
Fターム[3D246GC16]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 自動ブレーキ時 (520)
Fターム[3D246GC16]に分類される特許
501 - 520 / 520
ドライバーアシストシステム
本発明はパラメータによって定められる複数のアシスト機能を有するドライバーアシストシステムに関する。本発明によれば、ドライバーアシストシステムは可変のパラメータによって適応化可能に構成されている。  (もっと読む)
(もっと読む)
トレーラの揺れ軽減のための閉ループ制御

車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。 (もっと読む)
外部から作動可能な電気流体圧の車両ブレーキシステム

【解決手段】この発明は、スリップ制御を備えた外部から作動可能な電気流体圧車両システム有する外部から動作可能な電気流体圧車両ブレーキシステムに関する。吸入路における絞り効果なしに、悪影響とは逆に、特にマスタシリンダを介して、非常に強力な圧力増強プロセスが可能であるブレーキシステムを利用可能にするために、流体圧ポンプ(21、22)が、流体圧ポンプ(21、22)の入口(E)に接続される流体圧の充填装置(29)を駆動することができる手段をさらに割り当てることが、提案されている。 (もっと読む)
下り坂の運転中に自動車両の制動を制御するシステム及び方法
下り坂運転中に自動車両の制動を制御するシステムであって、車両が常用摩擦制動装置18と、リターダ・ブレーキ26及び車両の運転者によってリターダ・ブレーキを始動させるためのレバー40を備える補助制動装置25とを含むシステムが、車両の運転条件のパラメータの値に基づいて、下り坂運転時に車両に制動作用を適用するために、運転者がレバー40を作動させることによりリターダ・ブレーキ26を始動させる際に、補助制動装置のみで車両に適用される制動作用を得ることができるかどうかを計算するように適合されている手段29を含む。その計算が補助制動装置のみでは車両に適用される制動作用を得ることができないことを示す場合に、制動制御手段28が、補助制動装置を助けるために常用摩擦制動装置を始動させるように適合されている(図1)。 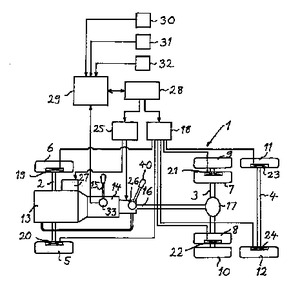 (もっと読む)
(もっと読む)
車両の制動方法
【課題】常用制動装置の比較的僅かな摩耗で、車両の効果的な制動を行う。
【解決手段】常用制動装置の作動量(B)が検出され、目標運動量(SBW)に達するため、車両の縦加速度の減少を必要とする実際運動量(IBW)と目標運動量(SBW)との運動量偏差があると、作動量(B)及び実際運動量(IBW)と目標運動量(SBW)との運動量偏差(ΔBW)に関係して、付加的に常用制動装置が車両の縦加速度を減少するように動作せしめられる。
(もっと読む)
線形誘導モーターを備える個別用高速輸送システムにおける制御及び安全制動方法及び装置
一つ以上のモーターを含む車両推進システムを含む個別用高速輸送システムにおける一つ以上の車両がトラックに沿って移動するとき、前記一つ以上の車両の車両速度を制御するための速度制御システムであって、それぞれのモーターは前記一つ以上の車両の中で一つの車両を推進するための推力を生成するようになり、個別用高速輸送システムにおける車両速度を制御するための速度制御システムは、前記一つ以上の車両の前記車両速度を制御するように、車両位置及び/または速度センサーから受信した一つ以上のセンサー信号に基づいて前記モーターの中で少なくとも一つのモーターによって生成された前記推力を制御するようになる速度調節サブシステム、及び前記一つ以上の車両の中でそれぞれの車両内に含まれて、前記速度調節サブシステムによる車両速度制御とは無関係に、前記車両上に装着された非常ブレーキを作動させるようになる車両制御システムを含む。 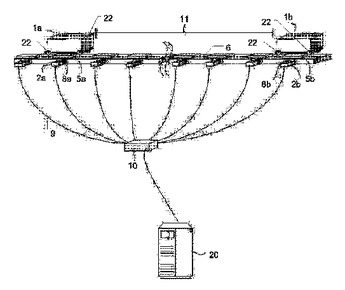 (もっと読む)
(もっと読む)
車両用走行制御装置
【課題】自車両前方の物体との相対位置関係に基づいて自車両の走行を制御する走行制御手段を備えた車両において、自車両前方の物体を認識するセンサに検出範囲が変化する衝撃が加わった場合に、安全走行を確保する。
【解決手段】衝突回避判断手段の判断結果に基づいて自車両を自動制動制御する自動制動制御の終了後、衝突回避判断手段が衝突回避不可能と判断した結果に基づいて、自動制動制御手段による自動制動制御、又は走行制御手段による走行制御が作動され難くなるように作動条件を変更する。
(もっと読む)
車間距離制御型定速走行装置
【課題】先行車の減速や他車の割り込みによって車間距離が急に減少した場合でも、先行車へ接近し過ぎないように制御する。
