
Fターム[3D246JA12]の内容
ブレーキシステム(制動力調整) (55,256) | 目標制御量 (1,430) | 車輪に関するもの (718) | ホイールシリンダ圧、制動力、制動トルク (546)
Fターム[3D246JA12]に分類される特許
201 - 220 / 546
ブレーキシステム
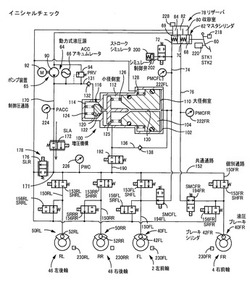
【課題】ブレーキシステムの信頼性を向上させる。
【解決手段】増圧リニア制御弁172の閉状態において、ポンプ装置65の作動により、増圧リニア制御弁172の動力式液圧源側の液圧を第1設定圧PACC0とする。保持弁153、増圧機構遮断弁192を閉状態として、増圧リニア制御弁172を開状態とする。ブレーキシリンダ圧センサ226の検出値が異常判定しきい値Pthより大きくなれば、制御系は正常であり、異常判定しきい値Pthに達しない場合には制御系は異常であるとされる。制御系が正常であるか否かが検出されるのであり、ブレーキシステムの信頼性を向上させることができる。
(もっと読む)
車両用制動装置

【課題】セルフサーボ効果の有無を考慮して電動アクチュエータの作動を制御する車両用制動装置を提供する。
【解決手段】電子制御ユニット21のCPU21aは、車両の減速に伴って、車速センサ24から入力した車速Vが所定の小さな車速V0以下となるとき、セルフサーボ効果が無効化したと判定する。次に、CPU21aは、現在、電動アクチュエータ13に供給しているモータ電流値Iに対応して前記効果が発生している場合の荷重と前記効果が無効化した場合の荷重との荷重差ΔFを決定し、この荷重差ΔFを荷重センサ22から入力した検出荷重Fに加算して補正する。そして、CPU21aは、補正した検出荷重Fと車両を減速させるために決定した目標荷重Fdとの差分を計算し、この差分に基づいてアクチュエータ13の駆動を制御する。これにより、前記効果の有無によってアクチュエータ13に供給する電流値Iの急増を防止し、連続性を保つことができる。
(もっと読む)
車両用制動装置および車両用制動装置の制御方法
【課題】装置構成に要する費用が嵩むことを防止して、車両の減速度の算出精度を向上させて、車両の制動力を適切に制御する。
【解決手段】車両用制動装置10は、車輪速センサ45により検出された車輪速VWと、加速度センサ46により検出された前後方向加速度Gfrとに基づき、前輪および後輪の推定制動トルクTBF,TBRを算出する推定制動トルク演算部60と、車輪速VWから算出された推定車体減速度GRDVに基づく車体速度VRおよび目標車輪速VWPから目標制動トルクTBTを算出する目標制動トルク演算部59と、目標制動トルクTBTと、前輪および後輪の推定制動トルクTBF,TBRとの差(制動トルク差)TBEに応じてABS制御モードを設定し、制動トルクを制御するバルブ制御部61とを備える。
(もっと読む)
ブレーキシステム
【課題】ブレーキシステムの改良を図る。
【解決手段】電気系の異常時には、マスタシリンダ62の液圧により増圧機構100が作動させられ、サーボ圧が、左右前輪2,4のブレーキシリンダ42に供給される。それに対して、液漏れの可能性が有ると検出された場合には、前後遮断弁330,左右遮断弁332が閉状態とされる。その結果、いずれかのブレーキ系統に液漏れが検出されても、他のブレーキ系統に、その影響が及ぶことを回避することができる。一方、左右遮断弁332,前後遮断弁330は、常開の電磁開閉弁であるため、液圧ブレーキ40,50の非作用状態である場合等の開許可条件が満たされる間は、開状態とされる。それにより、消費電力の低減を図り、かつ、ソレノイドの発熱を抑制することができる。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
ブレーキ制御装置
【課題】大きな車両挙動に際し、その挙動抑制を図ることができるブレーキ制御装置を提供する。
【解決手段】車体の前部が上がるピッチ挙動が大きくなり、変形ピッチ角速度α・dθ/dtが所定値j01以下になって、挙動制御用制動信号算出回路14が出力する挙動制御用制動信号Fが目標制動力信号Kとしてアクチュエータ17に入力されると、前輪用のブレーキ手段が挙動制御用制動信号Fに応じた制動力を発生する。これにより、車体には前方方向の荷重移動が生じ、前記ピッチ挙動を抑制する。ピッチ運動の抑制を、ショックアブソーバの作動により行なうのではなく、車輪を制動することにより行なうので、仮にショックアブソーバがフルストロークし、ショックアブソーバによってはピッチ運動の抑制が困難な状況となる大きなピッチ挙動にも対応して、その大きなピッチ挙動の抑制を果たすことができる。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
航空機用非対称電気制動機構
【課題】航空機用電気制動機構における正常系システム及び緊急系システムの共通モード障害リスクを軽減すること。
