
Fターム[3D246HB07]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 路面状態 (664) | 路面傾斜 (285)
Fターム[3D246HB07]の下位に属するFターム
上り坂、下り坂 (159)
Fターム[3D246HB07]に分類される特許
1 - 20 / 126
車両のパーキングロック制御装置
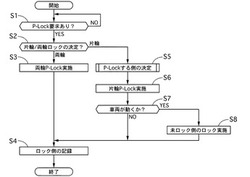
【課題】 電力消費を抑制可能な車両のパーキングロック制御装置を提供すること。
【解決手段】 本発明の車両のパーキングロック制御装置では、パーキングロック作動指令が出力されたときは、複数のパーキングロック機構のうち、何れか一方のパーキングロック機構を作動させ、一方のパーキングロック機構のみを作動させた場合に車両が移動すると推定又は検出されたときは、他方のパーキングロック機構を作動させることとした。
(もっと読む)
エンジン再始動制御装置

【課題】車両のエンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまではブレーキ圧を保持する場合に、車両の飛び出し感及びブレーキの引きずり感の防止を図ることである。
【解決手段】時刻t3のブレーキ保持圧は所定圧M2より大きいので、減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧アクチュエータと、統合コントローラとを備え、統合コントローラは、停車時モータオフ制御部と、昇圧勾配制限部とを有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータを停止し、車両停止中、VDCモータの停止状態を維持したままとする。昇圧勾配制限部は、車両停止状態からの車速発生により停車時モータオフ制御を終了するとき、ドライバのブレーキペダルリリース前の目標減速度と、そのときのホイールシリンダ圧による実減速度と、の差異が大きくなるほど、VDCモータの作動再開に伴うホイールシリンダ圧の上昇勾配を小さくする。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段2と、自車両の位置を取得する自車位置取得手段3と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段4と、を有し、車両運動制御演算手段4は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算し、前記前後加速度指令値は、自車両前方のカーブ走行時に発生するであろう最大横加速度推定値、自車両前方の道路勾配、ドライバのペダル操作、旋回方向のうちの少なくともいずれか一つに基づいて変化する。
(もっと読む)
車両のパーキングロック制御装置
【課題】 電力消費を抑制可能な車両のパーキングロック制御装置を提供すること。
【解決手段】 本発明の車両のパーキングロック制御装置では、パーキングロック作動指令が出力されたときは、いずれか一方のパーキングロック機構を作動させると共に、推定又は検出された車両の移動が所定以上移動するときは、他方のパーキングロック機構に接続されたモータにより車両の移動を抑制するトルクを発生させることとした。
(もっと読む)
アイドリングストップシステムおよびアイドリングストップの方法
【課題】車両のアイドリングストップからのエンジンの再始動時にヒルスタートアシストを低コストで円滑に行えるアイドリングストップシステムおよびアイドリングストップの方法を提供する。
【解決手段】アイドリングストップシステムは、車両の走行停止状態において原動機4を停止および再始動するアイドリングストップシステムであって、ブレーキペダルの操作によって発生した制動力を少なくとも一時的に保持する制動力保持制御を実行する制動制御装置6と、ブレーキペダルの操作中において、所定の再始動条件が成立した際に停止中の原動機4を再始動する原動機制御装置4Eと、原動機4の再始動に先立って制動制御装置6の作動条件を一時的に緩和する作動条件緩和手段6とを備える。
(もっと読む)
車両用ブレーキ制御装置
【課題】EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにする。
【解決手段】車速が0になって車両が停止したときに、ピッチングによりGセンサ21のGセンサ値が変動しても、その変動波形の振幅のーク値に沿って目標制動力が更新されるようにしている。これにより、Gセンサ値に基づいて設定される目標制動力をより路面勾配に対応する値に近づけることが可能となる。このため、EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにできる。
(もっと読む)
ブレーキ制御装置
