
Fターム[3J552VB04]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両からの情報 (3,501) | 加,減速度 (484)
Fターム[3J552VB04]の下位に属するFターム
横方向(G) (36)
Fターム[3J552VB04]に分類される特許
61 - 80 / 448
無段変速装置

【課題】運転者が変速比を選択する手動変速モードを実現する機能を有する構造で、無段変速装置の変速比を、運転者が選択した変速比に迅速に変更可能で、しかも優れた信頼性及び耐久性を確保できる構造を実現する。
【解決手段】手動変速機能に基づいて選択された目標変速比と現在の変速比である現状変速比との間に、低速モードと高速モードとの切換ポイントが存在する場合に、前記目標変速比が選択された事を検知した後、直ちに低速用クラッチと高速用クラッチとの断接制御を開始する。
(もっと読む)
無段変速装置

【課題】自動変速モードと手動変速モードとのうち、手動変速モードで運転を行っている場合に、運転者の変速操作がなくても駆動源(エンジン)が許容限度を超える状態で運転される事を防止できる構造を実現する。
【解決手段】運転者が選択した変速段に対応する速度比に調節されている状態で、その速度比のまま運転を続けると、例えば駆動源の回転速度が最大許容回転速度を超えると判定される場合には、手動変速モードが選択されているにも拘らず、速度比を当該変速段に対応する速度比から自動的に増速する。又、駆動源の回転速度が最小許容回転速度未満になると判定される場合には、同じく手動変速機能が選択されているにも拘らず、速度比を当該変速段に対応する速度比から自動的に減速する。
(もっと読む)
自動変速機の制御方法および制御装置
【課題】スリーブに押付け荷重を印加して、スリーブをリングに押付ける際、運転者に加速意志がある場合は、可能な限り短時間でスリーブを移動せしめてスリーブをリングに押付けることにより、運転者の意志に応じた変速の可能な自動変速機の制御方法および制御装置を提供することにある。
【解決手段】パワートレーン制御ユニット100は、スリーブ21,22,23を遊転ギア側へ押しつけて同期装置51,…,56の噛合いを行う際に、検出または推定した車両の前後加速度に応じて、検出または推定した車両の前後加速度が大きくなるにつれて、スリーブの移動速度を速くするように、スリーブの移動速度を調節する。
(もっと読む)
無段変速機
【課題】ドライバからの変速操作により適切な変速比を選択可能な無段変速機を提供する。
【解決手段】無段変速機構40,50,60と、第1の変速操作が入力される第1の変速操作部112と、第2の変速操作が入力される第2の変速操作部113と、第1及び第2の変速操作部から入力される変速操作に応じて無段変速機構の変速比を変化させる変速制御部100とを備える無段変速機1を、変速制御部は複数段の変速比が予め設定されるとともに、第1の変速操作に応じて次段の変速比への変速を行わせ、第2の変速操作に応じて次段の変速比と次々段の変速比との中間に設定される中間変速比への変速を行わせる構成とする。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
無段変速機
【課題】ドライバからの変速操作により適切な変速比を選択可能な無段変速機を提供する。
【解決手段】無段変速機構40,50,60と、変速操作が入力される変速操作部110と、変速操作部から入力される変速操作に応じて無段変速機構の変速比を変化させる変速制御部100とを備える無段変速機1を、変速操作部は第1の変速操作及び第1の変速操作に引き続いて行われる第2の変速操作が入力可能であり、変速制御部は、複数段の変速比が予め設定されるとともに、第1の変速操作に応じて無段変速機構に次段の変速比への変速を行わせ、第2の変速操作に応じて次段の変速比と次々段の変速比との中間に設定される中間変速比への変速を行わせる構成とする。
(もっと読む)
ベルト式無段変速機の制御装置
【課題】本発明は、ベルト式の無段変速機の制御装置に関し、とりわけ、駆動ベルトの減速時に行うベルト挟圧の上昇制御を減速度に応じて変化させることが可能な無段変速機の制御装置を提供するものである。
【解決手段】本発明のベルト式無段変速機の制御装置では、車速検出手段と減速度検出手段とフットブレーキのオンオフ検出手段とを備え、さらに、車両の速度が所定車速以下でありフットブレーキのオン状態であるときには第一の挟圧値まで増圧させ、第一の挟圧値から所定時間後の減速度に応じて前記複数の挟圧制御工程を選択し、第二の挟圧値及び/又はそれ以降の挟圧値に増圧、維持あるいは減圧させる制御を実行する。
(もっと読む)
車両制御システム
【課題】運転者に違和感を与えることを抑制することができる車両制御システムを提供すること。
