
Fターム[3D301AA17]の内容
車体懸架装置 (72,824) | 目的、機能 (15,449) | 操安、乗心地制御 (6,736) | 接地荷重、接地性、グリップ、タイヤの摩擦円 (474) | 路面入力/凹凸による接地荷重変動 (119)
Fターム[3D301AA17]に分類される特許
1 - 20 / 119
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
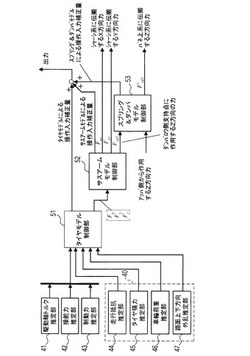
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
サスペンション制御装置

【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
作業車
【課題】走行機体がサスペンション機構を介して走行装置を支持する作業車において、走行機体の対地高さを所定高さに維持させることができるとともに耐久性および応答性で優れたものにする。
【解決手段】サスペンション機構の作動を機体上昇側及び機体下降側に変更自在な作動変更手段を備え、サスペンション機構の作動の昇降変位を検出する昇降検出手段41による検出情報を基に、サスペンション機構の作動が目標範囲側に移動するように作動変更手段を操作する制御手段40を備えてある。サスペンション機構が作動停止状態になると、サスペンション機構の作動が目標範囲側に移動するように作動変更手段を昇降検出手段41による検出情報に基づく制御手段40の制御に優先して操作する補助制御手段45を備えてある。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】操舵操作を行ったときに、ロール挙動が増大することを抑制可能とすること。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分である前輪荷重の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、前輪荷重の変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し合計値を基にドライバ要求トルクを補正する。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】輪荷重の変動を抑制しつつ、操舵応答性の向上およびロール挙動の抑制を可能とする。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、当該変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し、合計値を基にドライバ要求トルクを補正する。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】バネ上が高い周波数で小さく振動するときにも振動を吸収するようにスカイフック制御することが可能な減衰力可変ダンパの制御装置を提供することを課題とする。
【解決手段】ダンパ1aのバネ上速度が高いほどダンパ1aの減衰力が高くなるように減衰力制御量を設定し、バネ上速度の方向とダンパ1aのストローク速度の方向が同方向の場合に、減衰力制御量に基づいて減衰力を制御するスカイフック制御を行う減衰力可変ダンパ1の制御装置20とする。そして、ストロークセンサ14が検出するストローク変位に基づいて算出されるダンパ1aの振幅が小さくなるにつれて、ダンパ1aの減衰力が低くなるように減衰力制御量を補正することを特徴とする。
(もっと読む)
操縦安定性能評価方法
【課題】タイヤの操縦安定性能試験において、被検体のタイヤを装着した車両のダンパーのフリクションを変化させて車両に装着されたタイヤの操縦安定性能の評価を精度良く行うことを可能にする操縦安定性能評価方法を提供する。
【解決手段】車両の備えるダンパーのフリクションを変化させて車両に装着されたタイヤの操縦安定性能を評価する方法であって、ダンパーと電気的に導通する車両の一部に設けられる電気ノイズ印加手段によりダンパーに電気ノイズを印加した後にタイヤの操縦安定性能を評価する。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下関連制御量の位相遅れを低減する。
【解決手段】 周期設定部170は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ上減衰制御力演算部110の演算周期Tbを長くし、バネ下減衰制御力演算部120、慣性力演算部130、制振制御力演算部140、目標モータ力演算部150の演算周期Twを短くする。また、通信部160の通信周期Tsも短くする。これにより、マイクロコンピュータの高スペック化を図らなくても、慣性補償制御を適切に行うことができる。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
サスペンション装置
【課題】大荷重および微振動の双方を的確に吸収するサスペンション装置を提供する。
【解決手段】シリンダ26に衝撃が加わりシリンダ26が上方へ変位すると、コイルスプリング22は圧縮され、ピストンロッド28はシリンダ26内に没入するもののピストンロッド28も上方に変位する。この変位により、アッパープレート34とインシュレータ金具30との間のゴム部材32が圧縮され、衝撃が吸収される。ゴム部材32の圧縮で衝撃が吸収しきれない場合に、コイルスプリング22が圧縮されつつシリンダ26が上方に変位すると共に、ピストンロッド28がシリンダ26内に没入し、バンプストッパ24の下端24Bとシリンダ26の上端26Aとが当接し、上限位置に位置するバンプストッパ24はピストンロッド28およびシリンダ26と共に上方に変位される。上方への衝撃は、バンプストッパ24が圧縮されることにより吸収される。
(もっと読む)
フォークリフト
【課題】車体の地上高さや駆動輪の輪重等を簡単に調整できるようにする。
