
Fターム[3D246HC04]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | モデルによるもの (122) | タイヤモデルによるもの (26)
Fターム[3D246HC04]に分類される特許
1 - 20 / 26
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
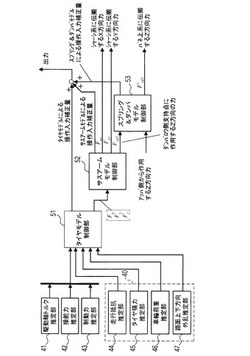
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
タイヤ接地状態推定装置

【課題】タイヤ接地状態の推定精度を向上させる。
【解決手段】転舵角、車速、及び前輪の路面摩擦係数に基づいて、前輪SAT推定値を推定し、車速に基づいて、後輪スリップ率推定値を推定し、転舵角、車速、及び後輪及び前輪の路面摩擦係数に基づいて、車両の横加速度推定値を推定する。一方、前輪のSAT検出値を検出し、後輪スリップ率検出値を検出し、車両の横加速度検出値を検出する。そして、前輪SATの推定値と検出値との差分で定義される前輪SAT推定誤差を演算し、後輪スリップ率の推定値と検出値との差分で定義される後輪スリップ率推定誤差を演算し、横加速度の推定値と検出値との差分で定義される横加速度推定誤差を演算する。そして、前輪SAT推定誤差、後輪スリップ率推定誤差、横加速度推定誤差のうち、少なくとも一つに応じて、後輪及び前輪の路面摩擦係数を補正する。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両制御装置
【課題】より精度よく、車両の走行制御を行うことのできる車両制御装置を提供すること。
【解決手段】車両1の走行を実現する複数のアクチュエータを、車両1の周辺の状況を検出する走行状況検出手段で検出した情報に応じて制御することにより車両1の走行制御を車両1の周辺の状況に応じて行うことが可能な車両制御装置2において、走行状況検出手段としてカメラ60、レーダー61、カーナビゲーションシステム65等の複数設けられており、これらの複数の走行状況検出手段で検出した複数の情報の信頼度に応じて、エンジン12や自動変速機15、EPS装置35、VGRS38、ブレーキ油圧制御装置50等の複数のアクチュエータのうち、一部のアクチュエータの制御量を制限する。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
牽引車輌の制御装置
【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
路面摩擦係数推定装置
【課題】いかなる車両の運動状態においても、重み付け等の複雑な処理を加えることなく、路面摩擦係数を連続的に自然な値で精度良く推定する。
【解決手段】実際に生じている推定ラック推力Fr_star、推定車輪制駆動力Fx_star、推定横力Fy_starを算出し、タイヤの縦ひずみと横ひずみを表現するパラメータλと路面摩擦係数μとをパラメータとして含むタイヤのブラッシュモデルにより基準ラック推力Fr_model、基準車輪制駆動力Fx_model、基準横力Fy_modelを算出し、推定ラック推力Fr_starと基準ラック推力Fr_modelとの偏差と推定車輪制駆動力Fx_starと基準車輪制駆動力Fx_modelとの偏差と推定横力Fy_starと基準横力Fy_modelとの偏差が最小となるように路面摩擦係数μの値を最適化計算により求める。
(もっと読む)
ブレーキシステムを制御する方法
【課題】制動下で車両の後車軸が持ち上がるのを防止することを目的とした、車両のブレーキシステムを制御する方法を提供する。
【解決手段】より詳細には、本発明は、少なくとも1つの前輪および少なくとも1つの後輪を備える車両のブレーキシステム(19)を制御するための方法であって、後輪が持ち上がる少なくとも1つの状態が存在するかどうかを判定するステップと、そうした状態が存在する場合に、車両のブレーキシステムによって前輪に加えられる制動の作用力を制限および/または低減するステップとを含むことを特徴とする方法に関する。
(もっと読む)
制動シミュレーション装置
【課題】ABS制御ユニットの制御パラメータであるスリップ率を容易に設定変更を可能とする制動シミュレーション装置を提供する。
