初期距離だけ前を目標速度で相当する仮想先行車を設定する。そして、初期距離、目標速度から、接近離間状態評価指標の初期値を算出する。さらに、速度制御開始条件成立後の相対距離を、その条件が成立してからの経過時間と、相対速度の現在値と、初期距離とから逐次算出する。そして、これら初期距離、接近離間状態評価指標の初期値、相対距離から目標相対速度を逐次算出する。そして、目標相対速度と現在の実際の相対速度との差に基づいて速度制御を行う。よって、先行車両が存在していなくても、接近離間状態評価指標KdBを用いた、ドライバにとって違和感のない速度制御を行うことができる。
(もっと読む)
車間距離制御装置

【課題】自車の停止保持制御中に先行車が発進した場合、先行車の発進状態に応じて追従走行制御の再開を可能とする。
【解決手段】自車の停止保持制御中に先行車が発進したとき、先行車車速推定部12で先行車の車速と加速度とに基づいて発進から所定時間後の先行車の車速を推定し、ACC目標車速設定部13で先行車と自車との車間距離及び先行車の推定車速に基づいて追従走行の目標車速を設定する。そして、ACC再セット可否判定部14で目標車速を判定閾値と比較し、目標車速が判定閾値を超えているとき、ドライバのスイッチ操作入力によるACCの再セット許可と判定し、目標車速が判定閾値以下のときには、ACC再セット禁止と判定する。これにより、自車の停止保持制御中に先行車が発進した場合、先行車の発進状態に応じて追従走行制御の再開を可能とすることができる。
(もっと読む)
走行制御装置
【課題】自車両と直前車両との車間距離を正確に制御することができる走行制御装置を提供する。
【解決手段】走行制御装置は、車間距離を短くする要求があった場合に、隊列の先頭車両が一定の加速度以上で加速中または加速予定であるときは、自車両と直前車両との車間距離を短くする制御を開始せずに待機し、先頭車両が一定の加速度以上で加速中または加速予定でないときは、自車両と直前車両との車間距離を短くする制御を開始する。また、走行制御装置は、車間距離を長くする要求があった場合に、隊列の先頭車両が一定の減速度以下で減速中または減速予定であるときは、自車両と直前車両との車間距離を長くする制御を開始せずに待機し、先頭車両が一定の減速度以下で減速中または減速予定でないときは、自車両と直前車両との車間距離を長くする制御を開始する。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
車間距離制御装置
【課題】先行車両と自車両との車間距離が基準車間距離を超えている場合において、燃料消費率の改善を図る。
【解決手段】ECU4は、車速センサ3が検出する車両1の速度に応じた基準車間距離を算出し、レーダセンサ2が検出する先行車両と車両1との検出車間距離と比較する。検出車間距離が基準車間距離以下の場合は基準車間距離を目標車間距離として車間距離制御を行い、検出車間距離が基準車間距離を超えている場合は基準車間距離を延長した延長車間距離を目標車間距離として車間距離制御を行う。
(もっと読む)
車両の制動制御装置
【課題】 制動装置に故障が生じたときに、ドライバが制動装置の故障を認識していない場合であっても、車両が動き出すことを防止することができる制動制御装置を提供する。
【解決手段】 ブレーキECU1は、ブレー故障センサ6からブレーキ故障信号を受信した際に、警報装置8に警報信号を送信するとともに、パワートレインECU2にブレーキ異常信号を送信する。パワートレインECU2は、ブレーキ異常信号を受信した場合に、パワートレイン5におけるクラッチ12を開放する。また、車両が走行する道路の路面勾配が上り勾配である場合には、クラッチ12を係合する。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
自動制動制御用ECU、車型学習方法および車両
【課題】自動制動制御用ECUを複数の車型の車両で共通化すること。
【解決手段】複数の異なる車型の車両に搭載され、車両の自動制動制御装置3を制御する自動制動制御用ECU1であって、車型および当該車型に対応するセンサの情報を、これらの情報を保持する車両ECU2から取得して記憶する車型情報学習部10と、車型情報学習部10が記憶した情報に基づいて車両に適合する制動制御パターンを選択する制動制御パターン選択部11と、を有する。
(もっと読む)
ブレーキ制御装置
【課題】 減圧時における減圧弁の作動頻度を低減できるブレーキ制御装置を提供する。
【解決手段】 ブレーキECU102は、同一配管系の2つのホイルシリンダW/Cに対する液圧指令値Pwcomにおいて、一方の液圧指令値Pwcomが他方の液圧指令値Pwcomよりも低く、低圧側のホイルシリンダW/Cの液圧指令値Pwcomが減圧指令である場合に、一方のソレノイドインバルブ4とソレノイドアウトバルブ5を共に閉じて低圧側のホイルシリンダW/Cの液圧を保持するよう液圧制御を行い、その後2つの液圧指令値Pwcomが略同一となったとき、ソレノイドインバルブ4を開弁する。
(もっと読む)
ブレーキシステム
【課題】ブレーキシステムの信頼性を向上させる。
【解決手段】増圧リニア制御弁172の閉状態において、ポンプ装置65の作動により、増圧リニア制御弁172の動力式液圧源側の液圧を第1設定圧PACC0とする。保持弁153、増圧機構遮断弁192を閉状態として、増圧リニア制御弁172を開状態とする。ブレーキシリンダ圧センサ226の検出値が異常判定しきい値Pthより大きくなれば、制御系は正常であり、異常判定しきい値Pthに達しない場合には制御系は異常であるとされる。制御系が正常であるか否かが検出されるのであり、ブレーキシステムの信頼性を向上させることができる。
(もっと読む)
運転支援装置
【課題】自車両の前方を走行する車両の挙動に応じて車間距離を自動的に延長できる機能性を向上させた運転支援装置を提供すること。
