
Fターム[3D246JB31]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 増圧制御 (357)
Fターム[3D246JB31]の下位に属するFターム
Fターム[3D246JB31]に分類される特許
101 - 120 / 162
ブレーキ倍力制御装置
【課題】 自動ブレーキ制御を実行している場合であっても、違和感の少ないブレーキペダル操作を達成可能なブレーキ制御装置を提供すること。
【解決手段】 ブレーキペダルの操作力を倍力する倍力装置によってホイルシリンダを加圧して制動力を発生する輪と、この倍力装置以外のアクチュエータによって制動力を発生する輪とを備え、ブレーキペダルとホイルシリンダとを連通させつつ自動ブレーキ制御を行うこととした。
(もっと読む)
停車時後退防止装置

【課題】運転者がアクセル操作により登坂路停車を行おうとした場合でも、自動ブレーキにより当該登坂路停車を実行させて、自動変速機内のクラッチ寿命を延ばす。
【解決手段】登坂路走行中アクセルを釈放し、ブレーキ操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、t1に車速VS=0の停車状態となり、その後t2より、運転者が図示のアクセル開度APOによって停車状態を維持しようとした場合、アクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であるt3までは、ヒルホールド力ブレーキ配分率αを100%に向け一定の時間変化割合で増大させ、t3〜t4間におけるごとくtTd≧Td(θ)であれば、αを一定の時間変化割合で0%へと低下させる。よって、ヒルホールドブレーキ力hTb=tTd×α、および、クラッチ経由車輪駆動力cTd=tTd−hTbはそれぞれ図示のごときものとなり、アクセル操作により登坂路停車を行おうとした場合でも、ヒルホールドブレーキ力hTbにより登坂路停車が可能である。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】車両の制動制御時に用いられる推定車体速度の正確性の向上に貢献できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、前輪に制動力が付与される場合(即ち、第1ブレーキスイッチSW1=「オン」且つ第2ブレーキスイッチSW2「オフ」である場合)に、後輪が路面から浮き上がったリアリフト状態であるか否かを判定する。そして、リアリフト状態になったと判定した場合、ECUは、後輪に対して制動力を付与させるリフト対策制御を実行する。このようにリフト対策制御の実行中において、ECUは、後輪の車輪速度VWRに基づき推定車体速度VSを演算する。
(もっと読む)
ブレーキ制御装置
【課題】 常閉電磁弁の発熱を抑制できるブレーキ制御装置を提供すること。
【解決手段】 運転者のブレーキ操作に応じて演算された目標ホイルシリンダ圧になるように電磁弁(第2増圧制御弁7)を駆動するブレーキ制御装置において、車両の停止状態を判断する停止判断手段(車輪速センサ14)と、電磁弁を駆動するコントロールユニットCUと、を備え、電磁弁は、少なくとも液圧源(ポンプP)とホイルシリンダ5との間に設けられ、閉弁時には液圧をホイルシリンダ5内に閉じ込め、ホイルシリンダ圧が作用する方向に弁体が閉弁する常閉弁であって、コントロールユニットCUは、停止判断時に目標ホイルシリンダ圧の閾値上限を上記演算された目標ホイルシリンダ圧の閾値上限α1に対して増加させることとした(α2>α1)。
(もっと読む)
車間距離制御装置及び車間距離制御方法
【課題】車間距離制御の極低車速域における停止制御の信頼性を向上させる。
【解決手段】先行車との車間距離を目標車間距離とする目標車速を演算し、その目標車速とするための目標制駆動力を演算する車速制御手段と、上記先行車との車間距離を確保しながら自車両を停止させるために必要な大きさの停止制動力を演算する停止制御手段と、を備える。先行車が停止状態であるときに、目標車速が所定車速閾値以下の場合に、上記目標制駆動力による制動から上記停止制動力による制動に切り換える。
