
Fターム[3J552VC01]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 駆動源からの情報 (3,573) | 回転数(エンジン回転数等) (1,574)
Fターム[3J552VC01]に分類される特許
161 - 180 / 1,574
車両用自動変速機
【課題】車両の動力伝達系から発生する、いわゆるガラ音を防止した車両用自動変速機を提供する。
【解決手段】車両の走行状態等から、ガラ音が発生するか否かを判定する。ガラ音の発生が予測される場合は、自動変速機の微小滑り制御を、ガラ音対策の微小滑り制御に変更する。ガラ音対策の微小滑り制御は、通常時の微小滑り制御における目標滑り量を大きい値とする。これにより、ガラ音対策時微小滑り制御時には、クラッチの滑り量が多くなり、エンジン回転数の変動が動力伝達系に伝達されず、動力伝達系によるガラ音の発生が低減される。
(もっと読む)
車両の駆動力制御装置

【課題】マニュアル変速モードが選択されている場合においても、運転モード毎の駆動力特性の差をドライバに実感させることができる車両の駆動力制御装置を提供する。
【解決手段】駆動力特性のモードMを複数備えたパワートレイン10において、当該パワートレイン10を構成する無段変速機3の制御モードとしてマニュアル変速モードが選択されているときの自動アップシフト回転数Nuを、パワートレイン10が発生させる駆動力特性のモードM毎に異なる値に設定する。これにより、基本的には変速についてドライバの意思を尊重するマニュアル変速モードにおいても、各モードMにおける駆動力特性の特徴(本実施形態においてはエンジン1の出力特性の相違をベースとする駆動力特性の特徴)を明確に差異付けることができる。
(もっと読む)
車両の制御装置
【課題】負圧回復制御を通じて負圧が確保されたときに、運転者が予期していないタイミングにおいて変速段の変更が実行されることを抑制することのできる車両の制御装置を提供する。
【解決手段】本願発明に係る車両の制御装置である電子制御装置100は、ブレーキブースタ30の機能を十分に発揮させるために必要とされる負圧が確保できていないときに、自動変速機20の変速段を、変速制御を通じて選択される変速段よりも変速比の大きな変速段に変更する負圧回復制御を実行する。電子制御装置100は、負圧回復制御を通じて負圧が確保できるようになった場合であってもアクセルペダル40が操作されるまで負圧回復制御を継続させ、アクセルペダル40が操作されたときに負圧回復制御を終了させる。
(もっと読む)
油圧制御装置
【課題】アキュムレータが開放した状態となっても、車両の走行時におけるベルト式無段変速機の変速制御を好適に行うことができる油圧制御装置を提供する。
【解決手段】ベルト式無段変速機を油圧により変速制御する油圧制御装置13において、セカンダリ油圧室63へ向けてオイルを供給する機械オイルポンプ24と、セカンダリ油圧室63へ向けて蓄圧したオイルを供給するアキュムレータ73と、アキュムレータ73とセカンダリ油圧室63とをつなぐ第2油路L2を開閉可能な方向制御弁82と、方向制御弁82を作動させる第2電磁制御弁83bを制御すると共に、セカンダリ油圧室63の油圧を制御可能なECU14と、を備え、ECU14は、方向制御弁82または第2電磁制御弁83bにより第2油路L2が開放した状態で制御不能となった場合、セカンダリ油圧室63の油圧が、アキュムレータ73の初期封入圧以下となるように油圧制御する。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
作業車両
【課題】重負荷時には、エンジン回転数を低下させ、車速を低下させることにより、エンストを防止することができ、軽負荷時には、エンジン回転数の上昇を抑制して低燃費で走行することができる作業車両を提供する。
【解決手段】エンジン負荷率Lが、設定した重負荷値L1よりも大きくなった場合、車速Vを一定に維持しながらエンジン回転数Nrを増加させ、エンジン回転数Nrがエンジン回転数上限値Nmaxまで増加した後、エンジン負荷率Lが、設定した重負荷値L2よりも大きくなった場合、車速Vを減少させるように、エンジン回転数変更アクチュエータ93と変速アクチュエータ91とを制御する重負荷モードと、エンジン負荷率Lが設定した軽負荷値L4よりも小さくなった場合、車速Vを一定に維持しながらエンジン回転数Nrを減少させるように、エンジン回転数変更アクチュエータ93と変速アクチュエータ91とを制御する軽負荷モードと、を備える。
(もっと読む)
自動変速機
【課題】 スリップ制御中であっても、自動変速機の異常の誤判定を低減できる自動変速機を提供すること。
【解決手段】 スリップ制御中は、実際の変速比をスリップ回転数に基づき補正した値が、目標変速比の所定範囲外であるときには、変速機内に異常が発生していると判定することとした。
