
Fターム[3J027FB03]の内容
Fターム[3J027FB03]に分類される特許
1 - 20 / 50
動力伝達装置
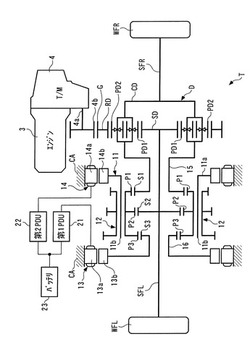
【課題】損失を抑制できるとともに、装置の小型化および搭載性の向上を図ることができる動力伝達装置を提供する。
【解決手段】動力伝達装置Tでは、互いに一体の第1〜第3ピニオンギヤP1〜P3で構成された3連ピニオンギヤ12が、キャリア部材11に回転自在に支持されている。また、第2および第1ピニオンギヤP2、P1が、左右の出力軸SFLおよびSFRにそれぞれ連結されるとともに、第3ピニオンギヤP3およびキャリア部材11が、回転エネルギを回収可能な第1および第2回収装置13、14にそれぞれ連結されている。さらに、第1回収装置13で回転エネルギを回収することにより、キャリア部材11を左出力軸SFLに対して増速させるとともに、第2回収装置14で回転エネルギを回収することにより、キャリア部材11を左出力軸SFLに対して減速させる。
(もっと読む)
車両旋回挙動制御装置

【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
車両統合制御装置
【課題】左右輪差動制限機構の作動に伴う操舵トルク変化を精度よく抑制し、運転者のステアリング操作時の違和感を解消し、走破性と安定性とを両立させる。
【解決手段】電子制御式の左右輪差動制限機構81の拘束トルク制御量に比例して拘束トルク比例制御手段201が操舵力制御機構へ出力させる付加トルクと、操舵反力フィードバック制御手段204が操舵力制御機構へ出力させる、演算した操舵系反力を打ち消す方向の付加トルクとの割合を、前記左右前輪の回転速度差に応じて切り替える第1の前輪左右速差補正係数規定手段202、第2の前輪左右速差補正係数規定手段205、第1の乗算処理手段203、第2の乗算処理手段206および加算手段207とを備える。
(もっと読む)
車両用駆動装置
【課題】減速用遊星歯車装置のサンギヤの振れに起因する騒音や振動の発生を抑制することができる車両用駆動装置を提供する。
【解決手段】減速用遊星歯車装置24の第2サンギヤS2は、第2ロータシャフト70のサンギヤ嵌合部70bに嵌合され、減速用遊星歯車装置24の第2キャリヤCA2は、軸中心線C方向の第2モータジェネレータMG2側の一端部すなわち第1キャリヤ部材78がトランスアクスルケース16の壁部16aにより支持され、他端部すなわち第2キャリヤ部材80が第2ロータシャフト70により第7ラジアル玉軸受74を介して支持されている。よって、第2サンギヤS2の振れに起因してその第2サンギヤS2と複数の第2ピニオンP2との歯当たりが悪化して騒音や振動が発生することを抑制することができる。
(もっと読む)
デファレンシャル装置
【課題】雪道等においてスタックする等してデフケースとドライブシャフトとの差回転が過剰に大きくなる場合であっても、ドライブシャフトとデフケースとの摺動部分等において焼き付きが生じないデファレンシャル装置の提供を目的とした。
【解決手段】デフケース36は、差動歯車機構を収容する収容空間36xと、ドライブシャフトを挿入するためのシャフト挿入部36y,36zとを有する。シャフト挿入部36y,36zの内周面には、油溝36p,36q及び油溝36r,36sが設けられている。油溝36p,36q及び油溝36r,36sは、シャフト挿入部36y,36zの軸線方向に対して交差するように延び、それぞれ軸対称となるように形成されている。
(もっと読む)
差動制限機構の制御装置
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
車両用動力伝達装置用制御装置
【課題】差動機構を高回転化から保護しつつエンジントルク低下を補うことが可能な車両用動力伝達装置用制御装置を提供する。