【課題】坂道での車両の走行安全性を高めることができるブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、傾斜センサ24による坂道の検出、ブレーキセンサ23によるブレーキのオン状態の検出がなされた場合、ブレーキ制御ECU30は、制動力発生手段21を作動させるとともに、作動インジケータ41を点灯させる。その後、制動力発生手段21の作動中、ブレーキのオフ状態が検出された場合、ブレーキ制御ECU30は、制動力発生手段21の作動及び作動インジケータ41の点灯を継続させる。その後、ブレーキ制御ECU30は、作動インジケータ41を点滅に切り替える。その後、ブレーキ制御ECU30は、制動力発生手段21の作動を解除する。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車両の発進を禁止した後に、アクセルペダルの操作に基づいて発進禁止を解除する技術において、発進禁止を解除してよい場面をより適切に検出する。
【解決手段】アクセルペダル誤操作であると判定したことに基づいて、車両の発進を禁止し、発進が禁止されているとき、解除操作が行われたか否かを判定し、解除操作が行われたと判定したことに基づいて、車両の発進禁止を解除するアクセルペダル誤操作対応装置において、誤操作と判定されたアクセルペダル操作の後(ステップ210)、待機時間経過後に操作量が誤操作判定閾値を超えない範囲でアクセルペダルが再操作されたことに基づいて(ステップ220、230、240)、解除操作が行われたと判定する(ステップ250)。
(もっと読む)
ブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置
【課題】マスタシリンダ内の圧力を検出するための圧力センサを用いることなく、運転手によるブレーキペダルの踏力が高いか否かを判定することができるブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えた時点での車体減速度の変化勾配DDVを第1変化勾配DDV1とし(ステップS86)、Gセンサ値Gが第2の減速判定値G_stを超えた場合に取得された車体減速度の変化勾配DDVを第2変化勾配DDV2とする(ステップS89)。ブレーキ用ECUは、第2変化勾配DDV2が第1変化勾配DDV1以上である場合(ステップS90:YES)に、運転手によるブレーキペダルの踏力が高いと判定する。
(もっと読む)
電動パーキングブレーキ装置
【課題】運転者のアクセルペダルの操作を速やかに認識し、スロットルバルブの開き始めにおいて、車両の引きずり現象や発進直後の制動ショックを低減する電動パーキングブレーキ装置を提供する。
【解決手段】アクセルペダル操作量信号APSを用いてスロットルバルブの開き始めのタイミングに電動パーキングブレーキを解除する代わりに、アクセルペダルが踏み込まれていない時刻t1のタイミングでのアクセルペダル操作量信号APSを取得して、基準アクセルペダル操作量信号APS*とし、その後は、アクセルペダル操作量信号APSと基準アクセルペダル操作量信号APS*との比をアクセル操作係数KACとし、アクセル操作係数KACが閾値KAC*以上になったタイミングで電動パーキングブレーキを解除する。
(もっと読む)
車両制御装置
【課題】減速中にエンジンに対する燃料の供給を停止し、かつエンジンと駆動輪との動力の伝達を遮断する場合の制動力の変動を抑制することができる車両制御装置を提供すること。
【解決手段】エンジンと、開放することによってエンジンと駆動輪との動力の伝達を遮断するクラッチと、制御可能な制動装置と、を備え、減速時にエンジンを停止(S4)し、かつクラッチを開放する(S3)ときに、制動装置が発生する制動力を減少させる(S5,S6)。
(もっと読む)
走行支援装置
【課題】車両の後退時において、障害物と車両との距離が至近距離となった場合でも、より精緻に車両の走行を制御することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12を有し、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、障害物Oaがソナー12により検知不可能な範囲に接近したときは、ソナー12により障害物Oaを検知可能であった位置からの車両11の走行距離に基づいて推定される障害物Oaとの距離に基づいて車両11の走行を制御する。障害物Oaが接近し過ぎてソナー12により検知不可能な範囲に入ってしまい、障害物Oaをロストしてしまった状況でも、障害物Oaとの距離を推定し、推定された距離に基づいて障害物Oaとの接触を防止することができる。
(もっと読む)
走行支援装置
