
Fターム[3G093FA08]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御部の特徴 (6,324) | 演算部内での処理 (5,972) | 帰還制御 (2,284) | 目標値の上限値、下限値の設定 (288)
Fターム[3G093FA08]に分類される特許
1 - 20 / 288
エンジン駆動型インバータ発電機の制御方法,及びエンジン駆動型インバータ発電機
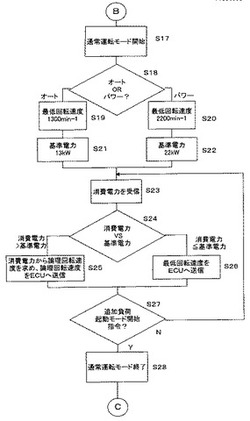
【課題】軽負荷から重負荷まで対応でき,低燃費であるエンジン駆動型インバータ発電機を提供する。
【解決手段】入力手段7の入力と検知された負荷の状況に基づきエンジン21の回転速度を制御するコントローラ8を設け,負荷の起動後,負荷の状況に応じて入力手段7で設定した最低回転速度を下限としてエンジンの回転速度を制御する通常運転モードをコントローラ8に実行させる。通常運転モード時,コントローラ8は,検知された負荷の状況(例えば消費電力)からエンジンの論理回転速度を求め,前記消費電力と,最低回転速度に対応する,基準となる負荷の例えば消費電力(基準電力)を比較し,消費電力が基準電力よりも大きい場合,論理回転速度を目標回転速度とし,消費電力が基準電力以下の場合,最低回転速度を目標回転速度とし,目標回転速度とエンジンの実測回転速度が一致するよう制御する。
(もっと読む)
ハイブリッド車両の駆動制御装置

【課題】 エンジン回転数と車速との関係により設定される仮想的な変速段の走行状態において、電力収支の破綻を回避させることを目的とする。
【解決手段】 エンジンとモータ・ジェネレータと蓄電装置とを備え、エンジンの回転数に制限回転数Nemax,Neminを設定することで、車速に対するエンジンの回転数の比率が一定になるようにエンジンの回転数を制御することができるハイブリッド車両の駆動制御装置において、車両の駆動要求量Preqを満たすべく蓄電装置が放電する際に、その蓄電装置の電力量Woutが所定の閾値Woutthより小さい場合、エンジンの制限回転数Nemax,Neminを高回転数側に変更させる制限回転数変更手段を備える。
(もっと読む)
エンジン駆動型インバータ発電機の制御方法,及びエンジン駆動型インバータ発電機
【課題】1台で軽負荷から重負荷まで広範に対応することができ,しかも低燃費であるエンジン駆動型インバータ発電機を提供する。
【解決手段】発電機1の各種設定及び動作指示を入力するための入力手段7と,負荷側の変化を検出する手段,前記入力手段7による入力と検知した負荷の状況に基づきエンジン21の回転速度を制御するコントローラ8を設ける。前記入力手段7には,エンジンの回転速度を所定の追加負荷回転速度に上昇させる追加負荷起動モード開始指令入力手段73を設け,前記コントローラ8が前記追加負荷起動モード開始指令入力手段73からの移行指令を受信すると,前記エンジン21の回転速度を所定の追加負荷起動回転速度に上昇させる追加負荷起動モードへ移行し,追加負荷の起動を検知した後,前記通常運転モードに移行するように構成した。
(もっと読む)
エンジン駆動型インバータ発電機の制御方法,及びエンジン駆動型インバータ発電機
【課題】1台で軽負荷から重負荷まで広範に対応することができ,しかも低燃費であるエンジン駆動型インバータ発電機を提供する。
【解決手段】発電機1の各種設定及び動作指示を入力するための入力手段7と,負荷側の変化を検出する手段,前記入力手段7による入力と検知した負荷の状況に基づきエンジン21の回転速度を制御するコントローラ8を設ける。前記入力手段7には,該発電機1に接続する負荷の大きさを設定する接続負荷設定手段74を設け,前記コントローラ8がエンジン21の始動後,前記接続負荷設定手段74で設定した負荷の大きさに応じた負荷起動回転速度以上に前記エンジン21の回転速度を制御して負荷の起動に備える負荷起動モードを実行するように構成した。これにより,負荷の起動時,接続する負荷の大きさに応じた回転速度でエンジンを駆動する。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】 エンジン回転数と車速との関係により設定される擬似的な変速段の走行状態において、電力収支の破綻を回避させることを目的とする。
【解決手段】 エンジンとモータ・ジェネレータと蓄電装置とを備え、エンジンの回転数に制限回転数Nemax,Neminを設定することで車速に対するエンジン回転数の比率が一定になるようにエンジン回転数を制御することができるハイブリッド車両の駆動制御装置において、蓄電装置の出力可能な電力量Woutが減少する状態に応じてエンジンに係る回転数上限値Nemaxを高回転数側に変更させる制限回転数変更手段を備える。
(もっと読む)
車両用走行支援装置
【課題】 交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供する。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
(もっと読む)