【解決手段】車両の運動を表現する車両モデルと、車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、車両モデルと情報の受渡しを行う油圧系部品と、車両モデルからの情報に応じて油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、車両モデルが有する情報のうち車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度をABS制御ユニットに供給する補正手段をさらに備え、補正手段が車体速度と車輪回転速度に基づいて算出されるスリップ率をデータマップにより補正して補正スリップ率を求め、この補正スリップ率に基づいて補正車輪回転速度を算出して、ABS制御ユニットに出力するようにした。
(もっと読む)
摩擦円推定装置
【課題】 摩擦円の推定精度を高くすることができる摩擦円推定装置を提供すること。
【解決手段】 タイヤから車体に伝達する振動伝達特性が減衰特性となる周波数を有する同定トルクを車輪に付与するようにした。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】路面摩擦係数に対して高い精度で推定対象の値を得る。
【解決手段】車両接地面摩擦状態推定装置は、基準路面摩擦係数とは異なる路面摩擦係数μ1及び該基準路面摩擦係数とは異なる路面摩擦係数μ1の路面でのスリップ角βt1を入力とし、入力されたスリップ角βt1に、基準路面摩擦係数μ0を路面摩擦係数μ1で除した値(μ0/μ1)を掛け算して基準路面でのスリップ角βt0を得て、基準路面摩擦係数の基準路面で得られるタイヤ力とスリップ度との相関関係で成立するタイヤ特性をモデル化したタイヤモデルに従い、掛け算して得た基準路面でのスリップ角βt0に対応する基準路面での横力Fy0を得て、その得た基準路面での横力Fy0に、路面摩擦係数μ1を基準路面摩擦係数μ0で除した値を掛け算して路面摩擦係数μ1の路面での横力Fy1を得る。
(もっと読む)
車両用減速制御装置及びその方法
【課題】路面μの推定を必要とせず、路面状態に適合して減速制御する。
【解決手段】車両用減速制御装置は、検出した車輪力(横力Fy)及びスリップ度(スリップ角βt)を基に、車輪のグリップ特性を示すグリップ特性パラメータを得るμ勾配算出部25と、グリップ特性パラメータを基に、補正係数Kを得る補正係数K算出部26と、車両の旋回状態を基に目標車速V*を算出するとともに、該目標車速V*を補正係数Kにより補正する目標車速算出部22と、を備える。
(もっと読む)
アンチロック制御装置
【課題】適切なブレーキトルクを車輪に付与する。
【解決手段】アンチロック制御装置10は、増大モードとして、第1増大モードと該第1増大モードよりも小さいブレーキトルクを付与する第2増大モードとを有し、ブレーキ装置により車輪に実際に付与されるブレーキトルクを検知または演算して取得すると共に、増大モードの実行時に目標ブレーキトルクを演算する目標トルク演算部57を備え、増大モードの実行時に目標ブレーキトルクと実際のブレーキトルクとの偏差(ブレーキトルク偏差(Tt−T))が所定値以上の場合に、第1増大モードによりブレーキトルクを増大させ、ブレーキトルク偏差(Tt−T)が所定値未満の場合に、第2増大モードによりブレーキトルクを増大させる。
(もっと読む)
バーハンドル車両用ブレーキ制御装置
【課題】車両の総重量によらず、好適な制動制御を可能にする。
【解決手段】車両に設けられた加速度センサの検出結果に基づいて車両の旋回状態を判定し、車両の制動制御を行うバーハンドル車両用ブレーキ制御装置である。ブレーキ制御装置は、車両の前後方向に発生する前後方向加速度αlongを取得する前後方向加速度取得手段と、加速度センサの検出結果に基づいて車両の横方向に発生する横加速度αlatを取得する横加速度取得手段と、横加速度取得手段が取得した横加速度αlatに基づいて、制動により発生する前後方向加速度αlongの大きさの上限を規定する閾値AFthを設定する閾値設定手段26と、閾値AFthを用いて車両の制動力を制御する制動力制御手段とを備えて構成される。
(もっと読む)
車両の運動制御装置
【課題】カーブ減速制御実行中に車両安定性制御の開始が判定された場合、カーブ減速制御から車両安定性制御へと制御を円滑に移行できる車両の運動制御装置を提供すること。