【解決手段】自車両が交差点に近づくと、交差点位置判断部11は先行車両の速度と加速度とをレーダ装置1により検出する。さらに先行車両と先先行車両との間の車間距離に応じた補正係数を読み出す。また交差点から自車両までの距離を算出し、先行車両の速度、交差点から自車両までの距離、先行車両の加速度をもとに延長車間距離特性データを参照し、自車両が交差点に接近したときの延長車間距離を読み出し補正係数により補正する。この結果、補正された延長車間距離は先行車両の加速度、先行車両と先先行車両との間の車間距離、交差点からの距離などの先行車両、先先行車両の挙動に応じて延長されたものとなる。
(もっと読む)
走行制御システム、制御プログラム、記録媒体
【課題】先行車両への追突を回避可能である安全な走行制御と、自車両に急激な速度変化が生じることのない乗り心地の良好な走行制御とを両立して実現できる走行制御システムを提供する。
【解決手段】走行制御システムは、自車両が現時刻の先行車両の位置に到達するまでの到達時間を分割することで複数の予測区間を設定して(ステップS105)、到達時間の経過時点における自車両の目標加速度を各予測区間毎に算出する(ステップS107)。そして、各予測区間における自車両の予測加速度や、連続する2つの予測区間における操作変化量を入力値とする評価関数を作成して(ステップS108)、評価関数の出力値が最小となる入力値を求める一般化予測制御に基づき、各予測区間における自車両の加速度を取得して(ステップS109)、取得値に現時刻以降の自車両の加速度を制御する(ステップS110)。
(もっと読む)
運転支援装置
【課題】渋滞をより緩和することが可能な運転支援装置を提供する。
【解決手段】本発明の一実施形態に係る運転支援装置1は、定常速度で走行するための運転支援装置において、直前車の発進とともに加速制御を行い、直前車を追従する追従制御手段23と、車速を直前車よりも小さくし、直前車との車間距離を次第に拡大する車間拡大制御手段24と、車速を直前車よりも大きくし、直前車との車間距離を次第に縮小する車間縮小制御手段25とを備える。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】閉弁特性と開弁特性とが大きく異なる場合であっても、良好な減圧を実現することができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置の制御部は、調圧弁の上下流の差圧と、閉弁させるための出力電流値との関係を示す閉弁用マップMP2と、差圧と、開弁させるための出力電流値との関係を示す開弁用マップMP1とが記憶された記憶部を備え、調圧弁の開弁によって車輪ブレーキ内の液圧を減圧する場合には、開弁用マップMP1の出力電流値と閉弁用マップMP2の出力電流値を交互に選択して、調圧弁に流す電流を制御する電流値切替制御を実行する。
(もっと読む)
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
車両制御装置
【課題】ドライバの意図に沿った走行状態を実現する車両制御装置を提供する。
【解決手段】先行車に対して追従制御を行う車間距離制御または設定された速度に収束するように定速走行を行う定速走行制御を備えた車両制御装置において、ドライバのブレーキ操作状態を検出するブレーキ操作状態検出装置と、車間距離制御又は定速走行制御を実施中にブレーキ操作が検出されると、ブレーキ操作状態に応じた減速を行う減速制御部と、ブレーキ操作の終了が検出されると加速方向の制御をキャンセルする加速制御制限部とを有するコントロールユニットを備えた。
(もっと読む)
制御要求調停装置
【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
車両制御装置および車両制御方法
【課題】 車速変動の伝播を抑制することができる車両制御装置および車両制御方法を提供する。
【解決手段】
本発明に係る車両制御装置および車両制御方法においては、交通流量が最大化される自車11の減速制御をおこなう際、自車11と先行車両12との車間距離が所定の範囲内にあるときには、交通流量が最大化される車間距離と車速に自車を減速制御し、自車11と先行車両12との車間距離が所定の範囲内にないときには、交通流量が最大化される速度のみに自車を減速制御する。それにより、交通流量が最大となる車間距離をサグ部に到達するまでに確保できない事態や維持できない事態が生じた場合であっても、少なくとも交通流量が最大となる車速となるように自車11を減速制御するため、車速変動の伝播が効果的に抑制され、サグ渋滞の抑制につながる。
(もっと読む)
ブレーキ制御システム
【課題】マスタシリンダ圧を精確に検知し、バックアップする機能を備えて、的確なブレーキ制御を可能とするブレーキ制御システム。
【解決手段】運転者のブレーキ操作により作動するマスタシリンダと、ブレーキ操作の量に応じて前記マスタシリンダ内の圧力を調整する第1の機構と、前記第1の機構の作動を制御する第1の制御装置と、マスタシリンダ内の前記圧力がホイールシリンダに連通するのを調整する第2の機構と、前記第2の機構の作動及び前記ホイールシリンダに連通される圧力を加圧するポンプ装置の作動を制御する第2の制御装置とを備え、第1及び第2の制御装置は、それぞれの電源回路及びCPUを内蔵し、前記マスタシリンダ内の圧力を計測するものであって前記第1の制御装置に結線される第1の液圧センサと、前記マスタシリンダ内の圧力を計測するものであって前記第2の制御装置に結線される第2の液圧センサと、を装備したことを特徴とする。
(もっと読む)
車両制御装置
【課題】 車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御が行える車両制御装置を提供する。
【解決手段】 車輪の回転速度を検出する回転検出装置1と、その出力信号から車両移動量を検出する車両移動量検出手段16とを設ける。車両と対象物との間の離間距離を非接触で計測するレーザレーダ等の離間距離測定手段14を設ける。離間距離測定手段14で検出された離間距離と車両移動量検出手段16で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段17を設ける。
(もっと読む)
21 - 40 / 123
[ Back to top ]