
Fターム[3D246JB31]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 増圧制御 (357)
Fターム[3D246JB31]の下位に属するFターム
Fターム[3D246JB31]に分類される特許
121 - 140 / 162
車両の走行制御装置及び車両の走行制御方法
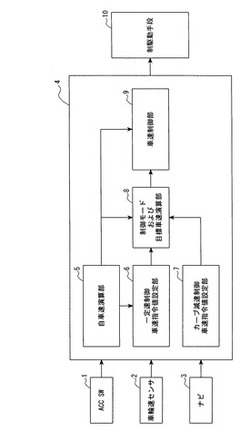
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
車両の制動装置

【課題】摩擦制動手段による摩擦ブレーキ力と油圧モータによる油圧ブレーキ力との作動制御を統一して行う。
【解決手段】油圧ポンプ32と、油圧ポンプ32からの油圧供給を受けて駆動される油圧モータ21L,21Rと、これら油圧モータの回転駆動力を受けて回転する鉄輪4L,4Rとを備えて軌陸式高所作業車1が構成される。この高所作業車1において、油圧力を用いて鉄輪を機械的に制動する油圧作動式の摩擦ブレーキ装置(41L,41R&43L,43R)と、入口ポートが油圧モータの吐出ポートに繋がって配設され、出口ポート側の油圧に応じて入口ポート側の油圧を調圧して油圧モータの吐出油圧を制御するカウンターバランスバルブ35と、出口ポート側の油圧を調圧するブレーキ制御バルブ36と、ブレーキ制御バルブにより調圧された出口ポート側の油圧をブレーキキャリパ43L,43Rに導くブレーキ油路55a,55bとを備えて構成される。
(もっと読む)
車両走行制御装置
【課題】ハンチングや違和感を抑制できる車両走行制御装置を提供すること。
【解決手段】車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度センサ3と、前記車輪に制動力を付与することができるブレーキ装置200と、前記車輪速度センサ3で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与するブレーキ装置制御部83と、前記ブレーキ装置200を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定部84と、を備える。
(もっと読む)
ディスクブレーキ
【課題】 複数のキャリパを用いることなくモータおよびマスタシリンダの小型化を図ることができるディスクブレーキを提供する。
【解決手段】 電子制御ディスクブレーキ1は、キャリパ2のアウタパッド7b側に設け、ブレーキ液圧に応じてアウタパッド7bをブレーキディスクBDに押し付ける液圧ピストン9と、キャリパ2のインナパッド7a側に設けたモータ5と、キャリパ2のインナパッド7a側に設け、モータ5の回転力を直進運動に変換し、インナパッド7aをブレーキディスクBDに押し付けるボールねじ機構6と、を備える。
(もっと読む)
車両用障害物検出装置
【課題】交差路において歩行者などの障害物との衝突を有効に回避することが出来るように障害物を検出する車両用障害物検出装置を提供する。
【解決手段】本発明は、交差路に設置された反射鏡に写る障害物の像を利用して障害物を検出する車両用障害物検出装置であって、交差路に設置される反射鏡を検出する反射鏡検出手段と、反射鏡に写る障害物の像を検出する障害物像検出手段と、検出された障害物の像からその障害物の反射鏡への接近度を算出する障害物接近度算出手段と、接近度に応じて警報システム及び/又は安全システムを制御するシステム制御手段と、を有する。
(もっと読む)
車両制御装置
【課題】制御演算に用いる横加加速度を、ノイズの増大を招くことなく、また、位相の遅れもさほど生じることなく、精度良く算出することができるとともに、車両が横滑りしているときも精度良く算出することができ、この算出された横加加速度に基づいて車両制御を適切に行うことができるようにされた車両制御装置を提供する。