【解決手段】車両制御システムは、車両に加速度を発生する加速度発生装置(エンジン4、ロックアップクラッチ51、自動変速機52)と、運転者によるアクセルの操作に応じたアクセル開度Paと、車両の車速vとに基づいて加速度発生装置を制御するECU6とを備える。ECU6は、アクセル開度Paと車速vとに基づいた要求加速度に基づいてエンジン4を制御するとともに、アクセル開度Paおよび車速vに基づいた目標クラッチ状態Loおよび目標変速比γoに基づいてロックアップクラッチ51および自動変速機52を制御する。
(もっと読む)
車両のシフト切替制御装置
【課題】RorD→P操作に伴って自動変速機がRorDポジションからPポジションへ切り替えられる際、ドライブラインに蓄積される駆動力を抑制し、パーキングロック解除時のショックを抑制する。
【解決手段】RorD→P操作が運転者により為された際は、ブレーキオンとされていること及び路面勾配θRが所定勾配θR’以下の場所での車両停止状態であることのうちの少なくとも何れかであることを条件として、シフト切替機構によるパーキングポジションへの切替えに先立って、シフト切替機構によるRorDポジションを維持したまま自動変速機内の動力伝達経路が遮断される自動変速機のニュートラル状態を形成し、所定の遅延時間TDEL経過後にシフト切替機構によるパーキングポジションへの切替えを開始するので、自動変速機のRorDポジション時の駆動力Fが抑制されてからパーキングギヤがロック状態とされる。
(もっと読む)
車両を運転する方法およびシステム
本発明は、燃焼エンジンに接続されかついくつかの異なる速度伝達比に設定可能である、車両の変速機を制御する方法に関し、本方法は、車両を推進させる出力の必要性が低下している状況で前記車両が、低速度伝達比で、かつ前記低伝達比のトルク平坦域が得られるエンジン速度よりも下のエンジン速度で走っているとき、前記車両の速度パラメータを決定するステップと、前記速度パラメータが第1の基準を満たすとき変速機を前記低伝達比よりも高い速度伝達比に切り換えるステップとを含む。 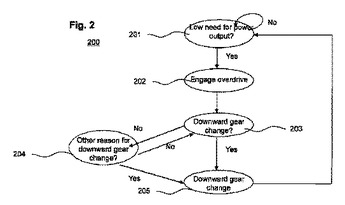 (もっと読む)
(もっと読む)
車両を運転する方法およびシステム
本発明は、燃焼エンジンに接続された変速機が、様々な異なる速度伝達比に設定可能であり、さらに、低速度伝達比のトルク平坦域が得られるエンジン速度よりもエンジン速度が低い前記低伝達比に設定可能である、車両を運転する方法に関する。第1のモードでは、車両が前記エンジンへの燃料供給なしに運転され、さらに第2のモードでは、前記エンジンが燃料供給を与えられて前記車両を推進する推進力を供給するように、車両は、前記低伝達比で前記第1のモードおよび前記第2のモードで運転するように構成されている。本方法は、車両が、前記第1のモードに従って運転されるべきか前記第2のモードに従って運転されるべきかを、推進力の必要性に基づいて決定することを含む。 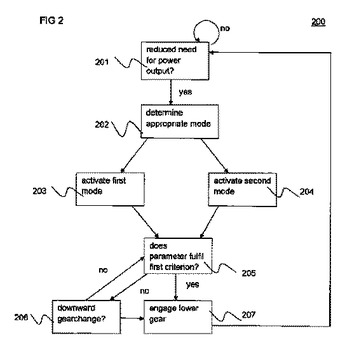 (もっと読む)
(もっと読む)
無段変速装置
【課題】低速モードと高速モードとのモード切換を滑らか、且つ、迅速に行える構造を、簡素な構成で実現する。
【解決手段】モード切換時に接続される一方のクラッチ(低速用クラッチ又は高速用クラッチ)を、このモード切換を開始する以前から、その時点での運転状況に応じて仮接続させておく。具体的には、トロイダル型無段変速機の変速比が増速比で例えば0.6以下の状態で、一方のクラッチの断接状態を制御する電磁弁のduty開度を例えば14%の状態にし、この一方のクラッチを仮接続させておく。
(もっと読む)
自動降坂速度制御システム
機械の降坂速度を自動的に制御する方法。この方法は、現在の機械速度に基づいて目標機械速度を決定するステップと、勾配が所定の閾値より大きいこと、等の少なくとも1つのトリガ条件が満たされたか否かを判断するステップと、を含む。条件が満たされた場合、この方法は、制御システムを有効化して、パワートレインリターダとトランスミッションギアチェンジのうちの少なくとも一方を制御して、目標機械速度の超過を防止する。  (もっと読む)
(もっと読む)
自動変速機の制御装置
【課題】車両が登坂路をパワーオン走行しながら減速中にダウンシフトする際、エンジン回転数とタービン回転数との差回転に起因して発生する変速ショックを抑制する。
【解決手段】ECU100は、パワーオン状態でダウンシフトの要求があると判定し(ステップST1:YES)、さらに、車両の加速度が基準加速度未満であると判定すると(ステップST2:YES)、車両の加速度および、エンジン回転数とタービン回転数との差回転数に応じて、解放側摩擦係合要素の解放動作の開始タイミングを遅延側に補正するとともに、解放側摩擦係合要素のスイープダウン指示油圧の低下率が小さくなるように補正する(ステップST3,ST4)。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