【解決手段】許容回転速度設定手段96は、所定の加速操作量OPAC及びエンジン回転速度Neのときにエンジン14から出力されるエンジントルクTeが、エンジン14の出力トルク特性を示す予め設定された関係から上記所定の加速操作量OPAC及びエンジン回転速度Neに基づいて定まる基準エンジントルクTesよりも低いと判断された場合には、そうでない場合と比較して、差動機構である第1遊星歯車装置20の許容入力回転速度N1inを高く設定する。従って、許容入力回転速度N1inの制限によって第1遊星歯車装置20を高回転化から保護することが可能であると共に、許容入力回転速度N1inの変更に応じてエンジン回転速度Neを引き上げてエンジントルクTeを上昇させエンジントルク低下を補うことが可能となる。
(もっと読む)
駆動制御装置
【課題】 車両の走行状態に応じて適切に旋回することができる駆動制御装置を提供すること。
【解決手段】 第1規範ヨーレイト算出手段8a4によって、横加速度センサ32で検出された加速度に応じて第1規範ヨーレイトが算出され、第2規範ヨーレイト算出手段8a5によって、横加速度推定手段8a3で推定した加速度に応じて第2規範ヨーレイトが算出される。横加速度推定手段8a3は、操舵角と走行速度に基づいて加速度を推定する。走行速度と操舵角とに応じて規範ヨーレイト選択手段8a6によって選択された規範ヨーレイトと走行速度とに基づいて、基準差回転算出手段8a7によって基準差回転が算出される。制御手段8a1によって、実差回転と基準差回転との偏差に応じて差回転設定機構Tを制御する。
(もっと読む)
車両用最終減速装置
【課題】車軸位置をエンジン側へ寄せて配置可能でありかつ構成が簡素な車両用最終減速装置を提供する。
【解決手段】車両用最終減速装置100を、エンジンと変速機構部50との間に設けられる発進デバイス20の回転軸と平行に設けられ変速機構部の出力が入力されるドライブシャフト110と、ドライブシャフトの出力回転を方向転換する第1の動力伝達手段112、122と、第1の動力伝達手段によって車幅方向にほぼ沿った軸回りに回転駆動される中間シャフト120と、中間シャフトと平行な軸回りに回転可能に支持され左右車輪に駆動力を伝達するとともに、少なくとも一部の車両前後方向における位置が発進デバイスと重なって配置されたディファレンシャル130と、中間シャフトからディファレンシャルへ駆動力を伝達する第2の動力伝達手段123,131とを備える構成とする。
(もっと読む)
油圧クラッチの作動装置
【課題】定格出力の小さな小型の電動モータで駆動する油圧ポンプを備えることができる油圧クラッチの作動装置を提供することを課題とする。
【解決手段】摩擦係合部に発生するクラッチ吸収エネルギE、油圧ポンプの吐出油量である必要吐出量QPおよび電動モータに供給する電源電圧VMを算出する(ステップS1〜S3)。そして、電源電圧供給装置の出力電圧Voutが、算出した電源電圧VMより低いとき(ステップS4→Yes)、電源電圧VMが出力上限電圧VMAX以下であれば(ステップS5→No)、出力電圧Voutを電源電圧VMまで昇圧する(ステップS10)。
一方、電源電圧VMが出力上限電圧VMAXより高いとき(ステップS5→Yes)、出力電圧Voutを出力上限電圧VMAXまで昇圧し、そのときの最大潤滑流量QMAXに基づいて設定する目標伝達トルクTOBJを油圧クラッチに発生させる(ステップS6〜S9)。
(もっと読む)
動力伝達装置
【課題】小型化を図ることができる動力伝達装置を提供する。
