
Fターム[3J027HK32]の内容
Fターム[3J027HK32]に分類される特許
1 - 20 / 135
車両旋回挙動制御装置
【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
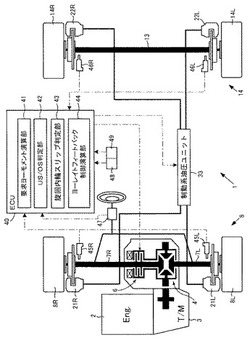
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
電動パワーステアリング装置

【課題】
電動パワーステアリング装置に異常が発生して操舵補助が停止された場合に、ディファレンシャルギアをアクティブ制御することによって、運転者の操舵感に違和感を与えることなく代替操舵補助を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】
電動パワーステアリング装置の異常を検出する異常検出部と、左右の車輪の回転数差を調整するためのディファレンシャルギアとを設け、異常検出部が電動パワーステアリング装置の異常を検出したときに、ディファレンシャルギアが車両状態に基づいて代替操舵補助を行う。
(もっと読む)
駆動力配分機構の制御装置
【課題】入力された駆動力を二軸に配分して伝達する駆動力配分機構の耐久性を向上させる。
【解決手段】入力されたトルクを互いに独立して回転できる二軸に分配するとともに、一方の軸から他方の軸にトルクを移動させるように構成された駆動力配分機構の制御装置において、前記駆動力配分機構に入力されるトルクを求める入力トルク算出手段(ステップS1)と、その入力トルク算出手段(ステップS1)で求められた入力トルクに基づいて、前記二軸間で移動させる移動トルクの上限値を求めるとともに、前記二軸間で移動させるトルクをその上限値以下に規制する移動トルク制限手段(ステップS3)とを備えている。
(もっと読む)
車両用駆動装置
【課題】制御を簡易化でき、ヨーモーメントを発生させることのできる車両用駆動装置を提供する。
【解決手段】後輪駆動装置1は、左後輪LWrを駆動する電動機2Aと、電動機2Aと左後輪LWrとの動力伝達経路上に設けられた遊星歯車式減速機12Aと、を有する左車輪駆動装置と、右後輪RWrを駆動する電動機2Bと、電動機2Bと右後輪RWrとの動力伝達経路上に設けられた遊星歯車式減速機12Bと、を有する右車輪駆動装置と、電動機2A、2Bを制御する制御装置8と、を備える。遊星歯車式減速機12A、12Bのサンギヤ21A、21Bにそれぞれ電動機2A、2Bが接続され、プラネタリキャリア23A、23Bにそれぞれ左後輪LWr及び右後輪RWrが接続され、リングギヤ24A、24B同士が互いに連結される。制御装置8は、リングギヤ24A、24Bの回転を目標回転に制御する回転制御を行なうとき、電動機2A、2Bのいずれか一方のみを駆動制御してリングギヤ24A、24Bの回転を制御する。
(もっと読む)
車両用駆動操舵アクチュエータ
【課題】1つの電動モータにより駆動力と操舵力を自在に制御することができ、しかも、電力消費が少ない車両用駆動操舵アクチュエータを提供する。
【解決手段】車輪駆動ユニット200は、電動モータ11の回転を減速して車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて作動され、電動モータの回転を増減速する無段変速機15と、電動モータの回転動力が直接入力される第1入力部、電動モータの回転動力が無段変速機を介して入力される第2入力部および操舵ユニットを操舵する操舵部材に連結された出力部を有する第2の遊星ギヤ機構17とを備えている。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
差動制限機構の制御装置
【課題】要求されるLSD(差動制限機構)の作動と、LSDの作動により生じる操舵反力変化に起因して発生する操舵違和感の抑制とをバランスさせることができるようにした、差動制限機構の制御装置を提供する。
