
Fターム[3D246KA01]の内容
ブレーキシステム(制動力調整) (55,256) | 制御回路要素 (1,120) | フィルタ (128)
Fターム[3D246KA01]の下位に属するFターム
Fターム[3D246KA01]に分類される特許
21 - 40 / 52
車両用走行制御装置
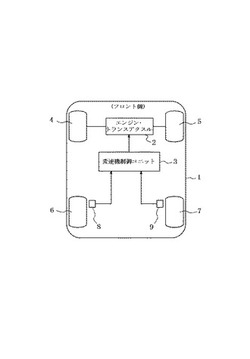
【課題】二輪駆動の車両でも駆動輪のスリップによる誤差を補正値に反映しないようにして、車両の横加速度の推定精度を高めることにある。
【解決手段】車両1の左右の従動輪6,7の車輪速のうち一方の車輪速で他方の車輪速を除した値を補正係数として算出し、前記一方の車輪速に前記補正係数を乗じた値を一方の車輪速補正値として出力し、前記一方の車輪速補正値と前記他方の車輪速とに基づき横加速度を推定するようにした車両用走行制御装置3である。
(もっと読む)
電動車両の制振制御装置

【課題】ブレーキ制動力の発生時、余分な振動抑制補償の出力を抑え、ブレーキ効き感の悪化を防止することができる電動車両の制振制御装置を提供すること。
【解決手段】動力源にモータ/ジェネレータMGを有するFRハイブリッド車両において、ドライバー要求に基づくF/F演算により第1トルク目標値Tm*1を算出する第1トルク目標値算出手段101と、トルク入力−モータ回転数の伝達特性のモデルGp(s)を用いたF/B演算により第2トルク目標値Tm*2を算出する第2トルク目標値算出手段102と、第1トルク目標値Tm*1と第2トルク目標値Tm*2に基づく演算によりモータトルク指令値Tm*とするモータトルク指令値設定手段103と、を備えている。第2トルク目標値算出手段102は、ブレーキ制動力Fbrkを入力し、ブレーキ制動力に対するモータ回転数の伝達関数Gpb(s)によるフィルタを用いてモータ回転数推定値補正量を算出する規範応答補正量算出部102aを有する。
(もっと読む)
電気車制御装置
【課題】ブレーキ指令時の空走時間の短縮と乗り心地の改善とを両立させる。
【解決手段】ブレーキ指令信号の入力時において、フィルタコンデンサ電圧がしきい値電圧未満の場合には十分な回生ブレーキ力が得られるので、回生ブレーキ判定部32は、ハイレベルのダミー許可信号を出力してダミー信号生成部33にダミー信号を出力させる。フィルタコンデンサ電圧がしきい値電圧以上の場合には回生ブレーキ力が不足または失効するのでロウレベルのダミー許可信号を出力してダミー信号生成部33にダミー信号の出力を停止させる。重畳部34は、インバータ制御部29から出力される回生ブレーキ力信号とダミー信号とを重畳しブレーキ力等価信号として出力する。ブレーキ制御装置12は、ブレーキ力指令からブレーキ力等価信号を減算して空気ブレーキ力指令を生成する。
(もっと読む)
姿勢安定化制御装置及び車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とすることである。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
車間距離検出装置および車速制御システム
【課題】超音波を用いた車間距離検出装置において、計測の精度を向上させる。
【解決手段】自車200の前部に設置され、先行車300に対して超音波Sを送信するとともに、先行車300で反射して戻った超音波S′を受信する超音波送受信機10と、超音波Sが超音波送受信機10から送信されてから、反射波としての超音波S′が受信されるまでの経過時間ΔTを計時する計時手段30および経過時間ΔTに基づいて先行車300との間の車間距離Lを算出する距離演算部50を有する距離算出装置20と、を備え、距離算出装置20は、反射波として受信した超音波S′のうち、路面(500)から反射して受信したノイズ成分(S2′)を除去するノイズ信号除去手段40を備え、距離演算部50は、ノイズ信号除去手段40によって除去された後の超音波S′についての経過時間ΔTに基づいて、車間距離Lを算出する。