【解決手段】動力伝達装置は、入力要素1及び2つの出力要素21,22を有する差動機構Dと、電動機6と2つのプラネタリギヤ機構PG1,PG2を有する配分比制御機構Tとを備える。配分比制御機構Tに設けられた電動機用従動ギヤ62には、配分比制御用ピニオンPbを自転及び公転自在に軸支する配分比制御用キャリアCbが連結される。配分比制御用ピニオンPbには、差動機構Dの入力要素1及び出力要素22の回転が第1動力伝達経路Rb及び第2動力伝達経路5R−PG1−Sbを介して夫々伝達される。配分比制御用ピニオンPbは、両駆動輪WFL,WFRの回転速度が同一である場合には、配分比制御用キャリアCbを軸に自転するように前記2つの動力伝達経路が構成されている。
(もっと読む)
デファレンシャル装置の潤滑構造
【課題】別部品を必要とせず、軸受や差動ギヤを効率よく潤滑できるデファレンシャル装置の潤滑構造を得る。
【解決手段】デフリングギヤ31の一方側と対向するハウジング5cに、デフリングギヤの側面と近接する第1内壁部50と、デフリングギヤの外周面と近接し、デフリングギヤでかき上げられたオイルを内壁面に沿って上昇可能とする第2内壁部51とを形成し、第1内壁部であってデフリングギヤの回転中心より上部に軸方向に凹んだオイル溜まり部52を形成し、オイル溜まり部の直上部に、デフリングギヤでかき上げられ第2内壁部に沿って流れるオイルの流れを変更してオイル溜まり部へ落下させるガイドリブ55を形成する。軸受36の外周部を保持しているハウジングの軸受保持部53に、オイルを軸受の外側面へ供給するためのオイル導入溝57を形成し、オイル溜まり部の下面にオイル導入溝に向かって下方へ傾斜する傾斜面52bを形成した。
(もっと読む)
ハイブリッド車両用の自動変速機
【課題】ハイブリッド車両用自動変速機の、運転者の操作に対する追従性を向上させ、燃費を向上させる。
【解決手段】自動変速機1は、駆動ギヤG3a,G5aを軸支する第1駆動ギヤ軸4と入力軸2とを連結自在な第1クラッチC1と、駆動ギヤG2a,G4aを軸支する第2駆動ギヤ軸5と入力軸2とを連結自在な第2クラッチC2と、駆動ギヤG3a,G5aを第1駆動ギヤ軸4に連結自在な第1噛合機構SM1と、駆動ギヤG2a,G4aを第2駆動ギヤ軸5に連結自在な第2噛合機構SM2と、プラネタリギヤ機構PGの第3要素Raを変速機ケース7に固定自在なブレーキB1と、電動機MGを第1要素Saに連結する状態または電動機MGを第3要素Raに連結する状態に切換自在な切換機構8とを備える。第1要素Saと第1駆動ギヤ軸4とが連結され、第2要素Caと駆動ギヤG3aとが連結されている。
(もっと読む)
差動制限機構付き差動装置
【課題】 差動制限機構付き差動装置の摩擦多板クラッチを作動させる電動モータの初期停止位置を、温度変化の影響を排除して適切に設定する。
【解決手段】 差動機構に差動制限機能を発揮させる摩擦多板クラッチを作動させる電動モータの初期停止位置(ゼロ点)を設定する際に、その初期停止位置に対応する目標モータ回転角をアクチュエータの油温T3と、内燃機関の油温T2と、内燃機関の水温T1とから算出した温度依存項に基づいて変化させるので、温度変化に伴う部品の伸縮により摩擦多板クラッチのクリアランスが変動しても、その変動を補償して電動モータの適正な初期停止位置(ゼロ点)を設定することができる。これにより、摩擦多板クラッチのクリアランスの増加による係合応答性の低下や、クリアランスの減少による引きずりを防止することができる。
(もっと読む)
終減速装置
【課題】二段階の終減速を行う終減速装置の小型化を図る。
【解決手段】ドライブ・ピニオン・シャフト9からの駆動力を減速して出力する第1の減速ギヤ組11と、第1の減速ギヤ組11から出力された駆動力を受ける中間軸13と、中間軸13に同心上に配置連動構成されて中間軸13からの駆動力を分配出力する差動ギヤ組15と、差動ギヤ組15から分配出力された駆動力を一対の後輪車軸21,23に減速して出力する一対の第2の減速ギヤ組17,19とを備えことを特徴とする。
(もっと読む)
左右駆動力配分装置
【課題】 旋回アシスト方向と復元アシスト方向とで装置効率に差があっても適切な左右駆動力配分を実現できる左右駆動力配分装置を提供する。