(もっと読む)
デュアルクラッチ式自動変速機の制御装置
【課題】常に適切なタイミングでシフトアップを実行することにより良好な加速感を実現した上で、エンジンの吹け上がりに起因するトルク制限域への突入を未然に防止でき、もってこれに起因する減速感を伴うショックを未然に防止できるデュアルクラッチ式自動変速機の制御装置を提供する。
【解決手段】アクセル開度が大の車両加速時において、高ギヤ側の次変速段へのプリセレクト後に変速線に基づきシフトアップを可決したとき(ポイントa)、シフトアップに際したクラッチ切換の所要時間として予測時間Tを設定し、その予測時間T後のエンジン回転速度Neがエンジンのトルク制限域の下限よりも低回転側に設定された上限回転閾値Ne0に達しない間は次変速段へのシフトアップを禁止し(期間b)、予測時間T後のエンジン回転速度Neが上限回転閾値Ne0に達するときには次変速段へのシフトアップを許可する(ポイントc)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】第1締結要素を解放する際に、第2締結要素の発熱量を抑制しつつ、エンジンの吹き上がりを抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEを駆動しつつ、第1締結要素CL1を締結し、第2締結要素CL2をスリップ制御している状態から、第1締結要素CL1を解放する際に、目標エンジントルクが設定値以下となってから第1締結要素CL1を解放するまでの待ち時間を、第2締結要素CL2の温度が高いほどおよび/または目標駆動トルクが大きいほど短く設定するようにした。
(もっと読む)
車両の制御装置
【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
車両、その制御装置およびその制御方法
【課題】ECVTおよびアイドルスピードコントロール装置を備えた車両において、ドライバビリティを向上する。
【解決手段】自動二輪車1は、駆動輪としての後輪3と、エンジン10と、変速装置20と、遠心クラッチ25と、アイドルスピードコントロール装置9と、ECU7と、を備えている。変速装置20は、入力軸としてのクランク軸11と、出力軸22a1とを有する。遠心クラッチ25は、出力軸22a1と後輪3との間に配置されている。遠心クラッチ25は、出力軸22a1の回転速度に応じて断続される。アイドルスピードコントロール装置9は、エンジン10のアイドル回転速度を調節するアイドルスピードコントロールを行う。ECU7は、変速装置20の異常を検出し、変速装置20に異常が生じた際にアイドルスピードコントロールを抑制または停止させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
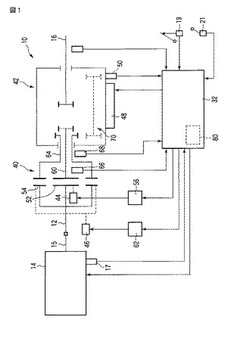
車両制御装置
【課題】アイドリングストップアンドスタート制御時において、クラッチ機構への負荷を軽減することができる車両制御装置を提供する。
【解決手段】エンジンと、エンジンの動力が入力されるプライマリプーリと、エンジンの動力を駆動輪へ向けて出力するセカンダリプーリと、ベルトとを有するベルト式無段変速機と、エンジンの動力により、ベルト式無段変速機にオイルを供給可能な機械オイルポンプ24と、プライマリ油圧室58における油圧を制御可能な供給側および排出側油圧制御弁81a,81bと、セカンダリ油圧室63へ向けてオイルを供給可能なアキュムレータ73と、を備えた車両のECU14であって、車両の停止時においてエンジンを停止させる一方で、車両の発進時においてエンジンを始動させるアイドリングストップアンドスタート制御の実行時に、アキュムレータ73を作動させ、供給側および排出側油圧制御弁81a,81bを閉弁させる。
(もっと読む)
ハイブリッド車両のモード切り替え制御装置
【課題】電気走行モードからハイブリッド走行モードへの切り替え時におけるエンジン始動後に第2クラッチを、ショック無しにスリップ状態から締結状態に切り替える。
【解決手段】t2にアクセル開度APOの増大を受けてエンジン始動が開始され、これに呼応したクランキングによりエンジン回転数NeおよびエンジントルクTeが増大する場合に、t5に第2クラッチCL2のスリップ回転がHEV移行許可スリップ回転以下になり、更にt6に車速がHEV移行許可車速以上になっても、始動後のエンジントルクTeが安定してハイブリッド走行モード移行許可トルクになるt7までは、第2クラッチCL2をスリップ締結状態に保って完全締結状態への状態切り替えを遅延させ、t7に至ってはじめてこの状態切り替えを実行することによりHEVモードへの移行を行う。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】1つの電磁弁によって所定の油圧式摩擦係合要素およびロックアップ機構を選択的に制御できる油圧制御回路を備え、ロックアップクラッチのロックアップ開始を早めることができる動力伝達装置の制御装置を提供する。