(もっと読む)
車両用協調制御システム
【課題】 既存の制御装置に対して大幅な変更を加えることなく、しかも互いに干渉することなく、協調して作動させることのできる車両用協調制御システムを提供する。
【解決手段】 各車両制御装置の出力段に協調制御信号を付加する集中制御装置を設ける。また、集中制御装置が、車両制御装置の選択されたものの入力段に、選択的に作動抑制信号を供給するものとすることにより、各制御装置或いは集中制御装置の失陥に対して簡単に対応することができる。
(もっと読む)
車両のブレーキ制御装置
【課題】エンジンの吸気負圧を低く抑制しつつ、必要な液圧をホイールシリンダに供給できる車両のブレーキ制御装置を提供する。
【解決手段】電子制御スロットルによって目標吸気負圧に制御されるエンジンの吸気負圧を用いてブレーキ操作力を倍力するマスタバックと、該マスタバックで倍力された操作力によってマスタシリンダ圧を発生させるマスタシリンダと、ブレーキ液圧を昇圧するポンプとを備えたブレーキ油圧回路において、前記マスタバックの負圧室の負圧(ブースタ負圧)が大気圧に近いほど小さな閾値を設定し、そのときの要求制動力が前記閾値を超えた場合には、マスタシリンダ圧による制動からポンプアップ圧による制動に切り替える。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】コンプライアンスステアによるトー角変化を抑制して、自車両の走行車線からの逸脱を防止するために必要な目標ヨーモーメントを適切に得る。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向を判定する車線逸脱傾向判定手段(ステップS3、ステップS4)と、車線逸脱傾向判定手段が逸脱傾向があると判定した場合に、車輪の制動力を制御して、左右輪に制動力差を発生させることで車両にヨーモーメントを付与する制動力制御手段(ステップS13、ステップS14)と、車輪に制動力を発生させる際に生じるコンプライアンスステアによるトー角変化を基に、制動力制御手段が車輪に発生させる制動力を補正するコンプライアンスステア用補正手段(ステップS10)と、を備える。
(もっと読む)
車両の障害物検知装置
【課題】車両が障害物と衝突しそうか否かを迅速に判定し且つ障害物検知装置による作動機器の誤作動を抑えつつ、車両が走行車線から逸脱した際の安全性を向上させる。
【解決手段】障害物を検知するレーダ装置1と、レーダ装置1から情報を受けて作動機器7,9,11を制御するコントロールユニット5とを備えた障害物検知装置である。障害物が走行車線内に位置しているか否かを判定する障害物位置判定部5cと、走行車線からの車両の逸脱を予知する逸脱予知部5fと、車両と障害物との衝突を予知する衝突予知判定を行う衝突予知判定部5dとをさらに備えている。衝突予知判定部5dは、障害物位置判定部5cにより障害物が走行車線内に位置していると判定されたときには衝突予知判定を行う一方、障害物が走行車線内に位置していないと判定された場合には、逸脱予知手段5fにより走行車線からの車両の逸脱が予知されたときにのみ衝突予知判定を行う。
(もっと読む)
ブレーキ制御装置
【課題】ペダルフィーリングを向上する。
【解決手段】ブレーキ制御装置10は、ホイールシリンダ54と、ブレーキペダル12と、マスタシリンダ14と、ポンプ22と、リニア制御弁32と、リニア制御弁32に供給する電流を調整して、マスタシリンダ14とホイールシリンダ54との間の差圧を制御するECU200とを備える。ECU200は、差圧を任意の第1差圧から任意の第2差圧まで減少させる場合、差圧を所定の第1時間の間に所定の差圧低減量だけ減少させる第1工程と、差圧を所定の第2時間の間略一定に保持する第2工程とを交互に繰り返しながら、差圧を減少させる。
(もっと読む)
制動力配分制御装置
【課題】積載状態が大きく変化した場合のように各輪の分担荷重比が正しく推定できなくても、制動力が低下して制動距離が伸びることを防止できるようにする。
【解決手段】