ハイブリッド車両及びその制御方法
【課題】ハイブリッド車両(HV)において、例えば、燃料の消費や騒音が大きくなる等の問題を最小限に抑えつつ、暖房要求が生じた際に、EVモードにおいても十分な暖房性能を確保する。
【解決手段】暖房装置を備えるハイブリッド車両(HV)において、例えば、乗員室(キャビン)の暖房や内燃機関の暖機等の要求(暖房要求)が生じた際に、暖房に利用することができる内燃機関からの廃熱(余熱を含む)が不十分である場合に、内燃機関の下限回転数の目標値を、当該車両の走行モードがEVモードであるかHVモードあるかに応じて切り替える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、変速機故障時の燃費悪化を防止する。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)と、内燃機関の回転数を変速して車輪(FL,FR)に伝達する有段変速機(30)と、蓄電手段(12)を有する回転電機(MG)とを備えるハイブリッド車両(1)を制御する。ハイブリッド車両の制御装置は、有段変速機の故障を検出する変速機故障検出手段(110)と、有段変速機の故障が検出された場合に、回転電機の充放電パワーが所定の上限値又は下限値を超えないように内燃機関のトルクを制限する制限手段(120,130)と、有段変速機の故障が検出された場合に、蓄電手段の充電制限範囲を、変速機の故障が検出されていない場合と比べて大きくする充電制限範囲変更手段(150,160)とを備える。
(もっと読む)
車両の制御装置
【課題】エンジンの自動停止機能を長期間に亘って保持する。
【解決手段】車両の制御装置(ECU7)は、スタータモータ5の累積作動回数Nをカウントするカウント部71と、累積作動回数Nが予め設定された閾値回数N1(例えば、10万回)に到達したか否かを判定する回数判定部72と、累積作動回数Nが閾値回数N1に到達したと判定された場合に、「エンジン停止条件」を、初期の条件である第1停止条件から、エンジン1がより停止し難い条件である第2停止条件に変更する停止条件変更部74と、を備える
(もっと読む)
作業機のエンジン回転速度制御装置
【課題】エンジンの回転速度を設定回転速度に維持するエンジン回転速度制御装置において、高負荷時におけるエンジンの出力を抑えて作業機の破損を防止する。
【解決手段】作業負荷に拘わらずにエンジンの回転速度を設定回転速度に維持する作業機のエンジン回転速度制御装置であって、作業負荷によってエンジンの回転速度が低下した場合に、当該エンジンの回転速度を設定回転速度に復帰させるべく増速出力を行ない、この増速出力の後、所定時間経過してもエンジンの回転速度が設定回転速度に復帰しない場合には、設定回転速度を所定量だけ減算処理して再設定する構成とする。また、再設定前の設定回転速度と現時点でのエンジン回転速度との差に応じて、再設定のための減算量を決定する構成とする。
(もっと読む)
エンジントルク制御装置
【課題】低地ストール発進と同等のエンジントルクを空気密度の低い高地ストール発進においても得られるようにする。
【解決手段】高地ストール発進条件を判定し(S2)、高地ストール発進と判定された場合、高地ストール発進時目標エンジン回転数STLEGをトルクコンバータ2のストールトルク比と自動変速機3内の油温とに基づいて設定し(S6)、目標エンジン回転数STLEGとエンジン回転数Neとの差分に応じたプレエンジントルク上限加算値TRQNEUPを設定し(S7,S9〜S12)、高地ストール発進時目標エンジン回転数STLEGに基づいてプレエンジントルク上限値PRETRQLIMを設定し(S13)、この上限値PRETRQLIMにプレエンジントルク上限加算値TRQNEUPを加算して、エンジントルク上限値TRQLIMを設定し(S15,S18)、このエンジントルク上限値TRQLIMを目標エンジントルクとしてエンジン1を制御する。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】シーケンシャルモードによって設定される下限エンジン回転数によるエンジン回転数の制御を実現しつつ、システム電圧を制限することのできるハイブリッド車両の制御装置を提供する。
【解決手段】本発明にかかるハイブリッド車両の制御装置であるパワーマネジメントコントロールコンピュータ500は、電圧制限モードによりシステム電圧を制限する際に、シーケンシャルモードにより下限エンジン回転数を設定しているときには、動力分割機構130を通じて分配されるトルクを第1のモータジェネレータ120における回生制動によって相殺するために必要なシステム電圧を算出し、算出されたシステム電圧を下回らないようにシステム電圧を制限する。
(もっと読む)
ハイブリッド車両の押し当て制御装置
【課題】バッテリーの出力制限に拘らず押し当てトルクを適切に付与できるようにする。
