
Fターム[3J552VB04]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両からの情報 (3,501) | 加,減速度 (484)
Fターム[3J552VB04]の下位に属するFターム
横方向(G) (36)
Fターム[3J552VB04]に分類される特許
121 - 140 / 448
車両の制御装置
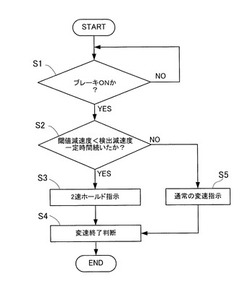
【課題】急制動停止後の車両の再発進時でも、変速機とプロペラシャフトの連結部近傍におけるガタ打ち音等のノイズを抑え得る車両の制御装置を提供する。
【解決手段】エンジンから駆動車輪への動力伝達経路を形成する自動変速機およびプロペラシャフトの結合部近傍にスプライン嵌合部を有する車両にあって少なくとも自動変速機を制御する車両の制御装置において、車両の制動要求操作を検出する制動要求操作検出手段(S1)と、車両の減速度を検出する減速度検出手段(S2)と、車両の停止を検出する車両停止検出手段(S4)と、これら検出手段の検出情報に基づいて作動し、車両が閾値を超える急減速度で制動されて自動変速機の変速比が特定の変速比へと低速側に切り替わったとき(S2)、制動要求操作が検出される状態下でさらに低速側の変速比に切り替えることなく車両の停止まで特定の変速比を保持する変速比保持制御手段(S3)と、を備える。
(もっと読む)
ハイブリッド車両の制御装置

【課題】 回生量の増加および加速遅れの抑制を図ることができるハイブリッド車両の制御装置を提供する。
【解決手段】 駆動輪RL,RRに駆動力を付与可能なエンジンEと、駆動輪RL,RRと自動変速機ATを介して連結したモータジェネレータMGと、ドライバの選択により、自動変速機ATの変速モードを、ATモードとMモードとの一方に切り替える変速モード切り替えスイッチ26と、ドライバのATモードからMモードへの切り替えを検出する変速モード切り替え検出部10bと、Mモードにおけるドライバの選択ギア段を検出するギア段検出部10cと、ドライバがATモードからMモードへの切り替えたときのドライバの選択ギア段が変速モード切り替え直前のギア段よりも高い場合、車両の走行モードを、EV走行モードとし、それ以外の場合にはHEV走行モードとする走行モード切り替え部10aと、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 急減速した場合であっても、車速や要求駆動力に適した変速段を達成可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 自動変速機を備えたハイブリッド車両において、急減速時には締結要素を解放して変速要求手段により要求された変速段に変速することとした。
(もっと読む)
車両クルーズコントロールを制御する方法及び装置
本発明は、車両(1)における車両クルーズコントロールを制御する方法及び装置であって、前記車両の可能な走行ルートについて出発地点と最終目的地を記録するステップと;前記走行ルートについての所望の走行時間を記録するステップと;可能な限り低い燃料消費量で、所望の走行時間に前記最終目的地に到着するように、前記クルーズコントロールのパラメーターについての制限値を計算し、設定するステップとを含む。 (もっと読む)
車両用動力伝達装置の制御装置
【課題】コースト走行時に跳びダウン変速が実行されるに際して、出力軸トルクのトルク変動を抑制することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】自動変速部20のコースト走行中に跳び変速が実施されるに際して、自動変速部20の入力軸回転速度が中間変速段の同期回転速度付近になると、緩変化制御手段88は、入力軸回転速度の変化速度を緩和させるため、入力軸回転速度が中間変速段の同期回転速度付近に達したときに、係合装置の摩擦材間の引き摺りによって生じる引き摺りトルクが低減される。したがって、自動変速部20の出力軸22のトルク変動を低減することができ、ドライバビリティーを向上させることができる。
(もっと読む)