【解決手段】警報の発令状況、車間距離制御の解除操作状況および車両の操作量に基づいて、警報発令条件および/または車間距離制御開始条件を変更する。これにより、運転者ごとの好みや癖、あるいは運転経験に合わせた最適なタイミングで警報を出すことができ、先行車へ接近し過ぎるのを防止できる。
(もっと読む)
車線逸脱警告装置及び方法
車両車線逸脱警告装置及び方法は、運転者に触覚のフィードバックを提供するために車両ブレーキ装置を使用する。1つの実施形態では、車両のかじ取り可能な路面車輪の1つにブレーキがかけられ、車両のかじ取りハンドルに力を伝達させ、運転者がかじ取りハンドルを介して触覚のフィードバックを受ける。 (もっと読む)
ブレーキ装置内に設定可能な終端圧力を再現可能に発生させるための方法および装置
ブレーキ回路の少なくとも1つ部分内に設定可能したがって再現可能な終端圧力を達成させるために、はじめに、弁(18)が閉鎖されているとき、圧力を上昇ないしは低下させるためにポンプ(26)が操作される。第1の所定の目標圧力が到達されたとき、ないしは圧力しきい値が超えられたとき、前記弁(18)は第1の操作により開放位置に移動される。本発明により、ポンプ(26)が遮断されたのちに、前記弁(18)の操作は、設定可能な時間の間、第1の操作から第2の操作への連続的な変化が行われ、この変化において、特に弁(18)にかかっている圧力差を考慮しながら弁(18)が保持位置をとるように、前記弁(18)の操作が修正される。 (もっと読む)
自動車における停止保持機能の実行方法および装置
本発明は、
− 弁(USV、303)が第1の操作方法(401)により操作され、
− ブレーキ回路の所定領域(111)がブレーキ圧力損失(406)の発生に関してモニタリングされ、および
− ブレーキ圧力損失が検出されたとき、弁(USV、303)が第2の操作方法(405)により操作される、
自動車におけるブレーキ回路の所定領域(111)内ブレーキ圧力を保持するための弁(USV、303)の操作方法に関するものである。
(もっと読む)
走行速度調整システムを装備した自動車の運転者を警告するための方法
本発明は、間隔に関連した走行速度調整システムが装備されている自動車の運転者を警告するための方法に関し、この方法では、間隔に関連した走行速度調整中、間隔に関連した走行速度調整システムにより生じさせられた制動モーメントを用いて自動車が停止状態に保持され、また自動車を離れるために運転者が自動車を離れること又は運転者の離れる意図が認識可能である。本発明に従い、運転者の離れることを認識した場合又は運転者の離れる意図を認識した場合、自動車が運転者にとって知覚可能な運動をこうむるように前記の生じさせられた制動モーメントが変更又は調節される。 (もっと読む)
制動システム
制動機(12)、制動を実行するため制動機(12)に力を加えるよう操作できる制動機アクチュエータ(14)、自動制動制御器(16)、および手動で操作できる制動機アクチュエータ制御装置(18)を含む制動システム(10)であって、制動機アクチュエータ制御装置(18)が、解除位置と作動位置の間で移動可能であり、かつ解除位置から作動位置への使用者による制御部品(22)の移動により制動機アクチュエータ(14)が制動機(12)を作動させ、作動位置から解除位置への使用者による制御部品の移動により制動機アクチュエータ(14)が制動機(12)を解除するように適合された手動で操作できる制御部品(22)を含み、制動機アクチュエータ制御装置(18)が、さらに、制御部品(22)と係合し自動制動制御器(16)からの適切な信号の受信と同時に解除位置から作動位置への制御部品(22)の移動を実行するように適合された制御アクチュエータ(26)を含むことを特徴とするもの。 (もっと読む)
車両運転補助方法および改良型関連装置
本発明は、対象物感知検出器を備え、以下のステップを含む車両運転補助方法に関する。これらステップは、検出対象物の運動学的パラメータのフィールドのN個のセルへの分割化に対応する占有グリッドを定義するステップと、各時間kで検出器によって生成された観測値zkを取得し、その挙動をモデル化する検出器確率を決定するステップと、先行する時間でのグリッドの推定占有密度を認識し、セルXが時間kで占有状態である確率をもたらす予測占有確率を各セルXに対して計算するステップと、検出器確率および予測占有確率を用意して推定占有確率を各セルXに対して計算するステップであって、時間kで予測占有確率がグリッドの単一のセルが時間k−1で関与するセルXに先行するセルを構成すると仮定して決定されるステップと、各セルXに対して時間kでの推定確率に基づいて衝突確率を評価するステップと、対象物を回避するために信号を発信するステップとを含む。 (もっと読む)
タイヤ監視システム