【解決手段】ロール角速度等の車両状態量を検出する車両状態量検出手段と、車両状態量に基づいて車両の横加加速度を算出する横加加速度算出手段と、横加加速度に基づいて車両制御を行う制御手段とを備える。より具体的な好ましい態様では、横加加速度算出手段15は、前記ロール角速度を入力とする伝達関数Aを用いて前記横加加速度を推定するようにされる。
(もっと読む)
車両用警報装置
【課題】 警報制動前の車両の加速度によって警報開始前後の加速度の変化量に差異があるために引き起こされる、警報によって運転者が違和感を覚えてしまう問題や、警報効果が小さくなってしまう問題を回避する車両用警報装置を提供すること。
【解決手段】 この車両用警報装置は衝突予測時間tが警報制動時間T1に達したときの自車両の加速度aに基づいて、警報制動中の目標加速度bを決定する。その上で、装置はエンジンのスロットルバルブを全閉にすることにより駆動力を0にする。更に、装置は目標加速度bが達成されないと考えられる場合には目標加速度bを達成するような制動力を付与する。衝突予測時間tが警報制動時間T1に達したときの加速度aに基づいて目標加速度bが適切な値に設定され得るから、警報開始前後の加速度の変化量を適切な量にすることができる。
(もっと読む)
スノーフェード発生を持続的に推定してスノーフェード解消制御を行う車輌
【課題】スノーフェード解消制御を実行すべき車輪回転の減速度の低下の度合が小さく設定されれば、スノーフェードは軽度のうちに解消されるが、スノーフェード発生推定確度が低下し、制動装置の作動の安定性が損なわれ、同制御を実行すべき車輪回転の減速度の低下の度合が大きく設定されれば、スノーフェード発生推定確度は上がるが、スノーフェードによる制動力の一時低下の度合は大きくなり、制動能力が損なわれることに対し、スノーフェード発生推定を最適化する。
【解決手段】車輪回転の減速度がスノーフェードの発生を推定させる状態が所定時間以上持続したことを確認してスノーフェード解消制御を行う。
(もっと読む)
ブレーキ制御装置
【課題】 停車維持制御中に運転者が再度ブレーキ操作を行った場合でも、良好なブレーキ操作感を与えることができるブレーキ制御装置を提供すること。
【解決手段】 ブレーキ操作に応じて作動するマスタシリンダM/Cからの圧力が作用する第1ホイルシリンダ5a、5bを有するマニュアル加圧回路1と、マスタシリンダM/Cとは別に設けられた液圧源Pからの圧力が作用する第2ホイルシリンダ5c、5dを有する自動加圧回路2と、車両の状態に応じて停車維持制御を行うコントロールユニットCUと、を有し、コントロールユニットCUは、停車維持制御中に第2ホイルシリンダ5c、5dに圧力を保持させるとともに、ブレーキ操作がなされた場合、第2ホイルシリンダ5c、5dに圧力を保持させた状態で、第1ホイルシリンダ5a、5bにマスタシリンダM/Cからの圧力を作用させることとした。
(もっと読む)
車両用制御装置
【課題】車両の走行に必要な駆動力を確保する車両用制御装置(6,7,8)において、コーナリング中に横方向加速度を受けることをあまり好まない安定嗜好の運転者に対して不安・不快意識を抱かせないようなコーナリングを可能とする。
【解決手段】走行路のコーナの手前位置で、少なくとも車両重量、現在車速、前記コーナの曲率および路面勾配等の情報を収集して、前記コーナを現在車速で走行する際に車両に発生する横方向加速度を推定する推定手段(ステップS1,S2)と、この推定手段の推定結果が予め規定される閾値以上の場合に、安定嗜好の運転者が不安・不快意識を持つ条件が成立したと認識して、駆動力を小側に制御する対処手段(ステップS3〜S6)とを含む。
(もっと読む)
自動二輪車のブレーキ液圧制御装置および車両のブレーキ液圧制御装置