4輪のうち車輪スリップが最大の車輪である最大スリップ輪を決定したのち、最大スリップ輪の車輪スリップと制御の対象輪の車輪スリップとの差を演算し、その差に応じた各輪目標制動力補正量を設定する。具体的には、その差が規定値を超えていれば各輪目標制動力補正量の前回値に対して一定増加量を加算することにより各輪目標制動力補正量を増加させ、超えていなければ各輪目標制動力補正量の前回値をそのまま用いることで、車輪スリップの差に応じた応答性にて各輪の車輪スリップが最大スリップ輪の車輪スリップに近づくように目標制動力を高める。
(もっと読む)
車両の制御装置
【課題】ドライバに違和感を与えることなく、他の車両挙動制御装置との協調制御も容易で、車両姿勢を適切に維持する。
【解決手段】メイン制御部100は、入力された各信号を基に各車輪の制駆動力基本値を演算し、各車輪の制駆動力基本値の総和を変化させず、且つ、各車輪の制駆動力基本値の総和で生じるヨーモーメントを変化させることなく、ピッチ角やロール角の車両姿勢を所定に維持する各車輪の制駆動力基本値の補正量を付加制駆動力補正値として演算し、制駆動力基本値と付加制駆動力補正値とに基づき各車輪毎の制駆動力を演算して出力する。
(もっと読む)
ブレーキ制御装置
【課題】車両の押し出されを抑制しつつペダルフィーリングを向上する。
【解決手段】ブレーキ制御装置10は、ブレーキペダルが操作されたときに作動して車輪に制動力を与える液圧ブレーキと、車輪に制動力を与える電動パーキングブレーキと、電動パーキングブレーキの作動を制御するEPB目標制動力設定部207およびEPB制御部208と、ブレーキペダルが操作されているか否かを検出するブレーキスイッチ72と、車両が押し出され状態となったか否かを判定する押し出され判定部202とを備える。EPB目標制動力設定部207およびEPB制御部208は、ブレーキスイッチ72によりブレーキペダルの操作が検出された状態で、押し出され判定部202により車両が押し出され状態にあると判定された場合に、電動パーキングブレーキを作動させる。
(もっと読む)
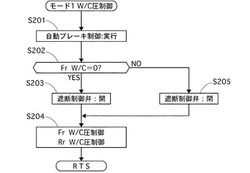
ブレーキ制御装置
【課題】 ブレーキ操作部材を能動的に制御しつつ、小型化を図ることができるブレーキ制御装置を提供すること。
【解決手段】 運転者がブレーキ操作を行うためのブレーキ操作部材(ブレーキペダルBP)と、ブレーキ操作部材に連結し、ブレーキ操作部材の作動に応じてブレーキ液をホイルシリンダW/Cへ送り出すマスタシリンダM/Cと、マスタシリンダM/Cとは別に設けられ、ブレーキ液圧を発生させる液圧源(ポンプP)と、ブレーキ操作部材の作動を能動的に制御することが必要であるか否かを判断する能動制御判断部(図4のS201,202,206,208)と、能動制御判断部の判断に応じて液圧源が発生した液圧をマスタシリンダM/Cに与えてブレーキ操作部材の作動をコントロールする能動制御(S203,204,209,210等)を行うコントロールユニットCUと、を有することとした。
(もっと読む)
車両用制動装置
【課題】制動操作フィーリングの低下を抑制することができる車両用制動装置を提供する。
【解決手段】操作部材21に入力された操作圧力を負圧式の制動倍力手段23により所定の倍力比で倍化させ当該倍化された操作圧力に基づいて車輪に制動力を発生させると共に、少なくとも操作部材21を付勢する付勢手段30の反力と制動倍力手段23の負圧量とに基づいて操作部材21が動き出す荷重が定まる制動手段2と、目標の負圧量である目標負圧量に基づいて制動倍力手段23の負圧量を可変制御する負圧量可変制御手段29と、予め設定される基準の動き出し荷重である基準動き出し荷重に対する実際の動き出し荷重である実動き出し荷重の変化量を検出する検出手段50と、変化量に基づいて目標負圧量を設定する設定手段51とを備える。
(もっと読む)
緊急退避システム、緊急退避方法
【課題】運転者の意識レベルが低下した場合に車両を路肩等に退避させる緊急退避システムにおいて、緊急状態であることを外部から認識可能な緊急退避システム等を提供すること。
