
Fターム[3F027DA34]の内容
コンベアの制御 (2,779) | 目的 (875) | 危険、異常発生時の制御、安全 (209) | 異常搬送、異常運転に対する制御 (78) | 被搬送物のつまり、かみ込み (12)
Fターム[3F027DA34]に分類される特許
1 - 12 / 12
缶体搬送状態異常検出装置
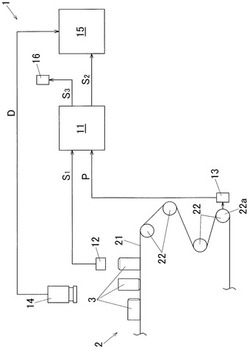
【課題】缶体の搬送状態の誤検出をなくして、搬送状態の異常を確実に検出することができる缶体搬送状態異常検出装置及び缶体搬送状態異常検出方法を提供する。
【解決手段】缶体搬送状態異常検出装置1は、コンベア21に載置されて下流側に搬送される缶体3の搬送状態を判定し、前記コンベア21の搬送速度に対応した基準信号Pを出力する基準信号出力部13と、前記缶体3の搬送状態を監視し、前記缶体3の搬送状態を示す搬送信号S1を出力する搬送状態監視部12と、前記搬送状態監視部12から入力された前記搬送信号S1に基づいて前記缶体3の搬送状態の異常を検知すると、前記搬送信号S1および前記基準信号Pに基づいて、異常が検知された前記搬送信号S1の直近の所定期間内で異常と判定された時間の積算時間が所定時間を超過している場合に、前記缶体3の搬送状態が異常であると判定する異常搬送判定部11と、を備える。
(もっと読む)
搬送速度算出装置および搬送速度算出方法

【課題】搬送速度に加えて、被搬送物が何個連なっているのかを把握する。
【解決手段】エア搬送装置により被搬送物(PB)を搬送し、被搬送物を搬送方向における被搬送物の幅方向最大箇所が通過する平面上に配置された第一投光器(31a)から投光されて、第一受光器(31b)により受光される光が被搬送物の搬送方向における幅方向最大箇所により遮光された遮光回数及び遮光時間を第一記録部(21)に記録し、幅方向最大箇所とは異なる幅方向箇所が通過する平面上に配置された第二投光器(32a)から投光されて、第二受光器(32b)により受光される光が被搬送物の搬送方向における幅方向最大箇所により遮光された遮光回数及び遮光時間を第二記録部(22)に記録し、第一及び第二記録部により記録された遮光回数及び遮光時間に基づいて、搬送される被搬送物の搬送速度と、に加えて、被搬送物が何個連なっているのかを算出する。
(もっと読む)
バケットエレベータ内部の結露または粉体の付着を予測及び検出する方法及び装置とそれに用いられる測定ユニット
【課題】高価な購入品、複雑な制御を必要とせず、簡便なセンサと制御で、バケットエレベータ内部への搬送物の堆積、付着量の増加を予測、検知する技術を提供する。
【解決手段】バケットエレベータ8のケーシング9にセンサユニット4を設置する。このセンサユニット4は、内部の水分値を測定する水分測定手段と、雰囲気温度を測定する雰囲気温度測定手段と、大気温度を測定する大気温度測定手段とを備える。また、粉体を搬送するための駆動手段の電流値を測定する電流値測定手段を設け、これらの水分値、雰囲気温度、大気温度及び電流値の関係から、結露や粉体の付着の有無を判断する。
(もっと読む)
配管詰まり検知装置及び配管詰まり検知方法
【課題】投入物の流量、質の変化によらず、安定して配管の詰まりを検知できる検知装置を提供する。
【解決手段】本発明の配管詰まり検知装置1は、ごみ焼却炉2の投入配管3に設けられたものであり、この配管詰まり検知装置1は、配管の管壁に取り付けられた複数の振動センサ7A,7B,7Cと、この複数の振動センサ7A,7B,7Cにより検出された振動がそれぞれ異なるタイミングで低減した際に、配管に詰まりが発生したと判定する判定部8とが備えられている。振動センサ7A,7B,7Cにより検出された振動加速度(振動波形)は、運転パラメータにより変化する閾値L及び検知時間Tを用いて、その閾値Lよりも高い振動加速度をその検知時間T内に計測した衝撃振動回数nとして判定部8で用いられる。検知時間T及び/又は閾値Lは投入物の状態に応じて閾値変更部24で変更される。
(もっと読む)
チェーン用安全装置
【課題】チェーンを利用する搬送装置において、手、腕、髪の毛などの身体の一部や衣服がチェーンに巻き込まれることを確実かつ安全に防止することができ、万が一巻き込まれた場合でも片手で安全かつ簡単に回復させることができるチェーン用安全装置を提供すること。
【解決手段】テンションローラ18に一端を連結した解除爪30を設け、解除爪30の他端側をテンションローラ18に係合している駒14に対向する位置に延出させ、停止手段の操作によってテンションローラ18とともに解除爪30を移動させ、解除爪30によってテンションローラ18に係合している駒14を押圧することを特徴とする。
(もっと読む)
ウォーキングビーム上のコイル異常検出方法およびコイル異常検出構造
【課題】ウォーキングビーム上のコイルがコイル先端部を周辺設備に引っ掛けて、転倒等を起こす前に、そのコイル異常を検出することができるウォーキングビーム上のコイル異常検出方法およびコイル異常検出構造を提供する。
