
Fターム[3D246HC13]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | 別の方法で求めた同じ物理量を使うもの (44) | 2つの値の誤差を推定に用いるもの (19)
Fターム[3D246HC13]に分類される特許
1 - 19 / 19
車両運転支援装置

【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
ブレーキ制御装置

【課題】長時間モータ駆動を行わなくても、モータ空回り判定を行うことが可能なブレーキ制御装置を提供する。
【解決手段】モータ空回り判定時に、モータ60を2回駆動し、1回目には第1時間モータ駆動を行い、2回目には第1時間よりも長い第2時間モータ駆動を行う。そして、1回目と2回目それぞれで、モータ60停止後のモータ60による発電電圧(MT)が所定の閾電圧に低下するまでの第1、第2電圧低下時間MT1、MT2の差が閾時間以上であるか否かを判定することで、モータ空回り判定を行う。このように、1回目と2回目のモータ駆動時間を変えることにより、極低温時のように、ブレーキ液やモータ60の回転軸に塗布されているグリスなどの粘度が高くなったとしても、第1、第2電圧低下時間MT1、MT2の差に基づいて、モータ空回り判定が行える。したがって、長時間モータ駆動を行わなくてもモータ空回り判定を行うことができる。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
車両の制動制御装置
【課題】 制動装置に故障が生じたときに、ドライバが制動装置の故障を認識していない場合であっても、車両が動き出すことを防止することができる制動制御装置を提供する。
【解決手段】 ブレーキECU1は、ブレー故障センサ6からブレーキ故障信号を受信した際に、警報装置8に警報信号を送信するとともに、パワートレインECU2にブレーキ異常信号を送信する。パワートレインECU2は、ブレーキ異常信号を受信した場合に、パワートレイン5におけるクラッチ12を開放する。また、車両が走行する道路の路面勾配が上り勾配である場合には、クラッチ12を係合する。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
ABS制御装置、及びプログラム
【課題】装着されたタイヤが規定サイズでない場合であっても、ABS制御精度の低下を防止するABS制御装置、及びプログラムを提供する。
【解決手段】ABS制御装置は、車体の前輪速度値を取得する前輪速度値取得部(110)と、前記車体の後輪速度値を取得する後輪速度値取得部(112)と、前記前輪速度値及び前記後輪速度値から前記車体の推定車体速度値を推定する車体速度値推定部(114)と、前記前輪速度値又は後輪速度値が、前記推定車体速度値を基準とした一定の範囲に近づくように、前記前輪速度値又は前記後輪速度値を補正する速度値補正部(116)と、前記前輪速度値又は補正された前記後輪速度値と、前記推定車体速度値とを用いて前輪又は後輪のスリップ率を算出するスリップ率算出部(124、126)と、前記前輪又は前記後輪の前記スリップ率を判定してABS制御を行うABS制御部(128)と、を備える。
(もっと読む)
車両用制御装置
【課題】GPS受信装置が無くても大気圧センサの異常検出を行うことができるようにする。
【解決手段】前後加速度センサの検出信号に基づいて検出される勾配角度θや車輪速度センサの検出信号に基づいて演算される推定車体加速度dVに基づいて高度変化量を算出し、高度変化量から気圧変化量を推定する。そして、気圧変化量のセンサ値と推定値とを比較することにより、大気圧センサの異常を検出する。これにより、GPS受信装置が無くても大気圧センサの異常検出を行うことが可能となる。
(もっと読む)
車両の制動制御装置