(もっと読む)
センサ信号を補償するためのシステム及び方法
【課題】センサ信号を補償する。
【解決手段】第1のセンサ110は、車両の第1の条件に対応する第1の信号を生成するように構成される。第2のセンサ115は、車両の第2の条件に対応する第2の信号を生成するように構成される。ファジィ論理モジュール120は、少なくとも第2の信号の信号安定性に基づいて、第1の組の値を出力するように構成される。カルマンフィルタモジュール125は、第1の組の値及び第1の信号を受信すると共に、少なくとも該第1の組の値及び該第1の信号に基づいてセンサ補償信号を推定する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線の認識度が低くても、運転者の運転を支援する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】予め設定した所定時間後の自車両の将来の横位置を予測する。その予測した自車両の将来の横位置が、車線区分線を基準として予め定められた所定の車線幅方向位置よりも自車線中央側からみて外側に位置すると判定すると、自車線中央側に向かうヨーモーメントを車両に付与するように車両制御を開始する。このとき、前記車線区分線を検出できない若しくは認識度が低い場合には、車線区分線を正常に検出しているときと比較して、前記制御を抑制する。
(もっと読む)
車両用減速制御装置及びその方法
【課題】分岐点でのカーブの状態に適合させて、減速制御を実施する。
【解決手段】車両用減速制御装置は、ナビゲーション装置14で地図情報の作成に使用するノード点を複数個用いて、車両前方の走行路の旋回半径を算出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が算出した旋回半径を基に、自車両を減速制御する制駆動力コントロールユニット8と、分岐点判定部61が自車両が走行する走路が分岐路であると判断したとき、該分岐路の所定範囲内のノード点の密度が小さくなるほど、減速制御のための目標減速度の抑制度合いを大きく補正する目標車速補正部62と、を備える。
(もっと読む)
ブレーキ制御装置
【課題】ABS制御等のアプリケーションの実行時においても、ホイールシリンダ圧を目標値により正確に追従させることができるブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置においては、保持弁の上流圧のフィードバック制御に際して、各保持弁の動作状態に応じた限界勾配値が選択され、上流圧の検出値に対してフィルタリング処理が行われる。このため、各輪ごとに保持弁の開閉状態が変化される制御の実行時においても、上流圧の実際の値(実圧が)精度良く推定される。その結果、その実圧推定値をフィードバックさせることにより、各ホイールシリンダ圧をその目標ホイールシリンダ圧に正確に追従させることができる。
(もっと読む)
車両用走行状態推定装置及びその方法、並びに車両検出のヨーレートの補正方法
【課題】自車両が加減速しても、ヨーレートセンサが出力するヨーレート値に基づいて高い精度で自車両の走行状態を推定する。
【解決手段】走行状態推定装置は、車両のヨーレートを検出するヨーレートセンサ3と、ヨーレートセンサ3が検出したヨーレート値をフィルタ処理するフィルタ11と、フィルタ11が出力したヨーレート値を基に、車両の走行状態を推定する走行状態推定部14と、車両の直進走行状態を判定する直進状態判定部13と、車両の加速度又は減速度の何れかを検出する前後加速度センサ4と、直進状態判定部13が車両が直進走行していると判定すると、前後加速度センサ4が検出した車両の加速度又は減速度を基に、フィルタ11の時定数を設定する時定数設定部12と、を備える。
(もっと読む)
バーハンドル車両用リフト傾向判定装置