【課題】ドライバーの要求により合致し、ドライバーの装置のシステムへの過信を防止することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12と、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、後退時に障害物Oaとの接触を防止するようにドライバーの操作によらずに車両11の速度の制限及び減速の減速制御又は停止制御を行ない、その後に減速制御等の操作量を小さくする。このため、車両11が障害物Oaに対して減速された後に、ドライバーがさらに障害物Oaに接近したい等の理由で車両11を加速させたい状況に対応することができ、いつまでも車両11が障害物Oaに対して減速させられて、ドライバーがシステムを過信することを防ぐことができる。
(もっと読む)
リターダの制御装置、車両およびリターダ制御方法、並びにプログラム
【課題】走行条件に係らず補助ブレーキとしての機能を充分に発揮させ、ECUの共通化を図ること。
【解決手段】リターダの動作中に生じる自車両の減速度を計算する補助ブレーキ力計算部71および減速度計算部72を有し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも小さいときには、所定の閾値を、放熱手段(ドラム)の回転速度の変化に対応させて可変的に設定し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも大きいときには、所定の閾値を、一定値に設定し、温度検出手段によって検出された放熱手段(ドラム)の温度が、回転速度検出手段によって検出された放熱手段(ドラム)の回転速度に対応する所定の閾値を超える温度であるときに、電気エネルギの発生を低減させる制御を行うリターダの制御装置を構成する。
(もっと読む)
ブレーキ・バイ・ワイヤシステムの初期化方法
【課題】本発明は、把握された道路条件を考慮して、タイムシーケンス(TS;Time Sequence)をおいて前輪のEWBと後輪のEMBを初期化することにより、初期化過程で全ての車輪のクランプ力の同時喪失を防止し、傾斜した道路でも運転手の車両統制権を維持することができるブレーキ・バイ・ワイヤシステムの初期化方法を提供する。
【解決手段】本発明は、左/右前輪にEWBをそろえ、左/右後輪にEMBをそろえたブレーキ・バイ・ワイヤシステムの初期化方法であって、初期化の遂行前に判断された道路条件に基づいて、時間差を持つように前記EWBの初期化と前記EMBの初期化の順序を決定し、初期化過程の間、初期化の遂行前に形成されている前記EWBと前記EMBのクランプ力が同時に解除されないようにするタイムシーケンス方式で具現される。
(もっと読む)
車両用情報処理装置
【課題】ドライバーに違和感を与えることを防止することが可能な車両用情報処理装置を提供する。
【解決手段】車両のドライバーの過去の減速操作の記録に基づいてドライバーに車両を減速させるための情報提示が行なわれるように情報処理を行なう運転支援装置10のECU30は、所定地点から一定範囲内におけるドライバーの過去の減速操作における減速開始地点と、ドライバーの情報提示から減速操作までの反応時間とを基準として、車両を減速させるための情報提示が行なわれるように情報処理を行なう。このため、ドライバーの過去の減速操作における減速開始地点に応じて車両を減速させるための情報提示が行なわれる場合に、ドライバーの反応時間に応じて車両を減速させるための情報提示が行なわれることになり、ドライバーに違和感を与えることを防止することができる。
(もっと読む)
路面勾配推定装置、車両用制御装置、及び車両用制御システム
【課題】車両の走行速度(実車速V)の微分値ACCw及び自身に加わる力に基づき加速度を感知する加速度センサの検出値ACCgに基づき、車両の走行する路面の勾配を高精度に推定することが困難なこと。
【解決手段】微分値ACCw及び検出値ACCgの差として、第1推定値ACCrgが算出され、これに所定の補正がなされることで第2推定値ACCrgpが算出される。第2推定値ACCrgpにローパスフィルタB48にてフィルタ処理を施すことで、勾配推定値ACCrgfが算出される。第1推定値ACCrgと、ローパスフィルタB50によりこれにフィルタ処理を施した遅延推定値ACCrgLとの差に基づき、勾配変化推定値Δを算出する。ローパスフィルタB48のカットオフ周波数fcは、上記勾配変化推定値Δに応じて可変設定される。
(もっと読む)
電動車両
【課題】再始動時において安定したトルク出力を得ることができる電動車両を提供する。
【解決手段】車両駆動用のモータで走行する電動車両1において、モータ2の作動中にモータ2の停止条件が成立した場合にはモータ2を自動的に停止させると共に、停止条件が解除された場合にモータ2を再始動させるモータコントロール部10と、停止条件が解除されてから所定時間までのモータ2の回転速度を積算して積算値を算出し、積算値に基づいて路面の傾斜状態を判定する路面傾斜判定部12とを備える。
(もっと読む)
1 - 20 / 126
[ Back to top ]