
Fターム[3F029AA02]の内容
物品の積み重ね及び付属装置 (962) | 目的、機能 (169) | パタニングを行うもの (110) | 搬送路で姿勢を変更 (10)
Fターム[3F029AA02]に分類される特許
1 - 10 / 10
方向転換装置を備えた箱詰装置
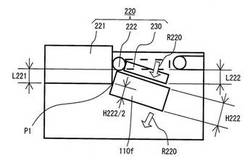
【課題】物品の搬送時における搬送姿勢を短時間でかつ確実に転回できる方向転換装置を備えた箱詰装置を提供することである。
【解決手段】本発明に係る方向転換装置220を備えた箱詰装置100は、方向転換装置220が転回装置221、回動軸222および回動板230からなる。転回装置221が包装物110f,110gに当接して、包装物110f,110gに力が付与されるとともに、回動軸222および回動板230により転回装置221による当接位置と異なる位置に力が付与される。
(もっと読む)
箱詰め装置

【課題】簡単かつ安価に製造することができるとともに、収納箱内における物品の整列状態を安定させることができる箱詰め装置を提供する。
【解決手段】箱詰め装置は、一対の第1羽根車60と、一対の第1羽根車60を互いに逆方向に回転させる第1回転手段とを有する第1羽根車装置42を備え、一対の第1羽根車60のそれぞれの第1羽根66は、複数の物品14のうちの1つを支持する第1支持部74と、他の1つを第1支持部74よりも供給方向の前方において支持する第2支持部84とを有しており、第1支持部74および第2支持部84は、回転軸L1に対して交差する方向において段差88を有するように2段に構成されており、第1羽根66が複数の物品14を支持する回転位置にあるとき、第1支持部74が第2支持部84よりも下方に位置する。
(もっと読む)
パレタイズ装置
【課題】爪を有するハンド部でワークを把持し移動させてパレット上に整列積載するパレタイズ装置において、ワークの整列時にハンド部を引き抜く動作を不要として高速にパレタイズ可能とする。
【解決手段】本装置は、ワークWを把持するハンド部2と、ハンド部2を移動させ、ワークWを順次搬送してパレット7に整列して積載するアーム部3と、を備え、ハンド部2は、ワークWを把持する長爪21および退避爪22と、退避爪22を退避させる退避機構と、を備えている。アーム部3は、爪21,22によってワークWを把持したハンド部2を移動させてワークWをパレット7上に移動させ、ハンド部2がワークWを整列させる方向x1の前方側にある退避爪22を退避機構によって退避させ、前記方向x1の後方側にある長爪21によってワークWを押してワークWを整列させる。整列時に退避爪22が退避するので、ハンド部2を引き抜く必要がない。
(もっと読む)
パレタイズ装置
【課題】パレタイズ装置において、簡単な構成により、ワークやパレットに寸法ばらつきがあっても、パレタイズ時のワーク間の干渉やパレタイズされたワーク間の隙間の発生を防止して柔軟に、且つ高速にパレタイズ可能とする。
【解決手段】本装置1は、ワークを把持するハンド部2と、ハンド部2を移動させるアーム部3と、積載したワークの位置情報を取得する計測部5と、前記情報を記憶する記憶部6と、各部の動作を制御する制御部10と、を備えている。制御部10は、ワークを把持したハンド部2を移動させてパレットにワークを積載した際に、計測部5によってそのワークの積載位置を取得して記憶部6に記憶させ、次のワークをパレットに積載する際に、記憶部6に記憶されている積載位置に基づいて、ワークの積載予定位置を決定する。既積載ワークの積載位置を基準にするので、ワークやパレットの寸法変動に対応でき干渉や隙間の発生を防止できる。
(もっと読む)
物品の方向転換装置及び方向転換方法
【課題】物品の姿勢を搬送途中で方向転換させる場合において、その方向転換させた物品の姿勢が所望の姿勢に対してずれを生じるようなときには、そのような姿勢のずれが後続の物品において生じないように自動的に修正することができる物品の方向転換装置及び方向転換方法を提供する。