【課題】アンチロックブレーキ制御中において第1の電磁弁の動作態様を調整することにより、車両の挙動の更なる安定化に貢献できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において、圧力センサからの検出信号に基づきホイールシリンダ内の実WC圧Pwc_rを取得すると共に、増圧弁及び減圧弁の駆動態様に基づきホイールシリンダ内の推定WC圧Pwc_eを取得する。そして、ECUは、実WC圧Pwc_rと推定WC圧Pwc_eとの間に差がある場合、実WC圧Pwc_rが推定WC圧Pwc_eに近づくように、増圧弁に供給される指令電流値Idを調整する(第8のタイミングt18〜第9のタイミングt19)。
(もっと読む)
路面摩擦係数推定装置
【課題】車両の所定のヨー軸周りのモーメントの推定値を用いて路面の摩擦係数の推定を行う場合に、路面の摩擦係数の推定値の信頼性や安定性をさらに向上させる。
【解決手段】車両1のヨー軸周りの外力モーメントの第1推定値Mz_estm_kを求める手段(S102〜S116,S118−4)と、第2推定値Mz_sens_kを求める手段(S118−3)と、偏差(Mz_sens_k−Mz_estm_k)を“0”に収束させるように路面摩擦係数の推定値の増減操作量Δμ_kを決定する手段(S118−6)とから成る基本処理手段31_kを複数備え、Δμ_kに応じて路面摩擦係数の推定値を更新する。基本処理手段31_kのそれぞれに対応するヨー軸は互いに異なる位置に設定される。
(もっと読む)
ブレーキ制御装置
【課題】運転者のブレーキ操作を正確に反映していない入力の影響を低減するブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、運転者のブレーキ操作量に応じて変動する第1の測定対象を測定する第1センサと、運転者のブレーキ操作量に応じて変動し第1の測定対象とは異なる第2の測定対象を測定する第2センサと、第1センサの出力に基づいて第1目標減速度を演算し、第2センサの出力に基づいて第2目標減速度を演算する制御部と、を備える。制御部は、第1及び第2センサのうち信頼性が高いと見込まれるほうのセンサ出力を用いて他方のセンサに基づく目標減速度を制限する。
(もっと読む)
運転支援装置
【課題】運転支援の機能を運転者が適切に利用することができる運転支援装置を提供すること。
【解決手段】本発明に係る車両の制御により運転者の運転を支援する運転支援装置は、運転支援制御中における運転者の操作介入に基づいて、運転支援制御を制限する運転支援制限手段と、運転支援制御の信頼度を検出する信頼度検出手段と、信頼度に応じて運転支援制限手段の作動条件を変更する作動条件変更手段と、を備えることを特徴とする。
(もっと読む)
航空機電動ブレーキ制御システム
【課題】左右車輪の一方が制動不能になることを防止する航空機電動ブレーキ制御システムを提供する。
【解決手段】左右電動ブレーキ装置101、201が左右車輪を独立して制動する航空機電動ブレーキ制御システムであって、第一ブレーキシステム制御ユニット120は、左第一ストロークセンサ111の操作量検出信号に応じて左電動ブレーキ装置101に対する制動力指令値を演算するとともに、右第一ストロークセンサ211の操作量検出信号に応じて右電動ブレーキ装置201に対する制動力指令値を演算し、第二ブレーキシステム制御ユニット220は、左第二ストロークセンサ112の操作量検出信号に応じて左電動ブレーキ装置101に対する制動力指令値を演算するとともに、右第二ストロークセンサ212の操作量検出信号に応じて右電動ブレーキ装置201に対する制動力指令値を演算する構成とした。
(もっと読む)
センサ信号を補償するためのシステム及び方法
【課題】センサ信号を補償する。
【解決手段】第1のセンサ110は、車両の第1の条件に対応する第1の信号を生成するように構成される。第2のセンサ115は、車両の第2の条件に対応する第2の信号を生成するように構成される。ファジィ論理モジュール120は、少なくとも第2の信号の信号安定性に基づいて、第1の組の値を出力するように構成される。カルマンフィルタモジュール125は、第1の組の値及び第1の信号を受信すると共に、少なくとも該第1の組の値及び該第1の信号に基づいてセンサ補償信号を推定する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ制御装置の異常時の無用な動作を抑制する。
