
Fターム[3D301AA90]の内容
Fターム[3D301AA90]に分類される特許
1 - 20 / 46
サスペンション制御装置
【課題】サスペンションのストローク速度の推定精度を向上可能とする。
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
車両用懸架装置

【課題】 小型化が図れ、車体側の形状やサスペンションのレイアウト変更などを検討することなく、車両への搭載を容易にすることができる車両用懸架装置を提供する。
【解決手段】 この車両用懸架装置は、ボールねじ4、増速機構5、および電磁モータ式の抑制力発生器6を有し、ボールねじ4のシャフト7の直線運動をボールねじナット8の回転運動に変換し、この回転運動を増速機構5を介して増速して抑制力発生器6のモータロータ29に伝達し、抑制力発生器6が前記回転運動を抑制する方向の力を発生することでシャフト7の直線運動を抑制する電磁モータ式緩衝器を用いたものである。前記ボールねじ4、増速機構5、および抑制力発生器6のうちのいずれかを構成する一つまたは複数の部品が、前記ボールねじ4、増速機構5、および抑制力発生器6のうちの2つ以上を構成する部品として共有化されている。
(もっと読む)
車高調整方法及び車高調整装置
【課題】人の乗車や荷物の積載時であっても、車高を調整することで車両の操縦安定性能や乗り心地等の動的なバランスが最適となるように車両の姿勢を制御可能とする車高調整方法及び車高調整装置を提供する。
【解決手段】少なくとも1輪に車高の調整を可能とする車高調整手段が設けられた車両のいずれかの1輪を加振手段により0〜6Hzの周波数の範囲で変化させながら上下方向に加振して当該車両全輪の輪荷重値の変化を測定し、加振の周波数と、測定された各輪の輪荷重値に基づいて車両のピッチロール伝達特性を設定し、当該ピッチロール伝達特性におけるゲインのピークとなる周波数より1Hz分周波数が高いときのピッチロール伝達特性における位相がゼロに近づくように車高調整手段を制御する。
(もっと読む)
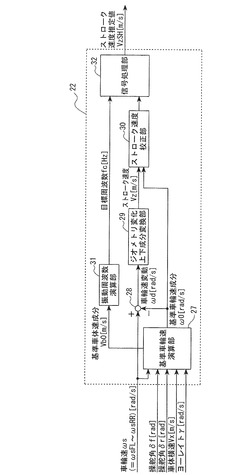
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsが含んでいる成分のうち、サスペンションのストロ−クに伴う車輪14の車両前後方向への変位に起因する成分である車輪前後変位成分ωzyに基づいて、サスペンションのストロ−ク速度Vzを推定する。そして、推定したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。この構成によれば、例えば、サスペンションがストロ−クすると、車輪14に車両前後方向への変位が発生するところ、サスペンションのストロ−クに伴う車輪前後変位成分ωzyに基づくことで、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
車輪給電装置
【課題】直流電源から電磁給電部を経て車輪側モータへ電力を供給する際、モータ駆動用のインバータ以外に、交流・直流変換用のコンバータが不要な構成となす。
【解決手段】モータ4L,4Rに係わる電磁給電部20L,20Rのコイル14L,14Rはそれぞれ、対応する側のモータ4L,4Rを個々に駆動しつつ出力制御するためのインバータ22L,22Rを介して相互に接続した後、共通な給電回路23により、電源21に接続する。電源21から供給される電力は、インバータ22L,22Rにより交流に変換された後、モータ4L,4Rに係わる電磁給電部20L,20Rのコイル14L,14Rにそれぞれ供給される。コイル14L,14Rは、交流電流の供給により磁束を発生し、コイルで発生した磁束は、モータ4L,4Rに係わるコイル16L,16Rに鎖交し交流の起電力を発生させる。これら交流起電力はそれぞれ、モータ4L,4Rを個々に駆動する。
(もっと読む)
リーチ式フォークリフト
【課題】運転席の床面積を確保、および、床面の低床化を両立することができるリーチ式フォークリフトを提供する。
【解決手段】駆動輪31を有するドライブユニット30を、車両本体10に対して上下方向に相対移動可能に支持する上部アーム51と、補助輪41を有するキャスタユニット40を、車両本体10に対して上下方向に相対移動可能に支持するキャスタアーム42と、ドライブユニット30とキャスタユニット40との間の上下方向の相対移動が逆方向になるように上下方向の相対移動を相互に伝達する下部アーム52とを備え、下部アーム52にリーチシリンダ24の上端が内部に進入可能な凹部52Dを設けたことにより、リーチシリンダ24と下部アーム52との干渉を回避できると共に、車両本体10の左右方向にわたって、リンク機構50およびリーチシリンダ24を配置する際に要する空間高さを低くできる。
(もっと読む)
車高調整装置