【解決手段】 補正ゲイン設定処理を開始すると、ATTS−ECU16は、ステップS21で左右前輪4fl,4frの車輪速Wfl,Wfrから自動車1の旋回方向Td(左,右)を判定した後、ステップS22で駆動力配分ベース値Dbからアシスト方向Ad(左,右)を判定する。次に、ATTS−ECU16は、ステップS23で旋回方向Tdとアシスト方向Adとが一致しているか否かを判定し、この判定がYesであれば補正ゲインGcを1に設定し、Noであれば補正ゲインGcを所定の低減値Grに設定する。低減値Grは、ATTS13の旋回アシスト方向における装置効率を復元アシスト方向における装置効率で除した値であり、例えば「0.75」程度に設定されている。
(もっと読む)
車両挙動制御装置
【課題】 スラローム走行時等における円滑な制御を実現した車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS24でベース係数Kbに遅延フィルタ処理を行ってフィルタ係数Kfを算出/設定した後、ステップS25でベース係数Kbとフィルタ係数Kfとを和すことで係数合算値Ksを求める。次に、ATTS−ECU16は、ステップS26で係数合算値Ksが判定閾値Kthより大きいか否かを判定し、この判定がYesであればステップS27で不感帯係数Knを1とする。これにより、駆動力配分制御において制御指示ベース値Dbがそのまま目標駆動力配分制御値Dtgtとなる。なお、判定閾値Kthは、十分に小さな値に設定されている。
(もっと読む)
車両用差動装置
【課題】ドライブモード及びコーストモードのいずれかのモードに限定したバイアス比の調整を行うことができる車両用差動装置を提供する。
【解決手段】遊星歯車2B,2B,…を自転可能に支持する回転部材からなるプラネタリキャリア2Aは、1対の出力軸の回転軸線O上で相対回転不能な円筒体20A,21Aによって分割形成され、車両の駆動源の駆動力を受けて1対の出力軸の回転軸線O方向にスラスト力を発生させるスラスト力発生部、及び車両のドライブモードにおいて円筒体20A,21Aの軸方向に沿うスラスト力による相対移動を規制する相対移動規制部を有する。
(もっと読む)
車両挙動制御装置
【課題】 挙動制御アクチュエータの作動量を検出するセンサが故障した場合においても、望ましくない車両挙動を発生させ難くした車両挙動制御装置を提供する。
【解決手段】 油圧センサ26が故障することで実際には存在しない油圧差ΔPが継続して算出された場合、フィードバック積分項Iiが徐々に増大して遂には上限値Ilimを超え、ステップS26の判定がYesになる。すると、ATTS−ECU16は、ステップS29でフィードバック積分項Iiを上限値Ilimとした後、ステップS27,S28に移行して駆動電流フィードバック項Ifbや目標駆動電流Itgtの算出を行う。これにより、駆動電流フィードバック項Ifb(すなわち、目標駆動電流Itgt)の無制限な増大が防止され、ATTS13の不適切な作動に起因する望ましくない車両挙動が抑制される。
(もっと読む)
車両挙動制御装置
【課題】 アクチュエータの作動遅れを補償するとともに、走行状態に適した応答性を実現できる車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS23で車速Vに所定の車速係数Kvを乗じて車速補正値Fcvを算出した後、ステップS24で路面μに所定のμ係数Kμを乗じてμ補正値Fcμを算出する。次に、ATTS−ECU16は、ステップS25で、フィルタ周波数ベース値Fbに対して車速補正値Fcvを減じるとともにμ補正値Fcμを加えることにより、可変ローパスフィルタ63のフィルタ周波数Ffを設定する。これにより、フィルタ周波数Ffは、車速Vが高くなるほど低くなり、路面μが高くなるほど高くなる。
(もっと読む)
1 - 20 / 50
[ Back to top ]