【解決手段】車両の左右輪の差動を制限する差動制限機構5と、差動制限機構5を制御する制御手段10とを有する車両において、車両の操舵角を検出する操舵角検出手段8aと、車両の操舵トルクを検出する操舵トルク検出手段9と、を有し、制御手段10は、操舵角検出手段8aにより検出した操舵角の方向と、操舵トルク検出手段9により検出した操舵トルクの方向とが異なった際に、差動制限機構5の制御量を減少させる。
(もっと読む)
差動制限機構の制御装置
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
駆動制御装置
【課題】 車両の走行状態に応じて適切に旋回することができる駆動制御装置を提供すること。
【解決手段】 第1規範ヨーレイト算出手段8a4によって、横加速度センサ32で検出された加速度に応じて第1規範ヨーレイトが算出され、第2規範ヨーレイト算出手段8a5によって、横加速度推定手段8a3で推定した加速度に応じて第2規範ヨーレイトが算出される。横加速度推定手段8a3は、操舵角と走行速度に基づいて加速度を推定する。走行速度と操舵角とに応じて規範ヨーレイト選択手段8a6によって選択された規範ヨーレイトと走行速度とに基づいて、基準差回転算出手段8a7によって基準差回転が算出される。制御手段8a1によって、実差回転と基準差回転との偏差に応じて差回転設定機構Tを制御する。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
出力低減制御装置
【課題】左右駆動輪間のデファレンシャル装置が差動制限下にあるとき、左右スプリットμ路発進時等でも車両の直進性を維持可能とする。
【解決手段】自動車の左右駆動輪間に介設され左右駆動輪間の差動許容及び差動制限の切り替えが可能なデファレンシャル装置C1と、アクセル開度に応じてエンジンC3の出力を制御しこの出力の立ち上がり度合いを運転者の指示又は自動車の走行環境に応じて緩く切り替えるエンジン出力制御部C5と、リヤ・デファレンシャル装置1がデフ・ロック状態にあって車速が設定車速を下回りエンジン13の出力の立ち上がり度合いが緩くなるように切り替えられているときエンジン13の出力の立ち上がり限界を設定値内とするようにエンジンECU77へ指令して車輪駆動力を抑制するデフ・ロックECU51とを備えたことを特徴とする。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 オーバーステア状態を解消すべく旋回内輪に配分する駆動力を増加させたときに、逆にオーバーステア状態が助長されるの事態を防止する。
【解決手段】 旋回方向判定手段が車両の旋回方向を判定すると(ステップS32)、旋回内輪スリップ率算出手段が旋回内輪のスリップ率Rslを算出し(ステップS33)、そのスリップ率Rslが閾値を超えると、駆動力配分量保持手段(ステップS35)が駆動力配分装置の駆動力配分量を前記スリップ率Rslが閾値Rrefを超えたときの値に保持する。これにより、旋回中に生じたオーバーステア状態を解消すべく旋回内輪に配分する駆動力を増加させても、旋回内輪に作用する荷重がタイヤの摩擦円を超えるのを未然に防止することで、旋回内輪がスリップしてグリップが失われのを回避し、オーバーステア状態が助長されないようにして車両挙動の安定化を図ることができる。
(もっと読む)
駆動力配分装置の制御装置
【課題】 一方のクラッチの係合に伴って他方のクラッチに過剰なクラッチトルクがかからないようにしながら左右輪に駆動力を適切に配分する。
【解決手段】 車両の走行状態に基づいて算出された2つの油圧クラッチの係合力に従って、前記2つの油圧クラッチにおいてそれぞれのクラッチピストンを動作させるための油圧指令値を取得する。取得した油圧指令値の油圧差に基づいて、2つの油圧クラッチのうちいずれか一方について予め算出した係合力を補正し、該補正した係合力に応じて前記いずれか一方の油圧クラッチのクラッチピストンを動作させる。2つの油圧クラッチが同時に作動されると、一方から他方へと伝達される余剰推力を含む係合力に応じた油圧が計測され得、その油圧差に応じて係合力を適宜に補正することで余剰推力の影響を排除して、過剰なクラッチトルクがかからないようにしながら左右輪に駆動力を適切に配分することができるようになる。