車両用自動変速機の制御装置
【課題】一方向クラッチの係合により成立させられる変速段において一方向クラッチが空転状態であるときに加速要求がなされた際に、駆動力レスポンスの向上と同期ショックの低減とを両立する。
【解決手段】トルクアップ後エンジントルクTE+UPがエンジン最大トルクTEMAXを超える場合には、同期前制御手段110により、エンジントルクアップTUP量が抑制されると共に、そのエンジントルクアップTUP量の抑制に応じて第2速ギヤ段を成立させる為のブレーキB1に発生させるクラッチトルクTCが抑制されるので、一方向クラッチF1の同期が促進され、その同期後に自動変速機10の実際の出力トルクTOUTを最終的な目標出力トルクTOUT*に向かって速やかに増大させることができて不感帯を解消することが可能になる。
(もっと読む)
ロックアップクラッチ付きトルクコンバータの油圧制御装置
【課題】ロックアップクラッチ(LC)の係合時の油圧応答性を確保しながらも、車両の急制動時などに迅速に非係合状態にできるようにする。
【解決手段】トルクコンバータTのカバー10と油圧ピストン25との間に画成された油室30の油圧を制御する装置1であって、油室30への作動油の給排切替によりLCの係合制御を行う第1のシフトバルブ31と、油室30からの作動油を導出する第1、第2の排出油路37,39を切り替える第2のシフトバルブ33とを備え、第2の排出油路39は、第1の排出油路37よりも油路長が短くかつ低位置に開口しており、車両の運転状態を通常運転時と判断したとき、油室30から排出される作動油を第2のシフトバルブ33で第1の排出油路37に導出する一方、急速ロックアップオフ必要時と判断したとき、当該作動油を第2の排出油路39に導出するようにした。
(もっと読む)
無段変速機の制御装置
【課題】登坂路走行時に違和感なく走行できる無段変速機の制御装置を提供すること。
【解決手段】実際の車両の走行状態から路面の勾配を推定し、路面の勾配が登坂判定値以上であって、かつ実入力回転数が路面の勾配に応じて設定された最低目標入力回転数以下であるとき、最低目標入力回転数を下限値とせずに通常の変速制御を実施する。一方、路面の勾配が登坂判定値以上であって、かつ実入力回転数が最低目標入力回転数を超えたとき、最低目標入力回転数を下限値として変速制御を実施する。実入力回転数が最低目標入力回転数を超えるまで登坂制御を延期するため、運転者の予期しない入力回転数の上昇を回避できる。
(もっと読む)
車両の制御装置
【課題】エンジンのオーバレブを防止しながら、手動変速モードでの手動変速可能領域を拡大する。
【解決手段】トルクコンバータ滑り量に応じてダウンシフト許可車速を可変に設定する。具体的には、トルクコンバータ滑り量が0のときの基準ダウンシフト許可車速と、ダウンシフト後の自動変速機の変速比とを用い、現在のトルクコンバータ滑り量及びダウンシフト後の変速比に基づいて許可車速補正量を求め、前記基準ダウンシフト許可車速から前記許可車速補正量を減算した値をダウンシフト許可車速とすることで、ダウンシフト許可車速を可変に設定する。このような設定により、トルクコンバータ滑り量が小さいほどダウンシフト許可車速を高速側に設定することが可能になるので、手動変速モード選択時のダウンシフト許可領域を拡大することができる。
(もっと読む)
車両用変速制御装置
【課題】ビジーシフトの防止と燃費の向上とを両立させることのできる車両用変速制御装置を提供する。
【解決手段】駆動力源の出力側に連結された変速機の変速比を段階的に変化させることにより駆動力源の回転数を制御し、かつ駆動力源の動作状態を示す指標として予め定めた値が変速比を低下させるアップシフト閾値を超えた場合に変速比を低下させるように構成された車両用変速制御装置において、車両が加速している場合に、アップシフト閾値を、車両が加速していない場合に比較して、変速比を低下させる変速が生じ易い値に相対的に変更する変速促進手段(ステップS3)とを備えている。
(もっと読む)
ハイブリッド車両の制御装置