【課題】車輪の直径の変化に影響されないバーハンドル車両用リフト傾向判定装置を提供する。
【解決手段】前輪車輪速度VFから車体速度Vを推定する車体速度推定部113と、車体速度Vから車体の減速度Aを演算する減速度演算部121と、減速度Aが最低減速度閾値A0を超えているか否かを判定する減速度判定部122と、車体速度Vと後輪車輪速度VRとの速度差DR-Vを演算する車輪速度差演算部114と、速度差DR-Vの今回値と前回値とから車輪速度差変化量ΔDを演算する変化量演算部115と、減速度判定部122により減速度Aが所定の最低減速度閾値A0を超えていると判定され、かつ、車輪速度差変化量ΔDが第1の変化量閾値ΔD1thを超えた時間がリフト傾向判定タイマ閾値TM3th以上となった場合に後輪がリフト傾向にあると判定するリフト傾向判定部151とを備えてバーハンドル車両用リフト傾向判定装置を構成する。
(もっと読む)
電磁弁制御装置及び電磁弁制御方法
【課題】電磁弁の共振に基づく異音の発生を防止できる電磁弁制御装置及び電磁弁制御方法を提供する。
【解決手段】制動装置の液圧回路には、比例電磁弁が設けられている。ECUは、各車輪に制動力が付与されていない場合に、互いに周波数F1,F2,F3の異なる3種類の電気信号を順番に比例電磁弁のソレノイドに出力する。そして、ECUは、マスタ圧センサからの検出信号に基づき、マスタシリンダ圧Pの脈動の大きさを電気信号毎に検出し、マスタシリンダ圧Pの脈動の大きさが最も小さくなる周波数F3の電気信号を特定電気信号に設定する。その後、ECUは、比例電磁弁を作動させる場合には、特定電気信号を比例電磁弁のソレノイドに出力する。
(もっと読む)
ブレーキ制御装置
【課題】零点補正における処理モードを決定するブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置において、制動操作検出部4は、運転者の制動操作を検出する。車両振動検出部202は、車両の状態を検出する車両状態検出部2の出力をもとに、車両の振動を検出する。補正制御部204は、車両の振動に応じて、零点補正部208における補正処理モードを決定する。制動力決定部212は、補正制御部204により決定された補正処理モードにしたがって零点補正部208が出力する零点をもとに、制動操作検出部4の出力から目標制動力を決定する。
(もっと読む)
車両用ブレーキ力保持制御装置
【課題】適切な保持圧で車両の停止状態を維持する。
【解決手段】車両用ブレーキ圧保持制御装置は、車両の前後方向の加速度を検出する加速度センサ93の出力値を取得する加速度取得手段22と、加速度センサ93の出力値の、車両の前方に相当する向きへの変化を制限する第1のフィルタ23Aと、車両のギア位置が前進ギアか否かを判定するギア位置判定手段24と、ギア位置判定手段24で判定されたギア位置が前進ギアである場合には、第1のフィルタ23Aで処理され出力された第1の加速度フィルタ値Afを保持圧PHに換算する換算手段25と、保持圧PHに基づきブレーキ圧の保持を実行する保持実行手段29とを備える。
(もっと読む)
ブレーキ液圧制御装置
【課題】ブレーキ液圧制御装置において、圧力センサ、電磁弁、ポンプ駆動用モータに接続される制御系を安価かつ容易に交換する。
【解決手段】ブレーキ液圧制御装置15は、複数の電磁弁(31など)が第1の面21aに配設され、ポンプ34a,44aを駆動するモータ34bが第2の面21bに取付けられたハウジング21と、前記電磁弁およびモータ34bを制御するメインECU18を含んで構成されハウジング21に着脱可能な第1ユニットUcと、第2の面21b側に配設され液圧を検出する圧力センサP1と、第2の面21b側から第1の面21a側に延在する導電部材であって、モータ34bおよび圧力センサP1と電気的に接続可能な端部を第2の面21b側に有する導電部材51bと、その導電部材の第1の面21a側の端部がメインECU18に着脱可能な接続部22と、を備えている。
