
Fターム[3D246HB12]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 車外障害物 (944) | 前方の車両 (469)
Fターム[3D246HB12]に分類される特許
201 - 220 / 469
運転支援装置
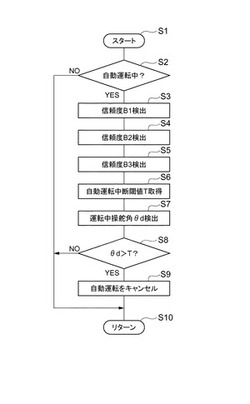
【課題】運転支援の機能を運転者が適切に利用することができる運転支援装置を提供すること。
【解決手段】本発明に係る車両の制御により運転者の運転を支援する運転支援装置は、運転支援制御中における運転者の操作介入に基づいて、運転支援制御を制限する運転支援制限手段と、運転支援制御の信頼度を検出する信頼度検出手段と、信頼度に応じて運転支援制限手段の作動条件を変更する作動条件変更手段と、を備えることを特徴とする。
(もっと読む)
車両走行支援装置及び車両走行支援方法

【課題】 必要に応じて予測した制御指令値を用いることにより高い精度で車両の運転操作を支援することができる車両走行支援装置等を提供する。
【解決手段】 第1制御指令値演算部22が所定の制御周期で第1制御指令値を演算し、将来状態予測部24が第1時刻における自車両運動状態及び障害物状態に基づいて第1時刻から所定時間後の第2時刻における自車両運動状態及び障害物状態を予測して、第2制御指令値演算部25が予測された第2時刻における自車両運動状態及び障害物状態に基づいて、第2時刻以降の第2制御指令値を演算する。予測適切度評価部23は、予測された自車両運動状態及び障害物状態と実際の自車両運動状態及び障害物状態とを比較して予測適切度を判定し、制御指令値出力処理部26は、予測適切度に基づいて第2時刻以降の実際の制御指令値として第1又は第2制御指令値を出力する。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
車両用運転支援装置
【課題】自動的に急な横移動回避が行われることによるオートメーションサプライズを抑えることができる車両用運転支援装置を提供する。
【解決手段】自車100の運動状態を検出する自車状態検出手段と、前方の障害物を検出する前方障害物検出手段としてのカメラ1と、ミリ波レーダ2と、前方障害物と接触しない自車100の第1制駆動力範囲を演算する第1制駆動力演算手段13と、後方障害物と接触しない自車100の第2制駆動力範囲を演算する第2制駆動力演算手段12と、第1及び第2制駆動力範囲を満たす自車制駆動力が存在する場合は、自車100はその制駆動力を実現して前方障害物、後方障害物との接触を回避し、存在しない場合は操舵も使用して前方障害物、後方障害物、側方障害物との接触を回避する車両操作量決定手段14と、を備える。
(もっと読む)
車両用運動制御装置
【課題】車両の安定性を確保しながら的確に障害物を回避する。
【解決手段】各タイヤの実際のタイヤ力を検出するタイヤ力検出手段(20)と、障害物との衝突を回避するために各タイヤの目標制動力を設定する制動制御目標制動力設定手段(S105)と、目標制動力の下で各タイヤの制動力を制御する制動制御手段(S110)と、各タイヤの制動力を制御した後に、該制動力の制御に続いて左右のタイヤの制動力の差によって車両を旋回させる回頭制御手段(S112-S122)と、車両の旋回方向を決定する障害物回避方向決定手段(S113,S121,S122)と、回頭制御手段(S112-S122)による各タイヤの制動制御の目標制動力を設定する回頭制御目標制動力設定手段(S118,S115)とを有する。
(もっと読む)
車両の運動支援装置及び車両の運動支援方法
【課題】第1制動部材と第2制動部材との間に存在する液体を除去するための液体除去制御を、前走車から巻き上げられるミスト状の液体を考慮した適切なタイミングで実行させることができる液体量推定装置及び車両の運動支援装置を提供する。
【解決手段】ECUは、降水中である場合に、自車の車体速度VS、ワイパの作動周期FS及び前走車との車間距離Lpを取得する(ステップS13〜S15)。ECUは、車間距離Lp、車体速度VS及び作動周期FSに対応する単位成長量ΔWl、第1ゲインA及び第2ゲインBを設定し、単位成長量ΔWlに各ゲインA,Bを共に乗算し、該乗算結果を実成長量ΔWとする(ステップS16)。ECUは、ブレーキロータの摺接面の水分膜厚Wを更新し(ステップS17)、該更新した水分膜厚Wが膜厚閾値KW以上である場合に、ブレーキロータにブレーキパッドを摺接させる水分除去制御を実行させる(ステップS18)。
(もっと読む)
走行支援装置
【課題】車両を経路誘導するための走行支援制御と、障害物を回避するための走行支援制御とを両立し、運転者にとって、より安全に、違和感を少ない走行支援装置を提供する。
【解決手段】走行支援装置は、自車が進行しようとする経路上へ誘導するための第1のラインと、障害物との接触を回避するための第2のラインを生成する生成部と、 前記第1及び第2のラインのうち、少なくとも1つのラインと前記自車の位置関係に基づいて、当該自車を制御する制御部を備える。