【解決手段】前進用クラッチC1にモジュレータ圧PLPMが供給される期間と、ロックアップ開始に備えてリニアソレノイドバルブSLUの制御圧PSLUを低下させる制御が実行される期間とが少なくとも一部重複されるため、その重複した期間分だけリニアソレノイドバルブSLUの制御圧PSLUの低下開始が早められるに従い、ロックアップクラッチ26のロックアップ開始を早めることができる。
(もっと読む)
トルクコンバータのタービン速度推定装置
【課題】自動変速機内の前後進切替機構の作動状況によりタービン回転速度に変化が生じる場合であっても、トルコンのタービン回転速度を推定することができるようにする。
【解決手段】エンジン2と自動変速機4の前後進切替機構44との間に介装されたトルクコンバータ6のタービン速度を推定する装置であって、湿式多板クラッチ装置52を断接するときの作動油の油圧Pを推定する油圧推定手段12と、この油圧推定手段12により推定された作動油の油圧Pに基づいて湿式多板クラッチ装置52の係合トルクTCLTを推定する係合トルク推定手段14と、この係合トルク推定手段14により推定された係合トルクTCLTと、クランク角センサ20aにより検出されたエンジン2の回転速度Neとに基づいて、トルクコンバータ6のタービン回転速度Ntを算出するタービン回転速度演算算手段16と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン停止制御時、差動許容機構を有さない直列接続駆動系でありながら、エンジン再始動時の排気浄化効率の維持と、車速低下の抑制と、燃費の向上と、を併せて達成すること。
【解決手段】駆動系に、エンジンEng、第1クラッチCL1、モータ/ジェネレータMG、第2クラッチCL2、左右タイヤLT,RTを備え、エンジンEngを停止させる際、第1クラッチCL1を締結状態でエンジンEngへの燃料噴射を継続したままでエンジン回転数を低下させ、エンジン回転数N1が所定回転数N2まで低下した段階でエンジンEngへの燃料噴射を停止する。このハイブリッド車両において、エンジン停止制御手段(図4,図5)は、モータ/ジェネレータMGによりエンジン回転数N1を低下させる際、自動変速機CVTをハイ側に変速させ、ハイ側への変速に制限がかかったとき、第2クラッチCL2をスリップ締結状態とする。
(もっと読む)
車両用駆動装置の制御装置
【課題】電動モータによる内燃機関始動時の応答遅れを抑制可能な車両用駆動装置を提供する。
【解決手段】車両用駆動装置1の電機制御ユニット5は、第1変速部を介して所定の変速ギヤ段でEV走行中に電動モータ7の動力でエンジン6を始動するとき、第1変速部における現在の変速ギヤ段より1段高い第2変速部における変速ギヤ段を介してエンジン6の始動が可能か否かのみを判定し、第1変速部における現在の変速ギヤ段より1段高い第2変速部における変速ギヤ段を介してエンジン6の始動が可能な場合に、第2クラッチ42を締結して第2変速部における変速ギヤ段を介してエンジン6を始動する。
(もっと読む)
無段変速機用油圧制御装置
【課題】学習制御の際に特別な油圧の調整を必要とせず、燃費の悪化を招くことなく学習制御を実施可能であって、シンプルな装置構成や制御プログラムにより構成可能な無段変速機用油圧制御装置の提供を目的とした。
【解決手段】油圧制御装置CPは、車両Aが停車中にアイドルアップ運転を実施した際にエンジンの回転数が所定の閾値以上に到達し、更にその状態が所定期間以上に亘って継続した状態において、高圧域内あるいは中圧域内の所定の目標挟圧に設定してVベルト15に挟圧を作用させる。油圧制御装置CPは、この状態において実際にVベルト15に作用している実挟圧と目標挟圧との差異を確認し、目標挟圧と実挟圧との対応を学習する。
(もっと読む)
エンジン始動制御装置
【課題】車両の運転時にエンジンを停止することによる燃費の向上と、エンジンの停止後の再始動時における始動性の確保とを両立することのできるエンジン始動制御装置を提供すること。
【解決手段】車両1の運転時にエンジン4を停止させた後、エンジン4の再始動の制御を行うことのできるエンジン4の始動制御装置70に、車両1の走行時の動力源であるエンジン4の始動性を判定する始動性判定部88と、エンジン4で発生した動力を駆動輪28側に伝達する際に係合する摩擦係合要素22の係合力を制御可能に設けられると共に、エンジン4の始動時に、始動性判定部88で判定したエンジン4の始動性に基づいて摩擦係合要素22の係合力の調節を行う係合力制御手段である変速制御部92と、を備える。
(もっと読む)
161 - 180 / 1,574
[ Back to top ]