自動変速機の制御装置
【課題】マニュアルモードの利便性を向上させる。
【解決手段】変速段をロー側に切り換えたときに得られる最大加速度G1が車速V1に基づき設定されている。また、第1設定率αがアクセル開度等に基づき設定されている。1回目のダウンシフト操作が行われた場合には、最大加速度G1第1設定率αが乗算され、要求加速度GrとしてGra1が設定される。そして、要求加速度Gra1に最も近い車両加速度が得られる要求変速段として第4速の変速段が設定される(符号Sa1)。ここで、現在の変速段が第7速であることから(符号Sa0)、要求変速段の第4速がそのまま目標変速段として設定され、第7速から第4速に2段飛ばしてダウンシフトが実行される。このように、要求加速度に基づき目標変速段を設定するようにしたので、適切な車両加速度を得ることが可能となり、シフト操作回数を抑制することが可能となる。
(もっと読む)
車両用自動変速機の制御装置
【課題】デファレンシャルギヤの焼き付きを防止すると共に、車輪スリップ解消時の不要なエンジンブレーキによる減速感を回避できる車両用自動変速機の制御装置を提供する。
【解決手段】スリップ判定中は自動変速機の少なくともアップシフトを禁止するスリップ制御手段と、登坂判定中は自動変速機のアップシフトを禁止する登坂制御手段と、を備えた車両用自動変速機において、スリップ判定の解除から所定時間経過後まで、登坂制御手段による登坂判定を禁止する登坂判定禁止手段を設ける。低μ路で車輪スリップが発生した後で高μ路に差しかかった時に、登坂路と誤判定するのを防止でき、不要なエンジンブレーキによる不快な減速感を解消できる。
(もっと読む)
車両用自動変速機の制御装置
【課題】旋回中の変速動作を適切に設定できる車両用自動変速機の制御装置を提供すること。
【解決手段】車両は、車両の前後方向の加速度を検出する前後加速度検出手段と、車両の幅方向の加速度を検出する横加速度検出手段とを具えている。自動変速機の制御装置は、ハンドル操舵角と車速から推定横加速度を算出する推定横加速度算出手段と、推定横加速度の値と横加速度の値との差である横加速度偏差を算出する横加速度偏差算出手段を具えている。ある前後加速度の値と横加速度の値とからなる加速度状態が、変速禁止を行う状態か否かを判定する判定値を横加速度偏差に応じて補正する変速禁止領域補正手段を具えている。これにより、アップシフトが禁止される領域を補正し、補正された変速禁止領域を用いて自動変速機を制御する。
(もっと読む)
自発的な燃料/ペダルオフ時の自動車の自動変速機を制御する方法
【課題】自発的な燃料/ペダルオフ(ファストオフ)時の自動車の自動変速機を制御する方法を提供する。
【解決手段】自動変速機は加速ペダルを介して影響を受ける内燃機関によって駆動され、ペダル位置に比例した信号がシフトマップを内蔵する電子式変速機制御装置へ送られ、ペダル位置グラジエント(PSTG)がペダル位置グラジエント限界値(KF_PSTG)よりも小である場合に自発的な燃料/ペダルオフ(ファストオフ)が認識されてアップシフトブロック(FFO=1)が実行される。アップシフトブロック(FFO=1)の状態は、エンジン回転数(NMO)と等価の関数として設定されたトラクション・エンジンブレーキ特性曲線(KL_ZS)を実際のエンジンモーメント(MMM)が上回った場合に、トラクション運転を認識するのに伴い、全走行抵抗(GFW)に関連した車加速度/減速度及びペダル位置グラジエント限界値に関連して解消される。
(もっと読む)
自動変速機の変速制御装置
【課題】ハイ側変速段を制限し始める直前における無駄で煩わしいアップシフトを抑制し得る変速制御装置を提案する。
【解決手段】自車からカーブ入口までの距離L1が接近判定距離未満になるt0と、この距離L1が0になるt3との間であって、アクセル開度APOをアイドル開度にする減速操作が行われるt2に、ハイ側変速段を、車速VSPが瞬時t3に安全なカーブ通過速度となるのに必要な上限変速段に制限する。ハイ側変速段制限制御が開始される前は変速パターンに基づく変速制御であるため、t2直前に破線で示すように無駄なアップシフトが発生する。これを抑制するため、カーブ入口で車速VSPを安全なカーブ通過速度に低下させるのに必要な時々刻々の目標減速度G1を演算し、設定減速度G1s以上になるt1に、即ちハイ側変速段の制限が必要になると予想されるとき、アップシフト変速線を高車速側へ移動させる。
(もっと読む)
61 - 80 / 448
[ Back to top ]