
Fターム[3D246GB34]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | クルーズコントロール (351) | 車間距離制御 (123)
Fターム[3D246GB34]に分類される特許
61 - 80 / 123
操舵支援装置
【課題】隣接車両の回避時に操舵支援制御を継続しつつ運転者の操舵入力との干渉を低減した操舵支援装置を提供する。
【解決手段】走行車線内の目標走行位置(Xc,Z)を自車両が走行するよう操舵機構10へ操舵トルクτを付与する操舵支援装置において、自車両前方の環境を認識する環境認識手段110と、目標走行位置を設定する目標走行位置設定手段130と、隣接車両を検出する隣接車両検出手段140と、隣接車両の自車両に対する接近度を算出する接近度算出手段150と、運転者による操舵方向及び入力トルクを検出する操舵操作検出手段160と、自車両が目標走行位置を走行するよう操舵機構へ操舵トルクを付与する操舵制御手段190とを備え、操舵制御手段は、操舵方向が隣接車両から遠ざかる方向である場合、接近度及び入力トルクに応じて隣接車両へ近づく方向への操舵トルクを低減する構成とする。
(もっと読む)
車速制御装置

【課題】運転者の感覚に合った走行が可能な適切な目標車速に変更できる車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて車両の車速を制御する車速制御装置であって、運転者の特性を推定する運転者特性推定手段と、走行中の道路形状を取得する道路形状取得手段と、運転者特性推定手段で推定した運転者の特性と道路形状取得手段で取得した道路形状に基づいて目標車速を変更する目標車速変更手段とを備えることを特徴とする。
(もっと読む)
自動車両制動装置
【課題】自動制動時の制動初期における制動の安定性を図ることができる自動車両制動装置を提供すること。
【解決手段】前輪6はディスクブレーキ31により制動可能に設けられ、後輪7はドラムブレーキ35により制動可能に設けられる車両1に、前輪6の制動力を検出可能な前輪前後力センサ55を設ける。自動制動制御部で自動制動制御を行う際には、前輪前後力センサ55で前輪実制動力を検出し、ドラムブレーキ35の制動力が不安定な期間は前輪前後力センサ55による検出結果のみで制動力のフィードバック制御を行う。これにより、制動力が不安定な期間におけるドラムブレーキ35の制動力は、ディスクブレーキ31及びドラムブレーキ35の油圧の制御には反映されないため、不安定な制動力がフィードバックされることに起因して制動力が不安定になることを抑制できる。この結果、自動制動時の制動初期における制動の安定性を図ることができる。
(もっと読む)
自動車両制動装置
【課題】自動制動時における制動の安定性を図ることができる自動車両制動装置を提供すること。
【解決手段】前輪6はディスクブレーキ31により制動可能に設けられ、後輪7はドラムブレーキ35により制動可能に設けられる車両1に、自動制動制御を行う際にはディスクブレーキ31に付与する油圧の調整のみで車両1の減速度の調整を行う自動制動制御部87を設ける。これにより、自動制動制御を行う場合にはドラムブレーキ35の制動力は調整しないので、制動力の制御が難しいドラムブレーキ35の制動力を調整することに起因して車両1の減速度が安定しなくなることを抑制できる。この結果、自動制動時における制動の安定性を図ることができる。
(もっと読む)
運転支援装置
【課題】運転者のシステムへの過信や依存を防止することが可能な運転支援装置を提供する。
【解決手段】レーダセンサ12が取得した他車両に関する指標及び車速センサ56が取得した車速に基づいて自車両の最終要求加減速度を取得し、最終要求加減速度に基づいて自車両の減速度を制御するブレーキ制御ECU42を備えるため、自車両周辺の他車両との相対関係や自車両の車速に基づいて自車両の減速度を制御することができる。また、ブレーキ制御ECU42は、取得した危険度である必要加減速度の大きさがKLMTよりも大きい場合に、自車両の運転者に違和感を与えるように自車両の減速度を制御するため、減速時に危険度が大きいときは、運転者は減速度の制御によって違和感を覚えることになり、当該違和感によって運転者のシステムへの過信や依存を防止することが可能となる。
(もっと読む)
ブレーキ制御システム
【課題】停車時に余分な消費電力と発熱を低減すると共に、スムーズな発進を実現し、発進と停止の切替え時に運転者の意図に反することのないブレーキ制御装置を提供する。