【課題】車体におけるバネ下重量の増加を抑制し、設計上の制約を受けることのない小型軽量化した車高調整装置を提供する。
【解決手段】車体とバネ下部材との間に介挿されるスプリングを伸縮させて車体の車高を調整する車高調整装置であって、スプリングの一端側が着座する着座部と、当該着座部の反対側に形成され、周方向に沿って漸次傾斜する傾斜面とを有する第一の円環体と、第一の円環体における傾斜面と合致する傾斜面を有し、回転駆動手段と接続されて第一の円環体に対して回転する第二の円環体とを備えるようにした。
(もっと読む)
車両用懸架装置
【課題】車両用懸架装置において、ショックアブソーバを比較例に比して下方に配置して立設することが可能であり、室内スペースを十分に確保すること。
【解決手段】車両用懸架装置は、車輪11を回転自在に支持するナックル12がアッパアーム13とロアアーム14によって車体に連結されている。ロアアーム14のナックル側端部には、ショックアブソーバ17の下端部17aを上下方向にて挿通可能な挿通部14aが設けられている。ナックル12とロアアーム14の連結部位P1より下方にて、ショックアブソーバ17の下端17aがナックル12に連結P2されている。
(もっと読む)
振動系における機械的動力損失を測定する方法
【課題】自動車のエンジンマウントやサスペンション等の振動絶縁装置又は緩衝装置の設計支援するため、振動系における機械的動力損失を測定する方法を提供する。
【解決手段】この系は、線形時不変であり、かつ、定常状態であると仮定する。この方法は、振動系と振動系の外側の部品との間の接続点を識別するステップを含む。窓付き時間領域において各接続点における加速度を測定し、窓付き時間領域に対して各接続点における力も決定する。高速フーリエ変換により時間領域値を周波数領域値に変換し、周波数領域加速度値を速度値に変換する。振動系の動力損失は、振動系へのパワーフローの1/2の合計に等しい。この場合、各パワーフローは、時間窓ごとの周波数領域において接続点における複素共役速度×力の積の実数部の1/2である。
(もっと読む)
懸架装置
【課題】 単筒型緩衝器を備える懸架装置において、搭載性及び応答性を向上させ、気室内に作動流体が漏れること及び異音の発生を防止することを目的とする。
【解決手段】 懸架ばね3と共に懸架装置を構成する緩衝器2がシリンダ4と、ロッド5の先端に保持されてシリンダ4内を二つの作用室A,Bに区画するピストン6と、ロッド5の基端側に連設されるリザーバタンク7とを備え、リザーバタンク7内が隔壁膜8で作用室Bに連通する作動流体室Cと気室Dとに区画され、作動流体室Cの径方向の断面積が作用室A,Bの径方向の断面積よりも大きく形成され、緩衝器2がリザーバタンク7を介して車体側若しくは車輪側に連結される。
(もっと読む)
エアサスペンション装置
【課題】 エアサスペンション装置の全体構成が複雑化することを回避しつつ、車体設計の自由度を損なうことなくロール剛性の強化にともなうバネ下重量の増加を抑制する。
【解決手段】 アクスルハウジング2に取り付けた前後方向に沿う左右一対のサスペンションビーム3と車体フレーム5のサイドメンバ6とをエアスプリング7を介して結合する。車体フレーム5とアクスルハウジング2の上部とをアッパリンク9を介して連結する。アクスルハウジング2の前方に配した第1スタビライザ10をサスペンションビーム3に保持させてそのアーム部12の先端をサイドメンバ6から垂下させたブラケット13の下端に枢着する一方、アクスルハウジング2の後方に配した第2スタビライザ14を車体フレーム5に保持させてそのアーム部16の先端をサスペンションビーム3に枢着したことにより、両スタビライザで所定のロール剛性を確保するようにした。
(もっと読む)
外力検出が可能な防振装置
【課題】入力荷重の高精度な検出を、充分な耐久性および実用性をもって実現することが可能とされた、新規な構造の外力検出が可能な防振装置を提供することにある。
【解決手段】誘電性の弾性材からなる誘電体層34の両面に対して導電性の弾性材からなる一対の電極膜36a,36bを設けた静電容量型センサ32を用い、静電容量型センサ32の一方の端部を第1の取付部材12に固定すると共に他方の端部を第2の取付部材14に固定して、外力作用による本体ゴム弾性体16の弾性変形に際して静電容量型センサ32に本体ゴム弾性体16から独立した引張変形が生ぜしめられるようにした。
(もっと読む)
サスペンション挙動推定方法
【課題】サスペンション機構の挙動を正確に把握する。
【解決手段】サスペンション挙動評価システムにおいて、解析条件取得部は、車両本体に対する鉛直方向への車輪の変位、および車輪の転舵角度を取得する。挙動推定部は、取得した車輪の変位および転舵角度を利用して、ボールジョイント36の基準スタッド軸z回りの第1揺動角θ1と、ボールジョイント36の基準垂直軸x回りの第3揺動角θ3と、を算出する。挙動推定部は、算出された第3揺動角θ3を利用して、ボールジョイント36の基準スタビライザリンク軸y回りの第2揺動角θ2を算出する。挙動推定部は、算出された第1揺動角θ1、第2揺動角θ2、および第3揺動角θ3を利用してサスペンション機構の挙動を推定する。