(もっと読む)
差動装置の潤滑調整機構
【課題】差動装置に焼き付きの懸念が生じた場合にその潤滑不足部分に即座にかつ十分にオイルを供給することができる差動装置の潤滑調整機構を提供する。
【解決手段】車両の操向状態を検出する舵角センサ74と、その検出情報に基づいてディファレンシャル装置20の高差動状態が発生することを推定するECU60と、車両の運転状態を検出するセンサ71〜75と、高差動状態の発生が推定されるとき、サイドギヤ24a、24bに結合するドライブシャフト31、32のうち高回転速度側のドライブシャフト31または32の近傍へのオイルの供給量を増加させる第1増量手段、および、高回転速度側のドライブシャフト31、32の近傍へのオイルの供給量が増加されたとき、センサ71〜75の検出情報に基づいて高回転速度側のドライブシャフト31または32の近傍へのオイルの供給量を増加させる第2増量手段としての流量調整バルブ53と、を備える。
(もっと読む)
油圧クラッチの作動装置
【課題】定格出力の小さな小型の電動モータで駆動する油圧ポンプを備えることができる油圧クラッチの作動装置を提供することを課題とする。
【解決手段】摩擦係合部に発生するクラッチ吸収エネルギE、油圧ポンプの吐出油量である必要吐出量QPおよび電動モータに供給する電源電圧VMを算出する(ステップS1〜S3)。そして、電源電圧供給装置の出力電圧Voutが、算出した電源電圧VMより低いとき(ステップS4→Yes)、電源電圧VMが出力上限電圧VMAX以下であれば(ステップS5→No)、出力電圧Voutを電源電圧VMまで昇圧する(ステップS10)。
一方、電源電圧VMが出力上限電圧VMAXより高いとき(ステップS5→Yes)、出力電圧Voutを出力上限電圧VMAXまで昇圧し、そのときの最大潤滑流量QMAXに基づいて設定する目標伝達トルクTOBJを油圧クラッチに発生させる(ステップS6〜S9)。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
無段変速装置
【課題】動力分配機構にトロイダル型無段変速機を用い、動力の損失が少なく、さらに小型化された無段変速装置を提供する。
【解決手段】クラッチ34が接合している時には、出力側ディスク17a側の動力は、クラッチ34を経由して、駆動輪38bと、第1の太陽歯車20と、第2の太陽歯車24とに伝達され、出力側ディスク17b側の動力は、第1のキャリア18に伝達される。また、クラッチ34が接合していない時には、出力側ディスク17a側の動力は、太陽歯車20に伝達され、出力側ディスク17b側の動力は、キャリア18に伝達される。そして、太陽歯車20に伝達された動力と、キャリア18に伝達された動力とが統合し、デフピニオンギア41aに出力され、サイドギア42aから駆動輪38aに、サイドギア42bから駆動輪38bに出力される。
(もっと読む)
ハイブリッド自動車の差動制限制御装置
【課題】前後軸間の差動制限を行う際、車両振動や駆動力変化を抑制するハイブリッド自動車の差動制限制御装置を提供する。
【解決手段】前後軸間の実回転数差及び目標回転数差を演算し、実回転数差を目標回転数差に追従させる副駆動軸補正トルクを演算し、副駆動軸補正トルクの最大値を制限する最大差動制限トルクを演算し、副駆動軸補正トルクの絶対値の上限値を最大差動制限トルクで制限したリミット出力を演算し、総駆動トルクから配分された副駆動軸駆動トルクをリミッタ出力で補正し、補正した副駆動軸駆動トルクとなるように、電動モータを制御して、差動制限を行う。
(もっと読む)
1 - 20 / 135
[ Back to top ]