本発明は、タイヤ内に取り付けられた遠隔タイヤ監視ユニットと、中央コントローラと、音声指示ユニットと、ブレーキ減速機構体とを含み、遠隔タイヤ監視ユニットは、タイヤ内の空気圧および温度を監視し、サンプリングして、中央コントローラに後に無線で送信されるタイヤ条件のサンプリング・データ信号を生成するのに使用され、中央コントローラは、タイヤ条件のサンプリング・データ信号を無線で受信し、受信されたデータ信号を計算して、音声指示命令および/またはブレーキ減速命令を生成するようにし、その後、その音声指示命令を音声指示ユニットに伝送する一方で、ブレーキ減速命令をブレーキ減速機構体に伝送し、音声指示ユニットは、前記音声指示命令を受信して、音声指示情報を出力するように提供され、ブレーキ減速機構体は、前記ブレーキ減速命令を受信し、ブレーキ減速の動作を実行して、急速な空気の抜けおよびタイヤ破裂が突然に生じた際に、効果的なセキュリティ保護を短い時間の内に提供するようにするタイヤ監視システムを提供する。 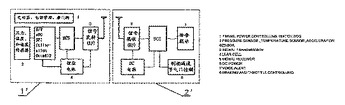 (もっと読む)
(もっと読む)
駐車支援装置および駐車支援方法
本発明は車両用の駐車支援装置および駐車支援方法に関する。本発明では走行区間が始点から終点までの道程として記憶される。続いて車両が記憶された走行区間に沿って自動ガイドされる。  (もっと読む)
(もっと読む)
車両の走行動特性制御装置及び方法
この発明は、トルク配分機器内でヨーイングトルク要求に応じて算出することが可能な制動トルクを車両の少なくとも一つの車輪ブレーキに設定することが可能なブレーキ用アクチュエーターを有する電子制動システムと、臨界的な走行状態の発生時に作動させることが可能な第一の制御ユニットであって、第一のヨーイングトルク要求を走行動特性制御にもとづき算出することが可能である第一の制御ユニットとを備えた、車両の走行動特性を制御する装置に関する。この装置は、管理機器(12)が、臨界未満の走行状態の発生時に作動させることが可能な第二の制御ユニットを有し、この第二の制御ユニットを用いて、第二のヨーイングトルク要求(R:D_GM)を走行動特性制御にもとづき算出することが可能であり、この第二のヨーイングトルク要求(R:D_GM)をトルク配分機器(20)に伝えることが可能であることと、第一の制御ユニット(4)が動作している状態では、第二の制御ユニットを停止させるための信号(I:EBS_Status;R:D_GM;R:[S1,S2,...])を電子制動システム(2)から管理機器(12)に伝えることが可能であることとを特徴とする。更に、この発明は、車両の走行動特性を制御する方法に関する。  (もっと読む)
(もっと読む)
車両内のセーフティシステムのための方法
本発明は、車両内のセーフティシステムのための方法に関する。この方法によれば、周囲センサシステムからの周囲に関するデータが、差し迫る障害物との衝突に関して連続的に評価され(1)、衝突が避けられない場合には、自動非常制動が始動される(6)。本発明によれば、非常制動は、予め定義された事象が発生するまで維持される。予め定義された事象は、センサによって実際に検出された、衝突又は事前に計算された衝撃(7)までの終了時間(11)であり得る。  (もっと読む)
(もっと読む)
制御可能なブレーキ装置による自動車の制御方法
本発明は、4つの車輪のブレーキを個別に制御することが可能なブレーキ装置による、自動車の方向の制御方法に関する。本発明の制御方法は、少なくとも自動車の同じ側に取り付けられた前輪(6a)及び後輪(6c)のブレーキを作動させることを特徴とする。ブレーキの作動は、特に、ステアリングホイールに加えられるトルクとステアリングホイールの角度位置の少なくとも一方を含むステアリングホイールに関するデータと、自動車の速度との、少なくとも一方に応じて指令される。  (もっと読む)
(もっと読む)
車両を安定させるための装置及び方法
本発明は車両の横方向の運動を表す、横方向の運動変数の実際値を決定するために備えられた検出装置(10)を含み、横方向の運動変数のための目標値を決定し、横方向の運動の目標値が決定されたしきい値を超えた場合に、所定の安定条件に従って該決定されたしきい値を定義する評価ユニット(11)を含む、車両を安定させるための装置及び方法に関する。該評価ユニット(11)は決定された実際値と、横方向の運動変数に対する決定され場合によっては制限される目標値との比較に応じて、車両の運転安定性が増加するような方法で、車両の長手方向及び/又は横方向の運動に影響を与えるために設けられた車両のユニット(12)を作動させる。横方向の運動変数は車両の傾き角を表す傾き角変数、及び/又は車両の車輪に生じるスリップ角を表すスリップ角変数を有する。  (もっと読む)
(もっと読む)
501 - 520 / 520
[ Back to top ]