(もっと読む)
インホイールモータ車両のサスペンション装置
【課題】インホイールモータユニットの直径を小さくしなくても、最低地上高を確保しつつ、サスペンションメンバ取り付け部材のスペースを要求通りにし得るようになす。
【解決手段】ロアサスペンションメンバ4の車輪側取り付け点4c,4dをインホイールモータユニット2の最下円周部位よりも車両前後方向前側部位および車両前後方向後側部位に配置し、ロアサスペンションメンバ4の車輪側取り付け点4c,4dがインホイールモータユニット2の下方に出っ張ることがないようにする。よって何れのサスペンションメンバ3,4の車輪側取り付け点も、インホイールモータユニット2より低い位置になることがないため、インホイールモータユニット2の直径を小さくしなくても、最低地上高を確保しつつ、サスペンションメンバ取り付け部材のスペースを要求通りのものにすることができる。
(もっと読む)
サスペンション仕様評価装置
【課題】実際に即した非線形のサスペンション特性に基づいて、操舵安定性に優れたサスペンションモデルの仕様を決定できるようにする。
【解決手段】車両モデル設定処理部11は、車両モデルを構築すると共に、前輪サスペンションモデル及び後輪サスペンションモデルを複数の仕様データ毎に構築する。ロールモード解析処理部12は、仕様毎の前輪及び後輪のサスペンションモデルの組合せ毎に、車両モデルに作用するロール角ゼロにおけるピッチレートをロールモードの代用として求める。そしてこの代用ロールモードがゼロに最も近い特性を示すサスペンション仕様の組合せを、操舵安定性に優れているサスペンションモデルとして選択する。
(もっと読む)
車両の挙動を特徴付けて向上させる方法
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、そのキングピンオフセットδkと、キングピン頃角θkと、キャスタオフセットδcと、キャスタ角θcとが、δc・tan(θk)+δk・tan(θc)≦α(ただし、αはサスペンション構造に応じて設定した0近傍の値)なる関係を満たすと共に、車輪が中立位置にあるときに、キャスタオフセットδcが、車輪の垂直軸周りのモーメントと車輪の横力との比から、設定した範囲内にあるように構成した。
(もっと読む)
車両空気力算出装置、車両運動解析装置及び車両サスペンション制御装置
【課題】車両が受ける空気力の作用について、さらに適切な解析を可能とすることである。
【解決手段】車両空気力算出装置10は、コンピュータで構成され、その記憶部18には風洞実験等によって得られた加速度項係数のデータ20等が記憶される。CPU12は、解析条件を取得する条件取得処理部24と、記憶部18に記憶される加速度項係数を用いて車両に作用する空気力の動的空力モデル化を行うモデル化処理部26と、車両に作用する空気力を外力としてその変動成分に関する算出を行う変動成分算出処理部28と、算出された変動成分に基づいて、車両に作用する外力をそれぞれ算出する作用量算出処理部30を含む。さらに、算出された空気力による外力を車両の運動方程式に組み込み車両の運動解析を行うこともでき、車両サスペンション制御を行うこともできる。
(もっと読む)
波状路検出装置
【課題】市場に存在する波状路を正確に判断して容易に見つけ出すことを目的とする。
【解決手段】予め定めた加速度x(G)以上のバネ下加速度の変分を累積して(100〜104)、サンプリング毎に差分、すなわち傾きを算出する(106)。そして、傾きの検出結果が、予め定めた加速度y(G)以上が所定時間t秒以上継続し、かつ所定の車速α(km/h)以上か否かを判断することにより(108〜112)、連続性のある波形か以内かを判断し、連続性のある波形の場合に波状路と判断する(114)。
(もっと読む)
サスペンション挙動推定方法
【課題】サスペンション機構の挙動を正確に把握する。
【解決手段】サスペンション挙動評価システムにおいて、解析条件取得部は、車両本体に対する鉛直方向への車輪の変位、および車輪の転舵角度を取得する。挙動推定部は、取得した車輪の変位および転舵角度を利用して、第1ボールジョイント24の基準スタッド軸z回りの第1揺動角θ1と、第1ボールジョイント24の基準垂直軸x回りの第3揺動角θ3と、を算出する。挙動推定部は、算出された第3揺動角θ3を利用して、第1ボールジョイント24の基準タイロッド軸y回りの第2揺動角θ2を算出する。挙動推定部は、算出された第1揺動角θ1、第2揺動角θ2、および第3揺動角θ3を利用してサスペンション機構の挙動を推定する。
(もっと読む)
1 - 20 / 46
[ Back to top ]