【解決手段】箱Bが跨って載ることができるように並列に配置された左右両搬送コンベア28a,28bの速度を箱Bの搬送方向に対する姿勢を回転させて方向転換させ得る速度差がつくように設定し、その箱Bの搬送方向に対する姿勢を搬送経路の途中の検出位置で検出し、その検出結果に基づき、箱Bの姿勢が所望の姿勢でない場合は、検出位置で姿勢を検出された物品及びその物品に後続して搬送される物品のうち少なくとも一方の物品の姿勢が方向転換終了時点において所望の姿勢に適合するように、予め設定されている各搬送コンベア28a,28bの速度設定内容を補正する。
(もっと読む)
形鋼の幅寄せ方法および幅寄せ装置並びに段積み装置
【課題】形鋼の簡単な幅寄せを行なうことができる幅寄せ方法および幅寄せ装置を提供する。
【解決手段】装置フレーム26に枢支した3つの幅寄せ部材27,28,29の夫々は、油圧シリンダ30,31,32によって独立して傾動される。幅寄せ部材27,28,29に幅寄せ体34,36,37が配設される。幅寄せ体34,36,37に、複数の山形部35がレールの幅方向に沿って設けられる。第1幅寄せ部材27で移送コンベヤからレールを押上げることで、レールを傾動させつつ幅寄せする。第2幅寄せ部材28で第1幅寄せ部材27からレールを押上げることで、レールを幅寄せする。第3幅寄せ部材29で第2幅寄せ部材28からレールを押上げることで、レールを幅寄せする。第3幅寄せ部材29を下動することで、幅寄せしたレールは座部が上下に重なった状態で移送コンベヤの載置面に載置される。
(もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
パッケージ積付システム
【課題】従来にない新規な構成のパッケージ積付システムを提供する。
【解決手段】パッケージ積付システムSは、パッケージPを縦列に搬送する縦列搬送装置10と、積み付けにおける単層を構成する所定のパッケージ配設パターンを形成するパターン形成装置30と、それらの間に設けられ、縦列搬送装置10から搬送されたパッケージPを受け取って、パターン形成装置30に所定数のパッケージが搬送方向に直交する方向に横並び配置されるように、受け取ったパッケージPをパターン形成装置30に送り出すパッケージ送出装置20と、を備える。
(もっと読む)
物品群積付け装置
【課題】効率良く積付け作業ができる物品群積付け装置を提供する。
【解決手段】物品群積付け装置1は、物品群形成手段3から整列パターンの物品群Aを受け入れて搬送方向に搬送する昇降可能な搬送手段11を備える。物品群積付け装置1は、積付け位置と受取位置との間で水平移動可能な支持手段21を備える。支持手段21は、受取位置に位置した状態で搬送手段11の下降により物品群Aを受け取って支持する。支持手段21を積付け位置へ水平移動させることにより、物品群Aを搬送手段11の搬送方向と同一の方向に搬送する。支持手段21が受取位置に復帰すると、物品群Aが物品群四面外周ガイド手段40に沿って落下する。
(もっと読む)
自動荷積装置、及び偏荷重防止プログラム
【課題】 パレットに積載された複数の物品の荷重が略釣り合うように、複数の物品の
配置を設定できる自動荷積装置、及び偏荷重防止プログラムを提供する。
【解決手段】 自動荷積装置1は、物品2が各々積載される複数の荷積エリアaが中心mの周りに割付けされるパレットpと、複数の荷積エリアaを特定するための管理コードを記録する管理番号記憶装置3と、複数の荷積エリアaを後述の要領で順位付けして記録するサブ管理番号記憶装置4と、複数の荷積エリアaに物品2を搬入出する荷役装置5と、荷役装置5を制御する情報処理装置6と、複数の荷積エリアaの中から選択される荷積エリアaの管理コードが入力される入力装置7とを備える。
(もっと読む)
1 - 10 / 10
[ Back to top ]