
Fターム[3J552RB21]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両走行状態 (2,755) | 旋回,操舵時(カーブ走行時) (132)
Fターム[3J552RB21]に分類される特許
1 - 20 / 132
自動クラッチ制御装置
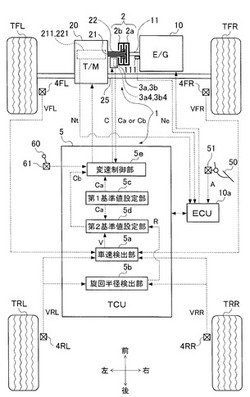
【課題】車両の旋回走行中に変速機の変速が行われるときに、車両の旋回走行の状況に応じて、運転者の運転嗜好に合った良好なユーザフィーリングが得られる変速を行うことが可能な自動クラッチ制御装置を提供する。
【解決手段】自動クラッチ制御装置1は、エンジン10のイナーシャに変速におけるエンジン10の目標回転数変化速度を乗算した目標慣性トルクを演算し、エンジン10の現出力トルクから目標慣性トルクを減算した値を、第1、第2クラッチ2a、2bの目標伝達トルクとして演算し、目標伝達トルクが得られる第1、第2クラッチ2a、2bの第1係合量基準値Caを設定する第1基準値設定部5cと、車速V及び旋回半径Rに基づいて第1係合量基準値Caを補正して第2係合量基準値Cbを設定する第2基準値設定部5dとを備えている。そして、第1、第2クラッチ2a、2bの係合量Cを、車両の直進走行中の変速時において第1係合量基準値Caに制御すると共に、車両の旋回走行中の変速時において第2係合量基準値Cbに制御する。
(もっと読む)
車両の運動制御装置

【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
自動二輪車の変速制御装置
【課題】車体のロール角に応じて駆動力伝達の態様が異なる変速制御を実行できる自動二輪車の変速制御装置を提供する。
【解決手段】自動二輪車1のエンジン13の回転駆動力を変速して後輪WRに伝達するツインクラッチ式変速機23の変速制御装置において、車体のロール角θがフルバンク状態に相当する第2のロール角θ1から第1のロール角θ2まで間の場合(例えば、45〜20度。領域C)には、通常変速制御より駆動力の経時的変化が小さいソフト変速制御によって変速動作を行う。第1のロール角θ2と第3のロール角θ3との間(例えば、20〜10度。領域B)であれば通常変速とし、直立状態から第3のロール角θ3との間(領域A)であれば通常変速制御より駆動力の経時的変化が大きいダイレクト変速で変速動作を実行する。ロール角θが第2のロール角θ1より大きい場合(領域D)は変速を禁止する。
(もっと読む)
自動変速機の変速制御装置
【課題】テンポラリマニュアルシフトモードで走行している際に、パドルシフトスイッチの操作が困難な走行状況では、運転者に代わって自動的に変速操作を行うようにする。
【解決手段】パドルシフトスイッチ3のアップシフトスイッチ3a或いはダウンシフトスイッチ3bをONして、変速モードをテンポラリマニュアルシフトモードに設定すると、目標変速段Gerがアップシフト或いはダウンシフトされ(S13)、その後マニュアルアシスト制御(S14)が実行される。マニュアルアシスト制御でダウンシフト条件が満足された場合(S24)、現在の目標変速段Gerを初期変速段αとして記憶すると共に(S26)、この目標変速段Gerを自動的にダウンシフトさせ(S28)、その後アップシフト条件を判定し、アップシフト条件が満足された場合、目標変速段Gerを初期変速段αと車速に基づいて設定したアップシフト可能変速段αgとの低い方の変速段にアップシフトさせる(S41)。
(もっと読む)
自動変速機の変速制御装置
【課題】テンポラリマニュアルシフトモードで走行している際にパドルシフトスイッチの操作が困難で且つ減速要求を検出したときは自動的にダウンシフトさせるようにする。
【解決手段】パドルシフトスイッチ3のアップシフトスイッチ3a或いはダウンシフトスイッチ3bをONすると、変速モードがテンポラリマニュアルシフトモードに設定されると共に目標変速段Gerがシフトアップ或いはシフトダウンされ(S11)、次いでマニュアルアシスト制御(S14)が実行される。マニュアルアシスト制御では、車速Vの時間微分から加速度αを算出し(S22)、加速度αが加速判定しきい値αac以上を検出した後(S23)、アクセル開度θaccの二重時間微分からアクセルペダル戻し加速度βを算出し(S26)、このアクセルペダル戻し加速度βが加速度判定しきい値βo以下のとき(S27)、現在の目標変速段Gerを自動的にダウンシフトさせる(S28)。
(もっと読む)
車両の変速制御装置
【課題】ドライバの選択した駆動力特性に応じてテンポラリマニュアルシフトモードの制御に変化を持たせることにより、ドライバが選択した駆動力特性のモードの差異を明確にしてドライバの利便性を向上させる。