(もっと読む)
車両運転支援装置
【課題】停車場所の状況により必要な車間距離を取って停車するように運転者に促したり制動を掛けたりするとともに、必要に応じて衝突の回避措置を強制的に行ない、他車両との衝突を確実に防止する。
【解決手段】車両(自車)100の前方もしくは後方の車間距離と、自車100の接地面の勾配や状況とに基づき、自車100の前方もしくは後方について必要な車間距離が決定され、この必要車間距離と現在の車間距離とに応じ、自車100の運転者に対する通知もしくは警報または自車100の制動もしくは操舵が行なわれる。
(もっと読む)
プレビュー情報に基づいて運転支援の態様を変更する車輌
【課題】車輌運転支援装置に内在する作動遅れに相当する車輌走行距離以上に車輌より前方の位置にある走行経路の状況を事前に知ることにより、車輌がその位置に至ったときその走行経路状況により適した運転性能を有するように車輌運転支援の態様を先行制御する。
【解決手段】走行経路に沿って走行中の車輌の現在位置より走行経路に沿った前方の位置にある走行経路状況が第一と第二の状況の間に異なることに対応させて車輌の運転支援制御の態様を第一と第二の異なる態様の間で変更する。
(もっと読む)
車両制御装置および車両制御方法
【課題】回避すべき対象物を発見した場合等の緊急回避が要請される場合に、精度を担保しつつ限られた時間内に演算を完了させることができる車両制御装置および車両制御方法を提供することを課題とする。
【解決手段】本発明は、検出部を制御して回避すべき対象物を検出し、対象物までの距離を計測し、計測された距離に基づいて、制動回避または操舵回避を選択し、制動回避が選択された場合には条件式として前後方向のみの変数をもつ式を設定し、操舵回避が選択された場合には条件式として左右方向のみの変数をもつ式を設定し、設定された条件式に基づいて車両の将来の走行軌跡を演算することを特徴とする。
(もっと読む)
車両用加減速制御装置及びその方法
【課題】ナビゲーションシステムによる経路誘導の終了によりカーブ手前で減速制御が終了する場合でも、該カーブに対して有効に減速させる。
【解決手段】車両用加減速制御装置は、ナビゲーション装置14による車両の経路誘導時に、その誘導経路を基に、車両前方のカーブを検出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が検出したカーブに対応して車両を減速制御する目標車速演算部42等と、車両からみてナビゲーション装置14の経路誘導終了地点よりも遠方に制御対象のカーブが存在するときには、減速制御の制御内容を、該経路誘導終了地点に対応したものに変更する目標車速指令値演算部45と、を備える。
(もっと読む)
車両減速装置及び車両
【課題】1G以上の制動性能で車両を減速させることができ、低コストで車両の衝突を予防することができる車両減速装置を提供する。
【解決手段】車両を構成する車体1及び車輪2間に設けられ、車輪2に加わる荷重に応じて、伸縮するコイルスプリングを有する懸架装置31と、車両の衝突を予測する衝突予測部34とを備え、衝突予測部34が衝突を予測した場合、車輪2の回転を制動するようにしてある車両減速装置3に、衝突予測部34が衝突を予測した場合、コイルスプリングを可逆的に伸張させる伸張装置32を備える。
(もっと読む)
危険車両判定装置および運転支援システム
【課題】より少ない情報のみを用いて車両の状況に応じて危険を特定することのできる危険車両判定装置およびそれを用いた運転支援システムを提供する。
【解決手段】危険車両判定装置は、それぞれが異なる指向性を有する複数のアンテナと、自車両および周囲の車両の加速度を取得する加速度取得手段と、周囲の車両から送信される電波の前記複数のアンテナの各々における受信電力を取得する受信電力取得手段と、各アンテナにおける受信電力を、各アンテナにあらかじめ定められた重み付け係数を用いて平均する平均受信電力算出手段と、算出した平均受信電力が上位の所定数の車両について、自車両と当該車両との相対加速度が所定の閾値以上である場合に、当該車両を危険車両であると判断する危険判定手段と、を備える。
(もっと読む)
車両のブレーキ操作の評価装置、車両のブレーキ操作の評価方法、ブレーキ制御装置及びバッテリ制御装置
【課題】運転者が、適切なブレーキ操作を行っているか否かを判断することができ、燃費運転を訴求することが可能な車両のブレーキ操作の評価装置、車両のブレーキ操作の評価方法、ブレーキ制御装置及びバッテリ制御装置を提供する。
【解決手段】ブレーキペダルの踏込み量に基づいて要求制動力を算出するとともに、モータが出力可能な最大回生制動力、及び、バッテリが入力可能な最大回生制動力のうち、少なくとも一方の最大回生制動力を算出する。そして、要求制動力及び最大回生制動力に基づいてブレーキ操作の評価値を算出し、この評価値に応じた情報を報知する。この際、要求制動力が最大回生制動力を超えている場合、要求制動力が最大回生制動力を超えていない場合と比較して、ブレーキ操作の評価値を低く算出する。