【解決手段】駆動輪10を上下に揺動するためのドライブシリンダ11と、補助輪20を上下に揺動するためのキャスタシリンダ21と、ドライブシリンダ11の第1室とキャスタシリンダ21の第1室とを接続する第1管路31と、ドライブシリンダ11の第2室とキャスタシリンダ21の第2室とを接続する第2管路32と、作動油ポンプ81と制御弁73,74,75との間を第1管路31に接続する第3管路91と、第3管路91を開閉する切換バルブ90とを備え、制御弁73,74,75は、アンロード状態のときに絞り回路が構成されるようになっており、センサー94の検出結果に基づいて、制御弁73,74,75がアンロード状態のときに、作動油ポンプ81を駆動して切換バルブ90を開く調整動作を行う。
(もっと読む)
車両用発電サスペンションダンパ装置
【課題】車両のロール共振周波数付近でもオイルダンパと同程度以上のダンパ性能を発揮するとともに走行路面の凹凸に対しては必要以上にダンパが硬くならないダンパ性能が制御される車両用発電サスペンションダンパ装置を得る。
【解決手段】車両用発電サスペンションダンパ装置は、路面の凸凹に伴う車輪の振動を車体に伝えないように振動を緩衝する車両用発電サスペンションダンパ装置において、Duty比100%で動作されるとき車両のロール共振周波数付近でオイルダンパと同程度以上にサスペンション軸を伝搬する振動を緩衝する発電機と、上記発電機をDuty比が0%から100%の間で動作させる発電回生制御装置と、を備える。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
アクチュエータの作動制御装置
【課題】 プレビュー制御の制御性能の悪化が抑えられるアクチュエータの作動制御装置を提供すること。
【解決手段】 プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するためのデータ記憶位置iが演算される。そして、RAM54の記憶領域541のうち演算されたデータ記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。
(もっと読む)
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、そのキングピンオフセットδkと、キングピン頃角θkと、キャスタオフセットδcと、キャスタ角θcとが、δc・tan(θk)+δk・tan(θc)≦α(ただし、αはサスペンション構造に応じて設定した0近傍の値)なる関係を満たすように構成した。
(もっと読む)
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、そのキングピンオフセットδkと、キングピン頃角θkと、キャスタオフセットδcと、キャスタ角θcとが、δc・tan(θk)+δk・tan(θc)≦α(ただし、αはサスペンション構造に応じて設定した0近傍の値)なる関係を満たすと共に、車輪が中立位置にあるときに、キャスタオフセットδcが、車輪の垂直軸周りのモーメントと車輪の横力との比から、設定した範囲内にあるように構成した。
(もっと読む)
車両の圧電変換機能付きエアサスペンション装置
【課題】本発明は、エアスプリングのショック吸収時における大なる振動エネルギーから、車載の電気機器に利用できる電力を確保可能とした車両の圧電変換機能付きエアサスペンション装置を提供する。
【解決手段】本発明は、シャシフレーム1とアクスル14との間に介在させたエアサスペンション用エアスプリング15の内部に、路面振動のショックを吸収するときに生ずる圧電効果により交流の電力が発生する圧電素子30を設け、この圧電素子30で発生した電力を車両に搭載される電気機器の動力源となる蓄電池40に供給する。同構成により、これまで廃棄されていたエアスプリング15のショック吸収時の大なる振動エネルギーが、圧電素子に30より電力に変換され、蓄電池40に蓄えられ、同蓄電池40に蓄えられた電力が、車載の電気機器6に利用される。
(もっと読む)
車両用サスペンション制御装置
【課題】 車両走行時の「コトコト音」の発生を抑えることができると共に、車両の乗り心地を向上することができるようにする。
【解決手段】 車両の車体1と車輪2との間に減衰力調整式のショックアブソーバ6を設ける。コントローラ10は、加速度センサ8と車高センサ9からの検出信号に従って制御信号をショックアブソーバ6のアクチュエータ7に出力し、ショックアブソーバ6の減衰力特性をハードとソフトとの間で可変に制御する。この場合、コントローラ10は、車高センサ9からの信号により車体1、車輪2間の上,下方向の相対速度を求める。そして、この相対速度の変化からショックアブソーバ6が伸び行程と縮み行程との間で行程が反転するときを判別し、行程反転時に前記減衰力特性をソフト側に変更する構成とする。
(もっと読む)
車両統合制御装置
【課題】車両安定性制御装置とサスペンション制御装置とを統合して、車両の走行安定性を高める。
【解決手段】オーバーステア時には、旋回外側の前輪3に制動力F1を加えて、車両1に旋回内向きのモーメントを発生させ、また、アンダーステア時には、車両1の旋回内側の後輪4に制動力F2を加えて、車両1に旋回外向きのモーメントを発生させると共に、旋回外側の前後輪3,5に適度な制動力F3,F4を加えて、車両1を減速させることによって車両1の安定性を確保する。このとき、制動力が加えられた車輪に対して、縮み側減衰力を大きくし、伸び側減衰力を小さくし、かつ、懸架ばねのばね力を小さくする。同時に、その他の車輪に対応する縮み側減衰力を小さく、伸び側減衰力を大きくする。これにより、制動力が加えられた車輪の接地荷重を大きくすることができ、車両安定性を向上させる。
(もっと読む)
クロス連結型可変ピストンエアサスペンション
【課題】 クロス連結型可変ピストンエアサスペンションを提供する。
【解決手段】 エアサスペンションが、各々がピストンエアバッグおよび主エアバッグを含む第1および第2の空気ばねアセンブリを含む。第1の流体接続が、第1の空気ばねアセンブリの第1のピストンエアバッグおよび第1の主エアバッグの一方を、第2の空気ばねアセンブリの第2のピストンエアバッグおよび第2の主エアバッグの一方に接続する。第2の流体接続が、第1のピストンエアバッグおよび第1の主エアバッグの他方を、第2のピストンエアバッグおよび第2の主エアバッグの他方に接続する。第1および第2の流体接続を通る空気流が、道路負荷入力にのみ応答してパッシブ制御されることで、ロール剛性を低減し、アーティキュレーションを高める。
(もっと読む)
1 - 20 / 119
[ Back to top ]