【解決手段】本願発明は,いくつかの電気機械制動アクチュエータ(EBA)を備え,正常モードにおいて,制動指令に応答して制動設定値を生成するための制動制御ユニットと,複数の電気機械アクチュエータ制御器(EMAC)であって,それぞれ交流電源によって給電され,制動設定値に応答してEBAに電力を供給する少なくとも一つのインバータをそれぞれ含む電気機械アクチュエータ制御器と,直流電源だけから給電される少なくとも一つの緊急制動電源及び制御ユニット(EBPCU)であって,制動指令に応答してEBAのいくつかに電力を供給する少なくとも一つのインバータを含む緊急制動電源及び制御ユニットと,機構に電力が流れることを防止すると共に,アクチュエータに対してEMAC又はEBPCUが供給する電力を伝えるための保護手段と,を備える。
(もっと読む)
電動車両の制動制御装置
【課題】電気的制動手段と油圧制動手段とを備え、アンチロック制御を行う際に、静粛性を向上することが可能な電動車両の制動制御装置を提供すること。
【解決手段】目標制動トルクを駆動系の共振周波数を含まない第1周波数成分と、駆動系の共振周波数を含む第2周波数成分とに分解し、第1周波数成分により電気的な制動トルクを与える電動モータを制御し、第2周波数成分により車輪に摩擦制動トルクを与える摩擦制動装置を作動させることとした。
(もっと読む)
ブレーキ制御装置
【課題】エンジンルーム内におけるレイアウト自由度の向上を図ることが可能なブレーキ制御装置を提供すること。
【解決手段】マスタシリンダと各輪に制動力を発生するホイルシリンダとを接続する配管上に設けられたブレーキユニットであって、前記ブレーキユニットは、ハウジングの上面に形成された前記マスタシリンダと配管を介して接続する第1ポートと、前記ハウジングの上面に形成された前記ホイルシリンダと配管を介して接続する第2ポートと、前記ハウジング内に設けられたポンプと、前記ハウジングの第1側面に取り付けられ前記ポンプを回転駆動するモータと、前記運転者のブレーキペダル操作により移動するマスタシリンダ内のブレーキ液を貯留するストロークシミュレータと、を備え、前記ストロークシミュレータは、前記第1側面において前記モータのモータ回転軸を通り前記上面に平行な仮想線と上面との間に位置するように取り付けられている。
(もっと読む)
車両の旋回挙動制御装置
【課題】旋回走行時における制動力制御を迅速かつ適切に行い、走行性能を向上させる。
【解決手段】車両の左右輪の制動力を独立して制御可能に構成し、左右の車輪速度センサにより検出した左右輪の実車輪速度の差DVFと、車両の走行状態に基づいて演算した左右輪の目標車輪速度差DVrefとの速度差ΔNを演算して(S30)、該速度差ΔNに基づいて左右輪の制動力を制御する(S90)第1の制動制御手段と、ヨーレイトセンサにより検出した実ヨーレイトと、車両の走行状態に基づいて演算した目標ヨーレイトの差に基づいて左右輪の制動力を制御する(S80)第2の制動制御手段とを有し、第2の制動制御手段による制御時には、第1の制動制御手段による制御を規制する。
(もっと読む)
運転支援装置
【課題】衝突判定における判定精度を向上させる運転支援装置を提供することを課題とする。
【解決手段】自車両と他車両との衝突の可能性を判定する運転支援装置であって、自車両と他車両との相対距離Dr及び相対速度Vrを用いて衝突予測時間TTCを算出する第1算出手段と、自車両と他車両との相対距離Dr、相対速度Vr及び相対加速度Arを用いて第2衝突予測時間TTC2ndを算出する第2算出手段と、第2衝突予測時間TTC2ndが実数の場合にのみ衝突予測時間TTC及び第2衝突予測時間TTC2ndの少なくとも一方を用いて自車両と他車両との衝突の可能性を判定する衝突判定手段を備えることを特徴とする。
(もっと読む)
車両のブレーキシステムの作動のための方法、ブレーキシステム
【課題】ブレーキペダルによって制御可能の少なくとも一つのブレーキ装置、及びブレーキペダルの操作に依存している変化率の把捉のための手段、並びに、把捉された変化率を事前設定可能な閾値と比較するための装置、を備えた、ブレーキシステムの作動のための方法
【解決手段】事前設定可能な閾値をオーバーすることによって、ブレーキペダルの操作に依存している変化率により自動的な制動プロセスが開始される、車両、特に自動車、のブレーキシステムの作動のための方法に関する。その際、閾値がブレーキシステムの初期化作動の間にドライバーによって事前設定/変更される、と云うことが考えられている。
(もっと読む)
航空機の制動制御法と、対応する制動システム
【課題】航空機の制動装置の摩擦要素の磨耗を最小にする。
【解決手段】摩擦ブレーキと、摩擦以外の手段でエネルギーを散逸させることのできる補助ブレーキとが取り付けられた車輪を有する着陸装置を備える航空機において、制動が必要なとき、制動パラメータをテストすることで必要な制動を提供するのに摩擦ブレーキが不可欠ではない制動状況に航空機があるかどうかを判断し、航空機が前記制動状況に留まっている限り補助ブレーキを優先的に作動させ、航空機がその制動状況を逸脱した場合にだけ摩擦ブレーキを作動させることにより必要な制動を実行する。