【課題】電気自動車モードからエンジン始動モードに切り替わる際、エンジン始動を早めることができると共に、確実にG抜けを防止することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータジェネレータMGを断続する第1クラッチCL1と、モータジェネレータMGと左右後輪RL,RRを断続する第2クラッチCL2と、を有し、「HEVモード」と「EVモード」と「エンジン始動モード」を切り替えて走行するFRハイブリッド車両の制御装置である。「EVモード」から「エンジン始動モード」に切り替わった後、第2クラッチCL2へのトルク容量指令値を、モード切り替え直前のEV駆動トルク相等以上の値で一定とし、第2クラッチCL2のスリップを検知するまでモータジェネレータMGへのモータトルク指令値を徐々に増加させ、スリップを検知すると第1クラッチCL1を締結側に移行してエンジンEngを始動するエンジン始動制御手段(図2)を設けた。
(もっと読む)
車両の制御装置および制御方法
【課題】無段変速機を搭載した車両が駆動状態であるか被駆動状態であるかを適切に判定する。
【解決手段】ECUは、車両の加速度がゼロよりも大きく(S100にてYES)、かつ、アイドル接点がオフであると(S102にてYES)、車両が駆動状態であると判定するステップ(S104)と、推力比マップ(1)を選択するステップ(S106)と、車両が加速度がゼロ以下であるか(S100にてNO)、または、アイドル接点がオンであると(S102にてNO)、車両が被駆動状態であると判定するステップ(S108)と、推力比マップ(2)を選択するステップ(S110)と、変速制御を実施するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
自動変速機の制御装置
【課題】アップシフト変速における変速ショックの低減を図ることが可能な自動変速機の制御装置を提供する。
【解決手段】アップシフト変速中にあってエンジン2にトルクダウン指令を出力するトルクダウン制御手段27は、イナーシャ相中にてトルクダウン指令を出力する第1トルクダウン制御27aと、トルク相からイナーシャ相中にかけてトルクダウン指令を出力する第2トルクダウン制御27bとを実行し得る。吸収可能判定手段25がイナーシャ相にて発生するイナーシャトルクを第1トルクダウン制御27aによるトルクダウンにより吸収可能であるか否かを判定し、トルクダウン制御選択手段28が、第1トルクダウン制御27aでイナーシャトルクを吸収可能である際に第1トルクダウン制御27aを選択し、吸収不能である際に第2トルクダウン制御27bを選択するので、トルクダウン制御の最適化が図られる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】登降坂路におけるドライバビリティのより一層の向上を図る。
【解決手段】アクセルオフ状態でハイブリッド自動車が比較的急な降坂路を走行しているときに、回転数Nm2の算出に関連したエイリアシングが発生していないと判断された場合、実加速度と推定加速度とに基づく路面勾配θに対応した勾配起因シフトレンジSRgが制御用シフトレンジSR*として設定され(S230)、当該エイリアシングが発生していると判断された場合には、制御用シフトレンジSR*が前回値に保持される(S240)。これにより、上記エイリアシングが発生していると判断されたときには、エイリアシングが発生していると判断される直前に求められた路面勾配θに対応した勾配起因シフトレンジSRgに基づいてエンジン22とモータMG1およびMG2とが制御される。
(もっと読む)
制動力制御装置及び制動力制御方法
【課題】車両の制動力を制御することが可能な制動力制御装置及び制動力制御方法を提供する。
【解決手段】変速機10を介して第一駆動輪12に接続するエンジン2のエンジンブレーキにより、第一駆動輪12に制動力を付加するとともに、第二駆動輪20に接続する第二モータ6の回生制動により、第二駆動輪20に制動力を付加して車両Cの制動力を制御する際に、第二モータ6の回生制動により第二モータ6が発電した発電電力を、エンジン2の駆動軸を駆動可能な第一モータ4に供給して第一モータ4を駆動させ、この駆動させた第一モータ4の駆動トルクが増加するほど、変速機10の変速比が増加するように、変速機10の変速比を制御する。