【解決手段】ブレーキペダルの操作量を電気信号で検出し、該電気信号から運転者の要求制動力を算出して発生させるブレーキ制御装置において、停車状態と判定された後、実制動力に対応する電気信号が停車時に発生させる停車時制御力指令値を超えていると判断された場合、制動力の制御モードを停車時制御モードに切替えること、及び、要求制動力が、前記停車時制動力指令値より小さくなったと判断された場合、制動力の制御モードを通常制御モードに切替えること、かつ、前記停車時制御モードで、ブレーキ手段で発生する制動力を停車保持制動力とし、前記通常制御モードでは、ブレーキ手段で発生する制動力を運転者の要求制動力とする。
(もっと読む)
車両発進補助装置
【課題】 スムーズな発進を行うことができる車両発進補助装置を提供する。
【解決手段】 ドライバのブレーキペダルBPの操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCU32と、車両に設けられた前輪FL,FRに駆動力を作用させるエンジン39と、ブレーキCU32によりホイルシリンダ液圧を減圧する際に駆動源の駆動力または回転数が所定の上下限値の間に収まるように制御する発進補助制御部41と、を備える。
(もっと読む)
車両制動装置
【課題】より快適なフィーリングを実現し、エネルギー効率の低下と燃費の悪化を招くことを防止することができる車両制動装置を提供すること。
【解決手段】本発明による車両制動装置1は、選択スイッチにより車両制御手段2cの動作が選択されて、減速指令がある場合に、ポンプ15が基礎油圧又は操作油圧を増圧して制御油圧を発生させる増圧制動処理を実行する制動処理手段5aを備えることを特徴とする。
(もっと読む)
車両用制駆動力制御装置
【課題】 ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供する。
【解決手段】 エンジン39の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルクを低減させる。
(もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
ブレーキ制御装置
【課題】液圧回路とホイールシリンダとをつなぐ接続系に弾性部材要素が含まれていても、液圧制御における良好な応答性を確保可能なブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置においては、ホイールシリンダ圧のフィードバック制御に際して接続通路内の液圧剛性の変化が考慮される。ブレーキECUは、設定対象となる制御ゲインがそれぞれ異なるように構成された複数の制御マップを保持し、リニア制御弁を通過する作動液の流量に応じて対応する制御マップを参照し、フィードバック制御の制御ゲインを設定する。
(もっと読む)
ブレーキ制御装置
【課題】 保持・減圧状態から増圧に切り替わる際の応答を改善したブレーキ制御装置を提供する。
【解決手段】 車両の状態に合わせてゲートアウト弁、ゲートイン弁、および前記ポンプを駆動することにより、自動ブレーキ制御を行うコントロールユニットを備え、コントロールユニットは、自動ブレーキ制御中、少なくともポンプを連続的に駆動することとした。
(もっと読む)
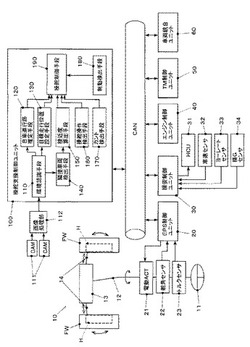
運転者援助システム
自動車用運転者援助システムでは、自動車(10)の走行速度(vk)の形の走行データを検出する走行速度検出装置(22)、自動車(10)の前を走行する先行車両(16)に対する間隔(A)の形の走行データを検出するため、第1の構成要素としての少なくとも1つのビデオカメラ(18)及び第2の構成要素としての少なくとも1つの間隔センサ(20)を含む先行車両検出装置(14)、先行車両(16)の先行車両速度(vVf)の形の走行データを検出する先行車両検出装置及び所定の制動開始走行データが存在すると自動車(10)の自発制動を開始し、所定の制動中止走行データが存在すると自動車(10)の自発制動を終了するために設けられている電気制御装置(28)を有する。
本発明によれば、電気制御装置(28)が、次の段階を持つ方法を実施するために、即ち先行車両(15)の先行車両走行データ(A,vVf)の冗長な検出を行い、先行車両走行データ(A,vVf)の冗長な検出が不可能になる場合、先行車両走行データ(A,vVf)の冗長でない検出を行い、冗長でなく検出される走行データを、所定時間(t)内に冗長に検出される先行車両走行データと比較し、冗長でなく検出される先行車両走行データが冗長に検出される先行車両走行データに一致する場合、段階(d)を実施するために冗長でなく検出される先行車両走行データを使用するために設けられている。
(もっと読む)