【課題】自動二輪車のブレーキ液圧制御装置および車両のブレーキ液圧制御装置において、マスタシリンダ圧の変動に応じて差圧推定値を適切に補正して正確に算出し、適切にホイールシリンダ圧を付与して適切な制動力を得る。
【解決手段】ブレーキ液圧制御装置は、ホイールシリンダ圧の推定値を取得するホイールシリンダ圧推定値取得手段(ステップ402)と、ホイールシリンダ圧推定初期値を利用してマスタシリンダ圧の推定値を取得するマスタシリンダ圧推定値取得手段(ステップ404)と、ABS制御中のブレーキ液の流動によるマスタシリンダ圧の変動に応じた値である反力補正量を取得する反力補正量取得手段(ステップ406)と、マスタシリンダ圧推定値とホイールシリンダ圧推定値との差に反力補正量を加算してマスタシリンダ圧とホイールシリンダ圧との差圧の推定値を取得する差圧推定値取得手段(ステップ408)と、を備えている。
(もっと読む)
制動装置
【課題】ブレーキペダルの初期操作領域において、操作力を軽減させて操作子の操作フィーリングを良好に確保することができる制動装置を提供する。
【解決手段】制動装置10は、ブレーキペダル12およびマスターシリンダ17を繋ぐ伝達部材75とを備える。伝達部材75は、マスターシリンダ17に連結されるプッシュロッド86の移動量とブレーキペダル12の操作量との比を変化可能な機構である。また、伝達部材75は、ブレーキペダル12の初期位置S4から所定操作量の位置S6までの初期操作領域E2において、プッシュロッド86の移動量に対するブレーキペダル12の操作量の比は、初期操作領域E2の直後の操作領域E3と比較して大きくなるように構成されている。
(もっと読む)
車輌の制動装置
【課題】良好なブレーキペダルの操作感を確保しつつ運転者のペダル踏力の大きさに応じた適切な制動性能を確保すること。
【解決手段】ブレーキペダル23の操作に伴い発生した作動流体の圧力を要求制動力に従って調圧し、調圧後の作動流体の圧力に応じて第1制動力を車輪10FL,10FR,10RL,10RRに作用させる第1制動力発生手段(マスタカット弁32,33等)と、第1制動力が要求制動力に対して不足するときに、その不足分に応じた加圧量で作動流体を加圧して当該加圧量に相当する第2制動力を車輪10FL,10FR,10RL,10RRに作用させる第2制動力発生手段(電動機58や油圧ポンプ59,60等)と、要求制動力に対して第1制動力が不足する場合、運転者によるブレーキペダル23へのペダル踏力が大きいほど第2制動力発生手段の加圧量を増大させる制動制御手段と、を備えること。
(もっと読む)
制動装置
【課題】主電源に失陥などが生じた場合に、操作者に大きな負担をかけることなく、操作子に作用した操作力でマスターシリンダの液圧を高めてブレーキシリンダを作動させることができる制動装置を提供する。
【解決手段】制動装置10は、ブレーキペダル12およびマスターシリンダ17を繋ぐ伝達部材75とを備える。伝達部材75は、マスターシリンダ17に連結されるプッシュロッド86の移動量とブレーキペダル12の操作量との比を変化可能な機構である。また、伝達部材75は、ブレーキペダル12の操作量の後半領域E2においてペダル操作量の増加に応じてプッシュロッド86の移動量に対する操作量の比が大きくなるように構成されている。
(もっと読む)
車両用制御装置
【課題】駆動力または制動力の配分によって車両の走行安定性を高める車両用制御装置において、走行安定性を高める制御が阻害されないようにする。
【解決手段】マイコン10に含まれる目標前輪横力設定部12は、舵角θと車速Vと前輪荷重Ffzとに基づき目標前輪横力Fftを決定し、これに車両の実前輪横力Ffyが一致するようFB制御演算部16は指令値Dcを算出し配分装置駆動回路20に与える。これにより生じる後輪前後力Frxは後輪前後力センサ6により検出され、抑制量演算部38はこの値に基づき抑制量Asを算出し、減算器34は目標転舵角Atからこれを差し引く。転舵比演算部36はこれを転舵比に変換して転舵比可変装置駆動回路40に与える。このことにより車両の転舵が抑制されるので、上記配分により前輪が横滑りしやすくなることがなく、走行安定性を高める制御などが阻害されない。