【解決手段】ウォーキングビーム20により搬送されるコイル10がその先端部を周辺設備に引っ掛けたコイル異常を検出するために、コイル10の先端部が周辺設備に接触した際のコイル10の水平面内での回転挙動に追随してウォーキングビーム20が水平面内で旋回できるようにしておき、ウォーキングビーム20の水平面内での旋回動作を近接センサ25で検知することによって、当該コイル異常を検出する。
(もっと読む)
パーツフィーダー
【課題】搬送装置とパーツとの接触・剥離・摩擦等およびパーツ間の接触・剥離・摩擦等によって、搬送装置とパーツに発生した発生した静電気をほぼ完全に除去し、搬送をスムーズに行うことができるパーツフィーダーを提供する。
【解決手段】パーツフィーダーは、パーツ堆積物に振動を与えてパーツを搬送する搬送装置と、搬送装置の上方に配置され、搬送装置に載置され搬送されるパーツにイオンを供給するイオン発生装置と、イオンを少なくともパーツの外部雰囲気に露呈してない面に導くように空気を吸引するための空気流路部と、を備える。または、パーツフィーダーは、パーツ堆積物に振動を与えてパーツを搬送する搬送装置と、搬送装置の上方に配置され、搬送装置に載置され搬送されるパーツにイオンを供給するイオン発生装置と、搬送装置の上面に近接してまたは接触して配置され、パーツ堆積物の内部にイオンを導入し、外部に排出するように吸引する真空吸引アームと、を備える。
(もっと読む)
物品処理装置
【解決手段】 充填装置1はそれぞれスターホイール等の回転体を備えた供給コンベヤ2、インフィードスクリュー3、リンサ用供給スターホイール4、リンサ5、リンサ用排出スターホイール6、中間スターホイール7、フィラ用供給スターホイール8、フィラ9、フィラ・キャッパ用受け渡しスターホイール10、キャッパ11、キャッパ用排出スターホイール12、排出コンベヤ13から構成されている。
例えばフィラ9に異常が発生すると、制御手段14は第3ブレーキB3を作動させて上記フィラ9のスターホイールを強制的に停止させ、同時に、第1、第2、第4、第5サーボモータM1,M2,M4,M5を制御して、異常の発生していない設備のスターホイール等を上記フィラのスターホイールの停止時間で停止させる。
【効果】 所要の設備で異常が発生しても、各設備をほぼ同時に停止させて各設備の損傷等を防止することができる。
(もっと読む)
容器検知装置
【課題】容器の滞留を安定して検知可能な容器検知装置を提供する。
【解決手段】瓶Bの搬送経路Rに突出する突出位置Pと瓶Bの搬送経路R外に後退する後退位置Qとの間で移動可能なセンサーバー21を有する可動部2と、センサーバー21が後退位置Qにあることを検出するセンサ部3と、を備えた容器検知装置1であって、センサーバー21は、搬送方向に関して複数の容器と接触可能な長さを有し、センサーバー21の両端には、搬送経路Rから搬送経路R外に徐々に後退する両端部21bが設けられている。
(もっと読む)
閉塞検知機能付き搬送装置
【課題】搬送管が閉塞していることを検知できる閉塞検知機能付き搬送装置を提供すること。
【解決手段】斜面2の上方部から下方部へコンクリート3を搬送し、斜面2の下方部の施工現場に供給するコンクリート3の搬送装置であって、コンクリート3の搬送管12内のコンクリート3の重量が与える負荷を計測するセンサと閉塞判断手段を備えている。これにより、センサから読み取った情報と、実験値から予想される閉塞閾値を比較して、閾値を超えているか否かによって、搬送管12の閉塞を推定し、出力部18から閉塞を警告する。また、監視端末17からの指令によって、電動機駆動用制御盤15を介して運転制御を行う。
(もっと読む)
モータ駆動回路を備えた駆動モータにより駆動されるモータ内蔵ローラ、当該モータ内蔵ローラの制御装置、当該駆動モータの制御方法、当該駆動モータを備えたコンベア、及び当該コンベアの制御方法
【課題】モータ内蔵ローラ又は駆動モータの回転がロックされた際の、駆動モータの熱破損を回避することである。
【解決手段】モータ駆動回路1を備えた駆動モータ7により駆動されるモータ内蔵ローラ11であって、前記駆動モータ7又はモータ内蔵ローラ11がロックされていることを検出するロック検出手段4と、前記駆動モータ7への供給電力を制御する供給電力制御手段5とを備え、前記ロック検出手段4によって駆動モータ7又はモータ内蔵ローラ11のロックが検出されると、前記供給電力制御手段5が駆動モータ7への供給電力を低下させるようにした。
(もっと読む)
ワーク搬送装置
【課題】水平にローラコンベアを基本構成としつつ、回転駆動手段として出力が大きい物を用いる必要が無く、且つ、作業者のけがを防ぐことができる新たなワーク搬送装置を提供する。
【解決手段】ローラコンベア4と、このローラコンベア4の上流側又は下流側に配置されてなるとともに駆動手段20により回転駆動する駆動プーリ16と、該駆動プーリ16と従動プーリ17との間を走行する駆動力伝達手段と、ワークを下流側に押圧する押圧部材31と、上記押圧部材31によるワークの移動を規制するストッパ55と、を備え、上記駆動力伝達手段は、所定以上の荷重が作用することにより上記駆動プーリ16の外周面とスリップする紐状の線材30からなり、該従動プーリ17の回転状態を検出する検出手段26が配置され、この検出手段26により上記従動プーリ17が停止した場合には、上記駆動手段20を逆転する。
(もっと読む)
1 - 12 / 12
[ Back to top ]