(もっと読む)
衝突被害軽減制動制御装置
【課題】制動を実行したときの情報を保存することが可能な衝突被害軽減制動制御装置を提案する。
【解決手段】衝突被害軽減制動制御装置は、前方障害物との相対距離及び相対速度が、衝突判断基準値に到達する可能性があることを判断し(S1〜S2)、可能性があれば、相対距離及び相対速度を記憶し始める(S3)。次いで衝突判断基準値を超過するか否か判断し(S4〜S5)、衝突判断基準値を超過すると判断したときには制動を実行する(S7)。制動を実行したときには、それまでに記憶した情報を保存する(S8)。
(もっと読む)
ハイブリッド自動車のオートクルーズ制御装置及び車両の自動制動制御装置
【課題】ハイブリッド自動車のオートクルーズ制御装置及び車両の自動制動制御装置に関し、減速制御時における段付き感を解消しドライブフィーリングを向上させる。
【解決手段】車両の走行速度Vを車速検出手段2で検出し、これを巡航速度V0にするのに要求される要求制動力Fを要求制動力算出手段1aで算出する。
また、電動発電機の回生制動により所定の最大制動力を上限として任意の大きさの制動力を発生させる回生ブレーキ手段3と、不連続な大きさの所定制動力FBを段階的に発生させる補助ブレーキ手段4とを設ける。
制動制御手段1cにおいて、回生ブレーキ手段3及び補助ブレーキ手段4による制動制御を重複させるに際し、要求制動力Fが予め設定された第一所定値F1以上である場合には、補助ブレーキ手段4で所定制動力FBを発生させるとともに要求制動力Fから所定制動力FBを減じた大きさの制動力を回生ブレーキ手段3に負担させる。
(もっと読む)
車間距離検出装置および車速制御システム
【課題】超音波を用いた車間距離検出装置において、計測の精度を向上させる。
【解決手段】自車200の前部に設置され、先行車300に対して超音波Sを送信するとともに、先行車300で反射して戻った超音波S′を受信する超音波送受信機10と、超音波Sが超音波送受信機10から送信されてから、反射波としての超音波S′が受信されるまでの経過時間ΔTを計時する計時手段30および経過時間ΔTに基づいて先行車300との間の車間距離Lを算出する距離演算部50を有する距離算出装置20と、を備え、距離算出装置20は、反射波として受信した超音波S′のうち、路面(500)から反射して受信したノイズ成分(S2′)を除去するノイズ信号除去手段40を備え、距離演算部50は、ノイズ信号除去手段40によって除去された後の超音波S′についての経過時間ΔTに基づいて、車間距離Lを算出する。
(もっと読む)
制動制御装置
【課題】停止後に停止状態を保持する制動制御と、停止後に停止状態を解除する制動制御とを協働して実施できる制動制御装置を提供する。
【解決手段】制動制御装置1は、ECU2に第1制動制御部9と、第2制動制御部10とを備えている。第1制御部9は、車両Mの車速が車速下限値以上のときに、車両Mと対象物との衝突予測を行い、衝突が予測されると、車両Mの制動制御を実施し、制動制御の開始から所定時間経過後に制動制御を解除する。第2制動制御部10は、車両Mの車速が車速上限値以下であるときに、車両Mと対象物との衝突予測を行い、衝突が予測されると、車両Mの停止状態を保持するように車両Mの制動制御を実施する。また、第2制動制御部10は、第1制動制御部9により制動制御が実施された場合に、車速上限値及び衝突予測閾値回数を変更する。
(もっと読む)
車両用運転支援装置
【課題】自車の制動によって後方障害物との追突危険性がある場合に、後方障害物に制動操作を働きかけるような自車制動を行い、追突危険性を緩和することができる車両用運転支援装置を提供する。
【解決手段】自車が制動を行う場面か否かを判断する制動必要性判別手段9と、自車の運動状態を検出する自車状態検出手段と、自車の後方を走行する車両を検出する後続車検出手段と、制動必要性判別手段9によって自車が制動を行う必要性があると判断したときに、自車と後続車の情報に基づいて、後続車と接触せずかつ後続車に制動を促すような自車制動力を実現する自車制動力決定手段10と、を備えることにより、自車の制動によって後方障害物との追突危険性がある場合に、後方障害物に制動操作を働きかけるような自車制動を行い、追突危険性を緩和することができる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】交差点に進入する際の車速を適正な速度となるように運転者の運転を支援する。
【解決手段】交差点Xに進入するための減速意図があるか判定する。減速意図がある場合には、第1の設定車速を選択し、減速意図が無い場合には、上記第1の設定車速よりも低い第2の設定車速を選択する。そして、自車両が交差点Xに進入する際の車速Vを、選択した設定車速以下となるように制限する。
(もっと読む)
201 - 220 / 469
[ Back to top ]