【解決手段】ブレーキ制御装置は、ストロークセンサと、作動液圧センサと、ストップランプスイッチと、制御部と、を備える。制御部は、ストロークセンサの測定値に基づいてブレーキ操作の有無を判定する第1判定と、作動液圧センサの測定値に基づいてブレーキ操作の有無を判定する第2判定と、を並列に行い、第1判定及び第2判定の少なくとも一方でブレーキ操作有りと判定した場合に運転者がブレーキを操作したと判定する。制御部は、第1判定でブレーキ操作無しと判定しているときに第2判定でブレーキ操作有りと判定した場合には、ストップランプスイッチから入力される信号がブレーキ操作無しを示していることを条件として運転者がブレーキを操作していないと判定する。
(もっと読む)
車両における少なくとも1つのホイールのロケーティングのための方法、センサ、検出器及びシステム
本発明は車両(1)における少なくとも1つのホイール(2a〜2d)のロケーティングのための方法に関する。ここでは、
a)ホイール(2a〜2d)に取付けられている第1のセンサ(4a〜4d)からのホイール(2a〜2d)位置(P1〜P6)を示す信号(S4a〜S4d)を受信するステップと、
b)ホイール(2a〜2d)の角度位置を測定しさらに車両(1)の特定の位置に対応付ける第2のセンサ(5a〜5d)の測定値(S5a〜S5d)を受信するステップと、
c)前記測定値(S5a〜S5d)に関する第1の信号(S4a〜S4d)の位相位置(W1a〜W3a,W1b〜W1b)を確定するステップと、
d)前記位相位置(W1a〜W3a,W1b〜W1b)が所定の監視期間において所定の許容範囲(WTa,WTb)内に留まっている場合に、第2のセンサ(5a〜5d)に第1のセンサ(4a〜4d)を割当てるステップが含まれる。 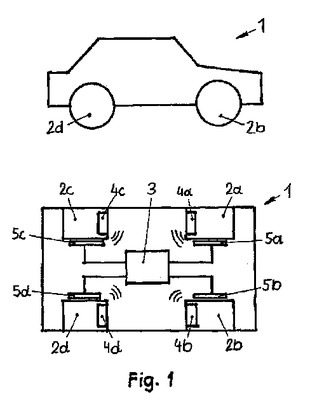 (もっと読む)
(もっと読む)
ブレーキ制御装置
【課題】 意図しないHDC制御の介入を防止したブレーキ制御装置を提供する。
【解決手段】 車両が坂道走行中または平坦路走行中かを判断する坂道判断手段と、車速を検出する車速検出手段と、前記車両が坂道走行中の場合、前記車速が目標車速を上回っているときは前記ホイルシリンダの液圧を増圧し、前記車速が目標車速を下回っているときは前記ホイルシリンダの液圧を減圧することにより、前記車速を一定値に収束させる定速走行制御を実行するコントロールユニットとを備えるブレーキ制御装置において、前記コントロールユニットは、前記坂道判断手段により坂道走行から平坦路走行へ移行したと判断された場合、前記定速走行制御を終了することとした。
(もっと読む)
トラクタにおけるトレーラ運転の検出方法および制御装置
【課題】トラクタがトレーラ運転内に存在しているかどうかを確実に検出可能な、特に走行動特性制御方法の一部としての、改善されたトラクタにおけるトレーラ運転の検出方法を提供する
【解決手段】 本発明は、特にトラクタおよびトレーラからなる連結車を安定化させるためのトレーラ横揺れ論理を有する走行動特性制御装置の一部としての、トラクタにおけるトレーラ運転の検出方法並びに方法を実行するための制御装置において、トレーラ運転の検出が、走行状態を表わす実際信号と、対応の目標信号との比較により行われるように設計される。
(もっと読む)
自動車の長手方向の速度を推定する方法
本発明は、2つの駆動輪と少なくとも1つの電子中央処理ユニットとを備えた自動車の長手方向の速度を推定する方法に関し、本方法では、2つの駆動輪を含む4つの車輪の回転速度に基づいて、それら回転速度を降順に順位付けした後、加速段階において、車両の長手方向速度と3番目に速い車輪の速度とを比較し、且つその加速度を最も遅い車輪の加速度以下に抑え、減速段階において、上記長手方向速度と、最も速い車輪の速度とを比較し、且つその加速度の絶対値を2番目に速い車輪の同値以下に抑え、長手方向速度が3番目に速い車輪の速度と最も速い車輪の速度の間に位置するとき、その値を一定に維持する。  (もっと読む)
(もっと読む)
1 - 19 / 19
[ Back to top ]