【解決手段】運転者の意識レベルの低下を検出して自車両を退避させる緊急退避システム100であって、運転者の状態を検出する運転者状態検出センサ21と、運転者の状態に基づき意識レベルが所定値以下に低下したか否かを判定する意識レベル判定手段41と、意識レベルが所定以下に低下したと判定された場合、自車両の前方の所定距離内に交差点があるか否かを判定する交差点有無判定手段42と、前方の所定距離内に交差点がある場合、交差点が通行可能な否かを判定する通行可否判定手段43と、交差点が通行可能な場合、交差点内に目標停止位置を決定する目標停止位置決定手段44と、目標停止位置に自車両を停止させる制動力制御手段44、45、32と、を有することを特徴とする。
(もっと読む)
制動力制御装置
【課題】作動条件の異なる複数のシステムが同一のブレーキ制御機構を利用する場合において、作動できないシステムを運転者に適切に報知することができる制動力制御装置を提供する。
【解決手段】車両各輪の制動力を制御するブレーキアクチュエータ5を用いて車両挙動を制御するVSC制御部21と、VSC制御部21の作動可否を判定するVSC作動可能判定部22と、ブレーキアクチュエータ5を用いてVSC制御部21によって制御される車両挙動とは別の車両挙動を制御する小回り制御部23と、小回り制御部23の作動可否を操作入力によらずに判定する小回り制御作動可能判定部24と、VSC制御部21が作動できない旨を報知するVSC警告灯4と、小回り制御部23が作動できない旨をVSC警告灯4とは異なる態様で報知する小回り制御インジケータ10とを備える。
(もっと読む)
駐車ブレーキ内蔵ディスクブレーキ
【課題】ブレーキディスクやブレーキパッドの熱膨縮が生じても安定した駐車ブレーキの制動力を確保して車両の実質的な静止状態の維持ができる駐車ブレーキ内蔵ディスクブレーキを提供する。
【解決手段】駐車ブレーキ内蔵ディスクブレーキ100は、常用ブレーキを使用して走行中の車両を制動停止させた場合、ブレーキパッド14はディスクロータ18に押圧されて発熱して膨張する。この状態でPKBを動作させると、ディスクロータ18やブレーキパッド14が冷えて収縮した場合、押圧力が低下する場合がある。そこで、駐車ブレーキ内蔵ディスクブレーキ100は収縮が生じる場合、形状変形部材78aまたは形状変形部材78bを形状変形させてブレーキパッド14の裏金14bに対し押圧力を追加付与して制動力の低下を回避させる。
(もっと読む)
車両挙動制御装置
【課題】車両のアンダーステア状態又はオーバーステア状態の制御性能を良好に維持すること。
【解決手段】車両挙動制御装置10は、車速Vを検出する車速検出手段11と、実ヨーレートψを検出する実ヨーレート検出手段13と、車両が走行する道路のカーブの曲率半径Rを算出するカーブ曲率半径算出手段14と、車速Vとカーブの曲率半径Rとに基づいて目標ヨーレートψTを算出する目標ヨーレート算出手段15と、実ヨーレートψと目標ヨーレートψTとの偏差であるヨーレート偏差Δψを算出するヨーレート偏差算出手段16と、実ヨーレート検出手段13により検出された実ヨーレートψと、ヨーレート偏差算出手段16により算出されたヨーレート偏差Δψと、に基づいて、車両の制動力を制御することで、車両のアンダーステア状態又はオーバーステア状態を制御する制動力制御手段17と、を備えている。
(もっと読む)
車両制御装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御を車両環境に応じて適宜調整し、機能ドメイン制御手段の構成の変更に適応する作業量を低減する車両制御装置およびそれを用いた車両制御システムを提供する。
【解決手段】車両制御装置は、車両が置かれた車両環境に基づいて車両モードを設定し、車両モード毎に、分配する資源と、資源を分配する機能ドメイン制御手段とを決定する(S300)。車両環境は、走行速度、運転者により設定される運転モードである省エネモードおよびスポーツモード等の車両自体に基づいた車両の走行状態と、車両の周囲の天候、走行道路の種別、走行地域、駐車中、車両移送中、盗難等の車両の周辺状況とを表す。車両制御装置は、S300で設定した車両モードを判定し(S302)、車両モードに応じて適切な量の資源を機能ドメイン制御手段に分配する(S304、S306、S308)。
(もっと読む)
101 - 120 / 162
[ Back to top ]