【解決手段】T/M_ECUには、予め駆動特性のモードMに応じて異なるテンポラリマニュアルシフトモードの解除条件が記憶されて、テンポラリマニュアルシフトモードの際に、現在のモードに対応するテンポラリマニュアルシフトモードの解除条件を選択し、該解除条件が成立するか否かを判定してテンポラリマニュアルシフトモードの解除条件が成立する際に、テンポラリマニュアルシフトモードを自動変速モードに所定に復帰させる。
(もっと読む)
車両用駆動システム
【課題】ブレーキ減速後の再加速時の応答性を向上させ得る車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、摩擦係合要素の係合および解放を切り換えて変速段を変更する変速機4を備えている。また、車両用駆動システム1は、ブレーキ開放速度に基づいてブレーキ減速後の再加速要求の可能性を推定する再加速要求推定部513と、摩擦係合要素C1、C2、B1、B2の係合あるいは解放にかかる所定の予備動作を制御する予備動作制御部514とを備えている。そして、車両のブレーキ減速時にて、再加速要求推定部513がブレーキ減速後の再加速要求の可能性ありと判定したときに、予備動作制御部514がダウンシフトのための予備動作を所定の変速段にかかる摩擦係合要素に行わせている。
(もっと読む)
車両の制御装置および制御方法
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】駆動力源とその駆動力源の出力側に連結された変速機とを搭載した車両における前記駆動力源の回転数もしくは前記変速機の変速比を制御する車両の制御装置において、前記車両の走行状態に基づく指標を求めるとともに、その指標に基づいて前記駆動力源の要求回転数もしくは前記変速機に対する要求変速比を制御するように構成されている。
(もっと読む)
車両制御装置
【課題】データ量を抑えることができ、実現性の向上を図ることができる車両制御装置を提供する。
【解決手段】車両制御装置1では、運転者の通常ブレーキの減速度αnormalに基づいてカーブの入口に到達したときの車速Vcurve及びカーブへの進入時における最大車速Vthreshを求め、車速Vcurveが最大車速Vthreshよりも大きい場合に、運転支援制御を実施させている。このように、運転者の通常ブレーキの減速度αnormalを記憶するだけで、適切な運転支援を行うことができるため、運転者毎にカーブ等のパラメータを記憶する必要がない。したがって、データ記憶容量に記憶されるデータ量を抑えることができ、実現性の向上を図ることができる。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
船外機の制御装置
【課題】変速機とトリム角を調整可能なトリム角調整機構とを備えると共に、転舵によって生じるキャビテーションを抑制してスムーズに旋回できるようにした船外機の制御装置を提供する。
【解決手段】変速機とトリム角θを調整可能なトリム角調整機構(パワーチルトトリムユニット)とを備える船外機の制御装置において、変速機で2速が選択されていると共に、エンジンのスロットル開度の変化量が所定値以上のとき、2速から1速に変速するように変速機の動作を制御し(時刻t1)、エンジン回転数NEが所定回転数NE3以上のとき、トリムアップを開始してトリム角θが所定角度(2速用学習トリム角δ)となるようにトリム角調整機構の動作を制御すると共に(時刻t2)、転舵が開始されるとき、転舵角αに応じてトリム角θが減少するようにトリム角調整機構の動作を制御する(時刻t5)。
(もっと読む)
変速制御装置
【課題】高価なセンサを用いずに様々なコーナリング状態に応じた変速抑制制御を実行することができる変速制御装置を提供する。
【解決手段】アクチュエータによって変速段を自動的に切り換えるようにしたAMT(自動マニュアル変速機)16のAMT制御ユニット18において、通常走行状態からコーナリング状態に移行したことを判定するコーナリング状態判定部110と、コーナリング状態に移行したと判定されると、基本シフトアップテーブル131に比してシフトアップが発生しにくい変形シフトアップテーブルを生成する変形シフトアップテーブル生成部130と、通常走行時には、基本シフトアップテーブル131を用いて変速制御を行うと共に、コーナリング状態に移行したと判定されると、基本シフトアップテーブル131に替えて変形シフトアップテーブルを用いて変速制御を行う変速制御部100とを具備する。
(もっと読む)
油圧クラッチ作動装置