運転支援装置、運転支援方法
【課題】意識低下状態から覚醒状態に復帰した場合でも、車両挙動を安定化させることができる運転支援装置及び運転支援方法を提供すること。
【解決手段】運転者の覚醒度に応じて運転者を支援する運転支援装置100において、運転者が意識低下状態から覚醒した直後か否かに応じて、運転者を支援する車両制御の態様を可変にする、ことを特徴とする。
(もっと読む)
ブレーキ装置およびブレーキ装置の作動方法
ブレーキ装置の制御方法は、
ブレーキ装置によるブレーキ作用を設定するためのブレーキ信号を受け取るステップと、
前記ブレーキ作用を所定の応答時間内に与えるための、ブレーキ装置内の圧力上昇の最小速度を決定するステップと、および
ブレーキ装置内の圧力が前記最小速度で上昇するようにブレーキ装置のポンプのポンプ能力を設定するステップと、を使用する。
(もっと読む)
車両制御装置
【課題】ドライバの個人毎の好みに適合したタイミングで減速制御あるいは加速制御を実行することができる車両制御装置を提供する。
【解決手段】
自車の走行中に補正接近離間状態評価指標KdB_cを算出し、その補正接近離間状態評価指標KdB_cをその算出時の車間距離Dとともに運転者別に記憶装置60に記憶する。そして、記憶装置60に運転者別に記憶されている補正接近離間状態評価指標KdB_cの距離毎の最大値を求め(S10)、その最大値に基づいて、先行車との距離Dと距離毎の補正接近離間状態評価指標KdB_cの最大値との関係式を決定する(S20)。さらに、その関係式を補正することで、加減速制御の実行開始タイミングか否かを判別するための閾値を算出する速度制御開始判別式を決定する。
(もっと読む)
車速制御装置
【課題】
路面の凹凸による振動が車両のばね上と共振することを確実に回避して、車両の乗り心地性能の向上が図れる車速制御装置を提供すること。
【解決手段】
車両の車速を制御する車速制御装置1であって、路面の凹凸による振動が車両のばね上と共振することを避けるように車速を増減して車速制御する。これにより、車両のばね上共振が避けられるため、車両の乗り心地性能の向上が図れる。
(もっと読む)
車間距離制御装置及び車間距離制御方法
【課題】車間距離制御の極低車速域における停止制御の信頼性を向上させる。
【解決手段】先行車との車間距離を目標車間距離とする目標車速を演算し、その目標車速とするための目標制駆動力を演算する車速制御手段と、上記先行車との車間距離を確保しながら自車両を停止させるために必要な大きさの停止制動力を演算する停止制御手段と、を備える。先行車が停止状態であるときに、目標車速が所定車速閾値以下の場合に、上記目標制駆動力による制動から上記停止制動力による制動に切り換える。
(もっと読む)
車両の制動力制御装置
【課題】マニュアルブレーキ手段と自動ブレーキ手段とを具えた制動力制御装置がマニュアルブレーキ中に自動ブレーキを選択して実行する場合、運転者のマニュアルブレーキによる制動力の方が自動ブレーキによる制動力より小さくなって減速度抜けが発生することを防止し、マニュアルブレーキと自動ブレーキとの制動力差の時間変化率が大きい場合、自動ブレーキによる要求制動力の低減量を小さくして、マニュアルブレーキによる制動力よりも自動ブレーキによる制動力を大幅に高めてより素早い制動を実現する。
【解決手段】マニュアルブレーキによる制動力と自動ブレーキによる要求制動力とを比較し、該要求制動力の方が大きい場合は、自動ブレーキを選択的に作動させ、マニュアルブレーキによる制動力から自動ブレーキによる要求制動力を引いた値の単位時間当たりの変化量である制動力差時間変化率を求め、自動ブレーキによる要求制動力を低減させるとともに、求めた制動力差時間変化率が大きいほど要求制動力の低減量を小さくする。
(もっと読む)
車両の障害物検知装置
【課題】障害物検知手段の検知状態に応じて作動機器を制御する車両の障害物検知装置において、障害物認識の早期化、及び障害物に対する作動機器の制御実行の早期化を図る。
【解決手段】障害物が検出されたか否か判定を行い(S21)、前方ミリ波レーダ3で検知された障害物が後方ミリ波レーダ4で検出された障害物と一致するか判定を行う(S22)。前記障害物が一致しない場合はS23に移行し、一致した場合は直ちにS24へ移行してPCS制御を開始する。S23で、検知された障害物が所定回数連続して検知されたものか判定する。定回数以下、或いは初めて検知されたものであれば、電磁波ノイズによる障害物の誤検知の可能性があるため、再度障害物を検知するためS21に戻る。S24以降は、前述したPCS制御が実行される。
(もっと読む)
61 - 80 / 123
[ Back to top ]