【解決手段】第2モータジェネレータMG2に電力供給するバッテリー54の出力の上限値がバッテリー出力制限手段78によって制限された場合でも、押し当て保証トルク設定手段76およびMAX選択手段80によって押し当て保証トルクstmgが選択されることにより、制限された上限値を越えてバッテリー54から第2電動モータジェネレータMG2に電力が供給されることが許容され、押し当てトルクotmgで第2モータジェネレータMG2が作動させられる。これにより、バッテリー54の出力制限に拘らず押し当てトルクotmgが適切に付与されるようになり、押し当てトルクの低下で歯打ち音が発生したり押し当てトルクのハンチングで車両振動が発生したりすることが防止される。
(もっと読む)
ホイールローダの走行システム
【課題】ホイールローダの走行システムにおいて、作業時の作業効率や走行始動時の加速性能を低下させずに最高走行速度を制限することができ、かつ最高走行速度の制限時のエンジン出力馬力のロスを抑え、燃費の向上を図る。
【解決手段】4速変速制御処理時、第1及び第2油圧モータ23,24の容量を連携して制御するとともに、第2油圧モータ24の最小傾転量を制限傾転量q2cmiに制限する。また、第1油圧モータ23の傾転量が最小傾転量q1minに達するとエンジン10の最高回転数を第1制限回転数Ncmax1(例えば1800rpm)に制限する。
(もっと読む)
動力伝達装置
【課題】エンジンの始動後、その回転速度をワンウェイベアリングの出力側回転速度(伝達側回転速度Ni)に制御しようとする場合に、ワンウェイベアリングが急激に締結されることによる、動力伝達機構のショック、及びユーザに体感されうる振動の発生を抑える。
【解決手段】エンジン12の始動後、エンジン12の回転速度を、エンジン12に対する要求動力に応じて定まる目標回転速度にフィードバック制御する。これとともに、CVT22のギア比を操作することで、ワンウェイベアリング28の出力側の回転速度を目標回転速度にフィードバック制御する。
(もっと読む)
車両の制御装置
【課題】エンジンと、EHCと、発電することによってクランキングトルクを発生可能な回転電機とを備えた車両において、エンジン始動時の性能悪化を抑制する。
【解決手段】エンジンと、EHCと、発電することによってエンジンのクランキングトルクを発生可能な第1MGと、バッテリとを備えた車両において、ECU200は、EV走行中にエンジン始動要求があると、車速Vに応じた電力を第1MGに発電させてクランキングトルクを発生させる(210、220)。ECU200は、バッテリの温度が所定温度以上である高温時には、バッテリの受入可能電力値Winを基準値W1よりも低い制限値W0に低下させる(230)。ECU200は、EV走行中にエンジン始動要求があった場合、受入可能電力値Winが制限値W0に低下しており、かつ、車速Vがしきい車速V0以上であるときは、EHC通電を行なう(240)。
(もっと読む)
作業機械のエンジン制御装置およびそのエンジン制御方法
【課題】低燃費と作業性の向上とを両立すること。
【解決手段】作業機械の運転状態を検出する検出手段と、前記運転状態をもとに、作業機械の負荷が抜けた場合に最大限上げられるエンジンの回転数である無負荷最大回転数np2を演算する無負荷最大回転数演算手段と、前記運転状態をもとに、作業機械に負荷が加わった場合に上げられるエンジンの回転数である目標マッチング回転数np1を前記無負荷最大回転数とは別に演算する目標マッチング回転数演算手段と、前記運転状態をもとに、最大限出力することができるエンジン目標出力ELを演算するエンジン目標出力演算手段と、エンジン目標出力ELの制限下で、無負荷最大回転数np2と目標マッチング回転数np1との間でエンジン回転数を制御するエンジン制御手段と、を備える。
(もっと読む)
可変圧縮比機構を備える内燃機関
【課題】可変圧縮比機構を備える内燃機関であって、可変圧縮比機構により制御される機械圧縮比に対して可変バルブタイミング機構により制御される吸気弁の閉弁時期が設定されている場合に、現在の機械圧縮比を検出することができなくなって吸気弁の設定閉弁時期への制御が不可能となっても、ノッキングやプレイグニッションの発生を抑制可能とする。
【解決手段】現在の機械圧縮比を検出することができなくなったときには(t1)、可変圧縮比機構を機械圧縮比(E)が下限値(EL)となるまで作動すると共に可変バルブタイミング機構により吸気弁の閉弁時期(IVC)を機械圧縮比の上限値に対して設定された閉弁時期(IVC1)へ向けて遅角する。
(もっと読む)
エンジンシステム
【課題】運転の安定性を向上し得るエンジンシステムを提供する。
【解決手段】制御手段20が、触媒温度検出手段14の検出温度が過熱防止用設定温度以上になって触媒過熱状態であると判断すると、エンジン1の出力を低下させる又はエンジン1を停止するように構成されたエンジンシステムであって、制御手段20がエンジン1の燃焼モードをストイキ燃焼モードからリーン燃焼モードに切り換えるときは、少なくともその切り換えタイミングになった以降から開始されて、燃焼モードがリーン燃焼モードに切り換えられた後にまで延びるように設定される牽制用設定時間が経過する間、制御手段20が触媒過熱状態であると判断するのを阻止する過熱判断阻止手段21が設けられている。
(もっと読む)
1 - 20 / 288
[ Back to top ]