(もっと読む)
車両の横加速度設定装置
【課題】スリップし易い路面状況や異径タイヤが装着されている場合であっても、車輪速検出手段で検出した車輪速に基づいて、実際の横加速度に近い推定横加速度を設定できるようにする。
【解決手段】前側左右輪の車輪速差に基づいて前輪側推定横加速度GFを設定し、後側左右輪の車輪速差に基づいて後輪側推定横加速度GRを設定し、この前輪側推定横加速度と後輪側推定横加速度とに基づいて前後輪平均推定横加速度GAを設定する(S2)。次いで前輪側推定横加速度GFと後輪側推定横加速度GRとの差の絶対値と第1の設定値Aとを比較する(S4)。そして、|GF−GR|<Aの場合、後輪側推定横加速度GRと前後輪平均推定横加速度GAとを比較し、何れか大きい値を推定横加速度Gyとして設定する(S7)。
(もっと読む)
車両用ブレーキ装置
【課題】 電動液圧発生手段が発生するブレーキ液圧を電動モータの回転角フィードバックで制御する場合に、前記回転角と発生するブレーキ液圧との関係を一定に維持する。
【解決手段】 スレーブシリンダ23に目標ブレーキ液圧を発生させるべく、ストロークセンサSbの出力に基づいて電動モータ32の目標回転角を算出し、その目標回転角に実回転角が一致するようにフィードバック制御するので、液圧センサがブレーキ液圧を検出するタイムラグを補償してスレーブシリンダ23の制御応答性を高めることができる。この場合、ブレーキキャリパの剛性の変化やブレーキパッドの摩耗のような経年変化により、電動モータ32の回転角とスレーブシリンダ23が実際に発生するブレーキ液圧との関係が変化するが、スレーブシリンダ23が発生した実ブレーキ液圧に基づいて電動モータ32の目標回転角を補正するので、前記回転角と実ブレーキ液圧との関係を一定に維持することができる。
(もっと読む)
トレーラ牽引車両の制御方法、車両の揺動検出方法および車両
【課題】
本発明は、車両の揺動を検出し、必要に応じて適切に車両および/またはの揺動を低減させる車両の揺動検出・低減装置およびその方法を提供することを目的とする。
【解決手段】
トレーラの揺動力が車両に作用しているか否かを判定し、車両に当該揺動力が作用している場合には、車両のエンジントルクを減少させ、車両のそれぞれの車輪WHfr、WHfl、WHrr、WHrlに独立した制動力を供給することによって、車両および/または揺動を低減させる。
(もっと読む)
原動機付き車両の坂道発進アシスト方法
本発明は、クラッチと、車両のクラッチと駆動輪との間のトランスミッションと、を備える原動機付き車両の坂道発進アシスト方法、及び関連する装置に関するものであり、前記方法では、前記車両を不動位置に保持するためのクラッチのトルクを、既知のエンジントルクに基づいて求め、前記クラッチの前記トルクは、前記エンジントルクのうち、前記クラッチ以外の前記車両の構成手段の動作に専ら利用される部分を考慮に入れることにより求めることを特徴とする。 (もっと読む)
車両の自動ブレーキ制御装置
【課題】自動ブレーキの作動中において障害物検出手段の検出不能と障害物の移動に起因する急な消失とを的確に判別し、判別結果に応じて自動ブレーキの継続または解除を適切に実行できる車両の自動ブレーキ制御装置を提供する。
【解決手段】先行車との衝突回避する自動ブレーキ中においてレーザレーダが先行車を非検出状態になったとき、衝突までの予測時間から求めた補正後衝突予測時間Taの経過以前に衝突したときには(S18がYES)、レーザレーダの非検出状態が自車のノーズダイブにあると見なして自動ブレーキを継続して衝撃緩和を図り(S20)、衝突せずに補正後衝突予測時間Taが経過したときには(S16がYES)、レーザレーダの非検出状態が先行車の右左折による消失にあると見なし、自動ブレーキを解除して後続車の追突を防止する(S10)。
(もっと読む)
21 - 40 / 52
[ Back to top ]