【課題】油圧クラッチに作動油および潤滑油を供給する油圧ポンプを制御する油圧クラッチ作動装置において、作動油を摩擦係合部での係合力を制御する指示油圧に調圧しながら、潤滑油の給油流量の制御の融通性を高めて、潤滑油による摩擦係合部の冷却効果の向上を図る。
【解決手段】油圧クラッチ作動装置Hの調圧弁74は、油圧ポンプ73が吐出する吐出油を、油圧クラッチCの摩擦係合部52,62の係合力を制御する指示油圧の作動油と、摩擦係合部52,62に供給される潤滑油とに分けると共に、潤滑油の給油流量を規定する流路面積を変更可能である。制御装置Uは、摩擦係合部52,62が係合状態になるとき、流路面積が摩擦係合部52,62での回転速度差に基づいて可変に設定される設定面積になるように調圧弁74を制御し、流路面積を前記設定面積としている調圧弁74により作動油が指示油圧に調圧されるように油圧ポンプ73を制御する。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車両駆動力制御装置
【課題】 登坂路等の走行環境が変化した場合であっても、ドライバーの意図する加速感が得られ、かつ燃費を向上させる車両駆動力制御装置を提供する。
【解決手段】 本発明の車両駆動力制御装置は、アクセル開度に基づきアクセルペダル踏み込み開始後の経過時間を算出する経過時間算出手段と前記アクセル開度と駆動力との関連特性に基づいて第1の駆動力を算出し、前記第1の駆動力を基準値として、前記経過時間の増加量に伴って漸次減少する第2の駆動力を算出する駆動力算出手段と前記第1の駆動力または第2の駆動力のうち、いずれの駆動力を目標駆動力とするかを判定する目標駆動力判定手段と少なくとも前記目標駆動力判定手段により得られた目標駆動力に基づいて駆動力操作量を算出する駆動力操作量算出手段と前記駆動力操作量に基づいて前記駆動力源の駆動力を制御する駆動力制御手段とを備える。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
車両用自動変速機の制御装置
【課題】旋回中の変速動作を適切に設定できる車両用自動変速機の制御装置を提供すること。
【解決手段】車両は、車両の前後方向の加速度を検出する前後加速度検出手段と、車両の幅方向の加速度を検出する横加速度検出手段とを具えている。自動変速機の制御装置は、ハンドル操舵角と車速から推定横加速度を算出する推定横加速度算出手段と、推定横加速度の値と横加速度の値との差である横加速度偏差を算出する横加速度偏差算出手段を具えている。ある前後加速度の値と横加速度の値とからなる加速度状態が、変速禁止を行う状態か否かを判定する判定値を横加速度偏差に応じて補正する変速禁止領域補正手段を具えている。これにより、アップシフトが禁止される領域を補正し、補正された変速禁止領域を用いて自動変速機を制御する。
(もっと読む)
自動変速機の変速制御装置
【課題】ハイ側変速段を制限し始める直前における無駄で煩わしいアップシフトを抑制し得る変速制御装置を提案する。
【解決手段】自車からカーブ入口までの距離L1が接近判定距離未満になるt0と、この距離L1が0になるt3との間であって、アクセル開度APOをアイドル開度にする減速操作が行われるt2に、ハイ側変速段を、車速VSPが瞬時t3に安全なカーブ通過速度となるのに必要な上限変速段に制限する。ハイ側変速段制限制御が開始される前は変速パターンに基づく変速制御であるため、t2直前に破線で示すように無駄なアップシフトが発生する。これを抑制するため、カーブ入口で車速VSPを安全なカーブ通過速度に低下させるのに必要な時々刻々の目標減速度G1を演算し、設定減速度G1s以上になるt1に、即ちハイ側変速段の制限が必要になると予想されるとき、アップシフト変速線を高車速側へ移動させる。
(もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車両用自動変速機の制御装置
【課題】ヒステリシス領域から燃費のよい変速段に変速する場合のビジーシフトを防止する。
【解決手段】車両の駆動状態もしくは走行状態が前記変速線図におけるヒステリシスが設定されている領域に所定時間以上とどまっている場合に、燃費の良好な変速段への変速を実行するように構成された制御装置において、前記車両の状態が前記変速線図における前記ヒステリシスが設定されている領域に所定時間以上とどまっている現在時点からビジーシフトを禁止するべく設定した所定時間が経過するまでの間に前記変速線図に基づいた変速が生じることを予測する変速予測手段(ステップS101〜S108)と、前記変速線図に基づいた前記変速が予測されない場合に前記燃費の良好な変速段への変速を実行する変速段選択手段(ステップS112)とを備えている。
(もっと読む)
1 - 20 / 132
[ Back to top ]