(もっと読む)
車両の走行安全制御装置
【課題】事前に渋滞末尾を予測し、自車両が渋滞末尾に近づいたときに被害軽減ブレーキの準備を行うことで、走行路の状況に関わらず円滑に被害軽減ブレーキ制御を実行することのできる車両の走行安全制御装置を提供すること。
【解決手段】カメラに撮影した「渋滞」の文字を含む電光表示を抽出し(S1)、当該表示内容に応じて渋滞末尾を推定し(S4)、当該渋滞末尾までの距離が所定距離未満であるときには被害軽減ブレーキの準備を行う(S5,S6)。
(もっと読む)
車両用ブレーキ圧制御装置
【課題】車両に大きなヨーレートが発生するのを抑制することができる車両用ブレーキ圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ圧制御装置は、低摩擦側ブレーキ圧と許容差圧とに基づいて高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標圧を算出する機能(目標圧設定手段52C)を備えるとともに、高摩擦側ブレーキ圧の目標圧の変化量を制限するための制限値を算出する制限値算出手段52Dと、目標圧と制限値から目標圧の変化量を制限した制限目標圧を算出する制限目標圧算出手段52Eと、制限目標圧に基づいて高摩擦側ブレーキ圧を制御する高摩擦側ブレーキ圧制御手段52Fを備える。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】閉弁特性と開弁特性とが大きく異なる場合であっても、良好な減圧を実現することができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置の制御部は、調圧弁の上下流の差圧と、閉弁させるための出力電流値との関係を示す閉弁用マップMP2と、差圧と、開弁させるための出力電流値との関係を示す開弁用マップMP1とが記憶された記憶部を備え、調圧弁の開弁によって車輪ブレーキ内の液圧を減圧する場合には、開弁用マップMP1の出力電流値と閉弁用マップMP2の出力電流値を交互に選択して、調圧弁に流す電流を制御する電流値切替制御を実行する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ABS制御中に車両挙動制御を実行する場合に、ブレーキ液圧の急変を抑制し、ブレーキフィーリングを向上させることを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車両の旋回状態に基づいて制御対象車輪を加圧するのに必要な加圧液圧を算出する加圧液圧算出部121Aと、車両の旋回による横加速度を取得し、当該横加速度に基づいて制御対象車輪が存在する前後位置における左右の車輪に掛かる荷重比を算出する荷重比算出部121Bと、車両挙動制御の制御対象車輪と前後位置が同じで左右逆側の車輪の推定液圧を制御対象車輪の基本液圧とし、当該基本液圧を荷重比で補正した修正基本液圧を算出する修正基本液圧算出部121Cとを備え、アンチロックブレーキ制御中に車両挙動制御を実行する際には、修正基本液圧に加圧液圧を加算することで、目標液圧を算出するように構成される。
(もっと読む)
電磁弁
【課題】自励振動を抑制する等によって、より実用的な電磁弁を得る。
【解決手段】流量制御弁たる電磁弁400のプランジャ410の基端側にストレート部420を設け、そのストレート部420より先端側の部分を、先端に向かって直径が漸減するテーパ部422とする。それにより、プランジャ410を、ストレート部420とハウジング120との嵌合部を中心に傾動可能とする。プランジャ410の後退限度を、吸引面196とプランジャ410の肩面との、薄板194を介しての当接により規定し、その後退限度においてもプランジャ410の先端に保持させた弁子としてのボール130が、弁座128としてのテーパ面に接触可能とする。いかなる開度においても、ボール130が弁座128に接触し続け、プランジャ410の軸方向の振動が抑制される。
(もっと読む)
車両ロール角演算装置およびそれを用いた車両運動制御装置
【課題】より精度良く車両のロール角を演算することができる車両ロール角演算装置を提供する。
【解決手段】横加速度が基準値を超えたときに初期ロール角を推定し、これを積算ロール角に足し合わせることで、最終的なロール角を演算する。これにより、積算ロール角の積算前に付いていたロール角についても加味した正確なロール角を求めることが可能となる。つまり、横加速度が基準値よりも小さいときに既にロール角が付いていたような場合に、それを加味して初期ロール角を演算することができる。したがって、実際には横転に至るような大きなロール角が発生しているのにも関わらず、推定ロール角が小さい値となることを抑制でき、正確なロール角を演算することが可能となる。
(もっと読む)
201 - 220 / 546
[ Back to top ]