
Fターム[3D246GB34]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351) | 車間距離制御 (123)
Fターム[3D246GB34]に分類される特許
41 - 60 / 123
加速度制御装置
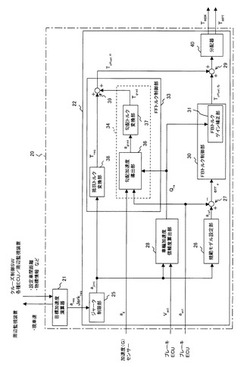
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
ブレーキ制御装置

【課題】ブレーキストロークセンサを持たないシステムで圧力センサの異常を検出できるブレーキ制御装置を提供する。
【解決手段】マスタシリンダM/CとホイルシリンダW/Cを含むブレーキ回路のブレーキ液圧を検出する圧力検出手段を有し、検出された圧力を用いてホイルシリンダ圧を制御するブレーキ制御装置において、圧力検出手段は、マスタシリンダM/Cの圧力を検出する圧力センサ33と、マスタシリンダM/CとホイルシリンダW/Cとの間のP系統のブレーキ液圧を検出する圧力センサ34と、P系統と独立したS系統のブレーキ液圧を検出する圧力センサ35と、を備え、3つの圧力センサ33,34,35の検出値P1,P2,P3を比較して3つの圧力センサ33,34,35の異常を判定する異常判定部32aを備えた。
(もっと読む)
車両制御装置
【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
先行車追従制御装置および先行車追従制御方法
【課題】 ドライバのブレーキ操作による目標車間距離の変更に伴う車両挙動変化を抑制でき、ドライバに与える違和感を軽減できる先行車追従制御装置および先行車追従制御方法を提供する。
【解決手段】 先行車追従制御装置は、ドライバのブレーキ操作量を検出するブレーキ操作量検出センサ4と、追従制御中に所定量以下のブレーキ操作量が検出された場合、エンジンブレーキによる減速度以下の減速度を発生させる追従制御装置5とを備える。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
隊列走行制御システム
【課題】隊列を構成する各車両の走行性能を反映させた走行制御により、スムーズな隊列走行を実現することができる隊列走行制御システムを提供する。
【解決手段】隊列走行制御システム1は、複数の車両が隊列を形成するように車両の走行制御を行う隊列走行制御システムであって、各車両の加速度指令値u1〜u5は、評価関数Jを最小にするように決定され、評価関数Jは、車両間の相対関係に関する値と、車両ごとにそれぞれ重み付けεu1〜εu5がされた各車両の目標加速度指令値u1〜u5に関する値と、に基づいて算出され、上記重み付けεu1〜εu5は、それぞれの車両の加減速応答性を示す時定数T1〜T5に応じて決定される。
(もっと読む)
車両用制御ペダル装置
【課題】車両の乗員のペダルへの踏み込み動作に先立ってその動作を検知して車両の各種制御に用いる。
【解決手段】車両用制御ペダル装置は、静電容量センサ部10と制御部20とを備え、さらに走行制御部32、通信制御部33および点灯制御部34を有する。静電容量センサ部10は、車両のブレーキペダルのペダルパッド1に楕円平板状に形成されて配置されたセンサ電極11と、このセンサ電極11の裏面側に形成されたシールド電極12と、センサ電極11を囲うように形成された補助電極13とを備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、ペダルパッド1上に検知範囲Zを形成して足70が検出された場合に、ペダルパッド1を踏み込むに先だって制御部20によって車両の制御信号が出力される。
(もっと読む)
追従走行制御装置
【課題】先行車に追従して自車を減速停止する際に、車間距離が長くならず、急減速によってドライバに不快感を与えることもない理想的な減速停止を実現する。
【解決手段】先行車の減速停止に追従して自車1が停止するときに、制御ECU7により、最初は、第1減速演算手段が演算する減速度に基づき自車1を十分に減速し、つぎに、第1減速演算手段の減速度と第2減速演算手段の減速度とを重み付け加算した第3減速演算手段の減速度に基づく減速制御に移行し、自車1の減速度を少しずつ小さくして自車1が停止したときの車間距離が第1減速演算手段の減速度で停止する場合より短くし、先行車に追従して自車1が減速停止する際の車間距離が長くならないようにするとともに、急減速を防止してドライバに不快感を与えないようにする。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】急激な制動制御を予測することで、ロック機構を適切に解放することが可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1及び第2のモータジェネレータと、係合機構と、プリクラッシュセーフティ装置と、制御手段と、を備える。制御手段は、係合機構の係合時に、プリクラッシュセーフティ装置からの情報に基づき、ブレーキ制御の実行前に係合機構の解放を行う。
(もっと読む)
車両用制御装置
【課題】この発明は、ヨーレートセンサの値を学習補正する場合において、精度の高い学習補正を常に実施でき、学習補正の精度を高めることで、精度の高い自車線の推定が可能な車両用制御装置を提供することを目的とする。
【解決手段】この発明は、ヨーレートセンサの値を、車両の走行安定性を保つための制御に利用する第1の制御装置と、前記ヨーレートセンサの値を、車両の制御に利用する第2の制御装置とを備えた車両用制御装置において、前記ヨーレートセンサが計測した値を、学習補正した値に補正する学習手段を備え、前記学習手段により学習補正した値を用いて、前記二つの制御装置はそれぞれの制御を行い、前記学習手段は、車両の状態に応じて、前記第1の制御装置、あるいは第2の制御装置のどちらか一方を用いて学習補正を実施することを特徴とする。
(もっと読む)
運転不全状態検出装置及び運転不全状態検出方法
【課題】自車両周囲のリスクに対する必要な警報を抑制することなく、運転者の不全状態を検出する運転不全状態検出の技術を課題とする。