【解決手段】この装置では、車両が適正な車速でカーブを通過できるようにカーブ減速制御用の制御量に基づいて車輪制動力を制御するカーブ減速制御と、車両のヨー安定性を維持できるように車両安定性制御用の制御量に基づいて車輪制動力を制御する車両安定性制御と、が選択的に実行される。カーブ減速制御実行中において車両安定性制御制御の開始が判定された場合、カーブ減速制御から車両安定性制御へと制御が切り替えられる。制御切替時点以降、車両安定性制御用の制御量にカーブ減速制御用の制御量が加算されて車両安定性制御用の修正制御量が演算され、この修正制御量に基づいて車両安定性制御が実行されていく。これにより、制御切替時点において車両制動力の総和に変化が発生しない。
(もっと読む)
車両状態量推定装置
【課題】 路面状態によらず、自動車の車両及び車輪の横すべり角を高精度に推定する。
【解決手段】 車両状態量推定装置が、車両運動検出手段と、ヨーレイト検出手段で検出されたヨーレイトおよび横加速度検出手段で検出された横加速度から後輪に働く後輪横力を演算する後輪横力演算手段と、後輪横力と予め定められた後輪タイヤ特性とにより後輪横すべり角を演算する後輪横すべり角演算手段と、後輪横すべり角を車両2輪モデルに基づいて第1の前輪横すべり角に換算する前輪横すべり角換算手段と、を有するように構成した。
(もっと読む)
車両運動制御システム
【課題】駆動力配分制御と制動力配分制御との併用により車両運動制御を効率的に行い得る車両運動制御システムを提供すること。
【解決手段】車両運動制御システム1では、車両運動制御にあたり、車両10の運動に関する状態量と、車両の運動に関する各車輪11FR〜11RLの制御量と、車両の運動を安定化させるための目標状態量と、目標状態量を実現するための目標制御量と、目標制御量を実現するための各車輪の制駆動力の目標制駆動力とが算出される。また、目標制駆動力に基づいて駆動力配分制御装置2による駆動輪11RR、11RLの駆動力制御と、制動力制御装置3による各車輪11FR〜11RLの制動力制御とが行われる。状態量が車両10の前輪横力および後輪横力を含む。このとき、駆動輪11RR、11RLに作用する横力が他の車輪11FR、11FLに作用する横力よりも小さくなるよう、制動力制御装置3が各車輪の制動力を制御する。
(もっと読む)
車体速推定装置、自動車、車体速推定方法および車両制御装置
【課題】車体速をより高精度に推定すること。
【解決手段】自動車1Aは、水平面とほぼ平行な車体フロア面に対し、設定されたピッチ角γだけ前後に傾けられた前後加速度センサ4によって、車両に作用する前後加速度を検出する。そして、制駆動力センサ3FR,3FL,3RR,3RLの検出値の合計と前後加速度センサ4の出力値を用い、(1)式に従って路面傾斜角θを算出する。さらに、その路面傾斜角θを用いて算出した進行方向加速度αの積分値から、車体速vを算出する。したがって、通常の車両走行状態において、(1)式における分母sinγがゼロとなることを防止しつつ、積分を用いることなく路面傾斜角θを推定するため、路面傾斜角θをより高精度に推定できる。さらに、その路面傾斜角θを用いて算出した進行方向加速度αから、車体速vを算出するため、車体速vをより高精度に推定することができる。
(もっと読む)
スリップ率推定装置、自動車、スリップ率推定方法および車両制御装置
【課題】車輪のスリップ率をより高精度に推定すること。
【解決手段】自動車1Aは、水平面とほぼ平行な車体フロア面に対し、設定されたピッチ角γだけ前後に傾けられた前後加速度センサ4によって、車両に作用する前後加速度を検出する。そして、制駆動力センサ3FR,3FL,3RR,3RLの検出値の合計と前後加速度センサ4の出力値を用い、(1)式に従って路面傾斜角θを算出する。さらに、その路面傾斜角θを用いて算出した進行方向加速度αの積分値(進行方向加速度)と各車輪の車輪速ωとを用いて、車輪のスリップ率λを算出する。したがって、通常の車両走行状態において、(1)式における分母sinγがゼロとなることを防止しつつ、積分を用いることなく高精度に路面傾斜角θを推定するため、その路面傾斜角θを用いて算出した進行方向加速度αから、より高精度にスリップ率を推定することができる。
(もっと読む)
1 - 20 / 26
[ Back to top ]