(もっと読む)
車両の動力伝達機構をコントロールするための方法およびシステム
車両のための動力伝達機構をコントロールするための方法およびシステムであって、道路状態を記録するステップ、前記記録された道路状態が標準道路状態に対応する場合には、通常の道路における状態に対応する標準モードで前記車両を運転するために意図された第1のギア選択コントロール・アルゴリズムを使用するステップ、および前記記録された道路状態が軟弱地表面道路状態に対応する場合には、軟弱地表面道路における状態に対応する軟弱地表面モードで前記車両を運転するために意図された第2のギア選択コントロール・アルゴリズムが使用されるステップ、を有する。本発明は、AMTが備えられた車両を増大する条件の多様性の下に満足のゆく形で動作すべく適合させることを目的とする。 (もっと読む)
省燃費運転システム及びその制御方法
【課題】上り坂を走行中に上り坂に関する道路勾配情報データベースを構築することが出来て、上り坂を走行する際に省燃費走行を行なう様なアドバイスや車両制御を行なうことが出来る省燃費運転システム及びその制御方法の提供。
【解決手段】車速を計測する装置(3)と、車両の加速度を計測する装置(4)と、燃料流量を計測する装置(5)と、エンジン負荷を計測する装置(6)と、エンジン回転数を計測する装置(7)と、シフト位置を検出する装置(9)と、上述した各装置からの信号を受信して演算と解析を行なう制御装置(10)とを備え、該制御装置(10)はエンジン出力を演算し、演算されたエンジン出力がエンジン出力規定値(Pa)以上であるが、車両加速度が車両加速度規定値(αa)以下であれば上り坂を走行していると判断する機能を有している。
(もっと読む)
自動変速機の制御装置
【課題】自動変速機の制御装置において、適正なキックダウン制御を可能としてドライバビリティの向上を図ると共に燃費の向上を図る。
【解決手段】ドライバによるキックダウン操作を検出したとき、アクセル開度と車速に基づいてキックダウン操作から予め設定された所定時間経過後の目標変速段を設定し、目標変速段が現在の変速段より低速側であるときには、スロットル開度と車速に基づいてシフトダウンを実行する一方、目標変速段が現在の変速段と同じかまたは高速側であるときにはシフトダウンを禁止する。
(もっと読む)
自動変速機の手動ダウンシフト制御装置
【課題】自動変速モードから手動変速モードへの切り替えによる手動ダウンシフトが、運転意図や、走行状態や、走行条件に符合した変速段への変速となるようにする。
【解決手段】S11で手動変速モードへの切り替え(手動ダウンシフト要求)があったと判定し、S12でコースティング(惰性)走行と判定する、減速用手動ダウンシフト時に、S15で、運転傾向から指数化したスポーティー走行度合いが設定度合い以上であるか、または、上記減速用手動ダウンシフト時の車両減速度が設定減速度以上であると判定する場合、S16において、強いスポーティー走行度合いであるほど、また、減速用手動ダウンシフト時の車両減速度が高いほど、減速用手動ダウンシフト時の目標減速度Gxoを高く設定する。S18では、このGxoを実現する手動変速段を減速用手動ダウンシフト時目標変速段と定め、S19で、当該目標変速段への変速処理を行う。
(もっと読む)
車両用駆動装置の制御装置
【課題】電気式差動部と変速部とを備える車両用駆動装置において、変速部の変速に際して、電気式差動部を適切に制御することにより変速ショックを抑制する。
【解決手段】自動変速部20の変速中には、その変速に伴って実エンジン回転速度NEが目標エンジン回転速度NE*に対して乖離することを抑制するように一時的に変速M1トルクTFFM1が出力され、自動変速部20の変速中における回転速度差ΔNEに基づいてその回転速度差ΔNEを抑制する方向に、変速M1トルクTFFM1を出力する開始時点が学習制御により補正されるので、自動変速部20の変速に際して実エンジン回転速度NEが目標エンジン回転速度NE*に対して乖離することが適切に抑制される。
(もっと読む)
121 - 140 / 448
[ Back to top ]