【解決手段】自車両周囲のリスクに応じたリスク回避のための処理に対する、運転者のリスク回避行動の状況に基づき運転者の運転不全度合を検出する。そして、検出した運転不全度合に基づき運転者に運転不全に係わる報知を行う。
(もっと読む)
車両の乗客監視装置
【課題】車室内における座席に着座していない乗員の状態を識別し、乗客の年齢等の識別信号によって、座席に着座していない乗員の年代に対応した状態を検知し、かかる識別信号に対応した運転制御ができる車両の乗客監視装置を提供する。
【解決手段】車両の車室内における乗員の動きを検知して、車両内の乗員の状況を監視する車両の乗客監視装置において、前記車室内における乗員の状況を検知する乗員状態検知装置と、該乗員状態検知装置からの乗員状況検知信号を受信して該乗員状況検知信号から座席に着座していない乗員を識別すると、該乗員識別信号を表示警報装置を介して運転者に検知させるとともに、前記車内の不安定状態を識別するとエンジン制御装置及びブレーキ制御装置をそれぞれ制御して前記車両の走行状態を加減する制御装置とを備える。
(もっと読む)
電動パーキングブレーキシステム
【課題】乗員が誤って車両を発進させようとした場合であっても制動機構の制動状態を解除させないようにして安全性を向上させた電動パーキングブレーキシステムを提供する。
【解決手段】本発明の電動パーキングブレーキシステムは、車両30の車輪2を制動する制動機構4と、この制動機構を作動させる電動アクチュエータ6と、所定の発進条件が成立したときに電動アクチュエータを作動させて制動機構の制動状態を解除する制御ユニット8と、乗員の視線の方向をモニタするインナカメラ10と、を有し、インナカメラにより乗員が前方を向いていないと判断されたとき、制御ユニットは、所定の発進条件が成立しても、制動機構の制動状態を解除しないようになっている。
(もっと読む)
車間距離検出装置および車速制御システム
【課題】超音波を用いた車間距離検出装置において、計測の精度を向上させる。
【解決手段】自車200の前部に設置され、先行車300に対して超音波Sを送信するとともに、先行車300で反射して戻った超音波S′を受信する超音波送受信機10と、超音波Sが超音波送受信機10から送信されてから、反射波としての超音波S′が受信されるまでの経過時間ΔTを計時する計時手段30および経過時間ΔTに基づいて先行車300との間の車間距離Lを算出する距離演算部50を有する距離算出装置20と、を備え、距離算出装置20は、反射波として受信した超音波S′のうち、路面(500)から反射して受信したノイズ成分(S2′)を除去するノイズ信号除去手段40を備え、距離演算部50は、ノイズ信号除去手段40によって除去された後の超音波S′についての経過時間ΔTに基づいて、車間距離Lを算出する。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】
車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、車間制御ECU20がACC制御を実行しているときに、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に車間制御ECU20は、運転者のアクセル操作があったときは加速抑制制御を続行し、当該アクセル操作後に再度のアクセル操作があり、運転者が居眠りや意識低下の状態にないことが明らかであるときは加速抑制制御を解除する。これにより、安全性を確保しつつ運転者に与える違和感を軽減することができる。
(もっと読む)
ブレーキ制御装置
【課題】コストを抑制しつつ、滑らかなブレーキ制御を実現する。
【解決手段】制御周期が異なる複数のモジュールを備えるブレーキ制御装置において、第1モジュールは、第1制御周期で第1制御目標値を出力する。第2モジュールは、第1モジュールから出力された第1制御目標値にもとづいて第2制御目標値を第1制御周期より短い第2制御周期で演算する。目標変化値算出手段は、第1制御目標値が更新された場合、第1制御目標値にもとづいて新たな目標変化値を算出し、第1制御目標値が更新されなかった場合、前回算出された目標変化値を新たな目標変化値とする。第2制御目標値算出手段は、第1制御周期と第2制御周期との基本周期比をもとに調整された調整周期比によって新たな目標変化値を補正し、補正された目標変化値にもとづいて新たな第2制御目標値を算出する。
(もっと読む)
車両制御装置
【課題】より快適な運転フィーリングを実現することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両に制動力を作用させて制動を行う制動手段6aと、車速を設定車速以下に制限するよう制動手段6aを制御する制限手段3aと、車速を検出する車速検出手段3bと、ブレーキペダルの踏み込み量を検出する踏み込み量検出手段6bと、車両の前方に位置する先行車両の有無及び先行車両との車間距離を検出する車間距離検出手段3cと、制限手段3aが制限を実行して、踏み込み量が所定量以内で、車間距離検出手段3cが先行車両は無いと検出して、車速が設定車速に対して所定速度以内となった場合に、制限手段3aの制御に基づいて制動手段6aが制動力を低下させることを特徴とする。
(もっと読む)
走行制御装置
【課題】追従走行時においてブレーキに即時対応できる状態を運転者に維持させることができる走行制御装置を提供する。
【解決手段】走行制御装置1は、ECU2を備えている。ECU2には、ブレーキペダル11と運転者の足との接触を検出するタッチセンサ3、ナビゲーションシステム5、及びカメラ8が接続されている。ECU2は、ナビゲーションシステム5及びカメラ8から送出されたそれぞれ道路情報及び画像信号に基づいて走行環境を判定する。そして、ECU2は、自車両が狭路を走行していたり、自車両の前方に障害物が存在しているという環境にある場合に、タッチセンサ3によってブレーキペダル11と運転者の足との接触が検出されていることを条件として、自車両を先行車両に追従走行させるようにエンジン制御部9及びブレーキ制御部10に制御信号を送出する。
(もっと読む)
41 - 60 / 123
[ Back to top ]