(もっと読む)
ブレーキ倍力制御装置
【課題】 インライン方式であってもドライバに違和感を与えることなく倍力可能なブレーキ倍力制御装置を提供すること。
【解決手段】 ブレーキペダルストローク量とマスタシリンダ圧が予め設定された関係を維持するように、油圧ポンプ及び/又は液圧制御手段をコントロールすることとした。
(もっと読む)
車両の制動制御装置
【課題】車両の流体圧式制動装置のための制御装置であって、過大なローリング又は横転を抑制する挙動制御が速やかに実行されるよう構成された装置を提供すること。
【解決手段】本発明の車両の制動制御装置は、車両の過大なローリングを抑制するための挙動制御手段と車両の駆動輪の過大な駆動スリップを抑制するための駆動スリップ制御手段とを含み、挙動制御手段により各輪の制動装置が選択的に作動される際には、駆動スリップ制御手段による制動装置のプリチャージ制御を禁止することを特徴とする。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】カーブ通過中の急激な加減速を防止してスムーズにカーブを通過できる新規な車両用走行制御装置および車両用走行制御方法を提供。
【解決手段】カーナビゲーションシステム20からのナビゲーション情報に基づいて算出された目標減速度と、ヨーレートセンサ22のヨーレートから目標減速度を算出された目標減速度とを比較して低い方の目標減速度を選択(セレクトロー)して選択した目標減速度に基づいて減速制御手段を制御すると共に、ヨーレート目標減速度の方が選択された場合には、その最小値を「0」とする。これによって、ナビゲーション情報に基づく減速制御が作動した後に、ヨーレートによる減速制御が作動した場合であっても急激な加減速の変化を防止できるため、スムーズにカーブを通過することができる。
(もっと読む)
安全運転支援方法、車載端末装置、及び運転支援プログラム
【課題】
ドライバの運転操作性を損なうことなくドライバが危険な運転を行おうとした場合には安全運転支援を行う。
【解決手段】
予防安全装置120、130が作動した時、或いは予防安全装置120、130を作動させる車輪速センサ121、ヨーレートセンサ122、ブレーキ圧センサ123のセンサ値が予め設定した閾値を越えた場合に、坂道、非舗装道路、カーブ、駐車場、交差点などの走行場所と、絶対時間、降雪情報、降雨情報、外気温などの走行環境と、車両速度などの車両状態とを車両端末110内の記憶部に記憶しておき、車両が記憶された走行場所を記憶された走行環境下と車両状態で走行しようとした場合に、車載端末110はドライバへの警告通知または車両減速制御によって安全運転支援を行う。
(もっと読む)
車線内走行支援装置、自動車および車線内走行支援方法
【課題】運転者に与える違和感を防ぎつつ、車線内走行を支援すること。
【解決手段】目標走行軌道からの車両位置を基に、操向輪の転舵と、運転者による操舵操作に対する操舵入力手段を介した報知動作とを、それぞれ異なる条件で制御し、車線内走行の支援を行うようにした(ステップS103)。そのため、通常時には、操舵入力手段を介した報知動作を行わず、車線内の目標走行軌道を走行するように操向輪の転舵のみを行い、目標走行軌道からの逸脱度合いが大きいときにのみ前記転舵に加えて報知動作を行って、運転者に車線内を走行させるための支援情報を提供することで、操舵操作と支援情報とを整合させることができ、運転者の違和感を防止しつつ、車線内走行を支援することができる。
(もっと読む)
121 - 140 / 162
[ Back to top ]