
Fターム[3J552VD07]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 運転者情報,操作情報 (2,942) | アクセル操作 (1,839) | 操作速度 (114)
Fターム[3J552VD07]の下位に属するFターム
戻し (17)
Fターム[3J552VD07]に分類される特許
1 - 20 / 97
自動変速機
【課題】ビジーシフトの発生を抑制するとともに、変速回数を低減しクラッチ機構やシフト機構の負荷を低減することが可能な自動変速機を提供することを目的とする。
【解決手段】自動変速機1は、シフト機構70a〜70dを動作させるとともに、変速指令が送出されるとクラッチ機構30の係合状態を切り換えて変速指令に応じた変速制御を実行する変速制御装置80を備える。変速制御装置80は、変速指令が送出された際に、当該変速指令に応じた変速制御に要するシフト時間Psと現在から次回の変速指令が送出されるまでの次指令時間Pnとを算出し、シフト時間Psが次指令時間Pnよりも長い場合には待機時間Pwだけ変速制御の実行を待機する。
(もっと読む)
自動変速機の変速制御装置

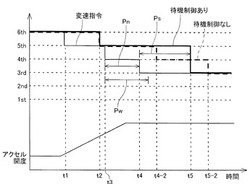
【課題】モータ伝動系の自動変速機が、アクセルペダルおよびブレーキペダル間の踏み替えによっても、反復変速を行うことのないようにする。
【解決手段】t1より、アクセルペダル釈放操作(アクセルペダルストローク量STaccの0への低下)によりモータトルクを0に向け低下させる間、t2に、目標変速段が高速段となり、トルク低下に伴うアップシフト変速要求が発生する。しかし、この変速要求を、t2から遅延時間TMsが経過するt3まで実行せず、t3に至ってはじめて当該変速要求を実行し、自動変速機を現在の低速段選択状態からから高速段へとアップシフトさせる。よって、トルク低下(アクセルペダル釈放)応答のアップシフト変速要求瞬時t2の直後(t2〜t3)に、ブレーキ操作によるモータ回生トルクの増大要求があっても、これに呼応した変速が発生せず、低速段→高速段→低速段の反復変速が短時間のうちに発生するのを回避可能である。
(もっと読む)
トロイダル型無段変速機及び無段変速装置
【課題】急加速時等の動力の急変動時にも、この動力を伝達するトラクション部(転がり接触部)で適切な押し付け力を付与できる構造を実現する。
【解決手段】動力の急変動時は、押圧装置に導入すべき油圧の目標値を、アクセル開度とエンジン回転速度とに基づいて設定し、この目標値に油圧を調節する。
(もっと読む)
トロイダル型無段変速機及び無段変速装置
【課題】急加速時等の動力の急変動時にも、この動力を伝達するトラクション部(転がり接触部)で適切な押し付け力を付与できる構造を実現する。
【解決手段】動力の急変動時は、押圧装置に導入すべき油圧の目標値を、アクセル開度とエンジン回転速度とに基づいて設定し、この目標値に油圧を調節する。
(もっと読む)
車両用駆動システム
【課題】車両走行中かつエンジン休止中におけるエンジン始動制御にて速やかな加速を実現できる車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、エンジン2と、変速機4と、エンジン2および変速機4の間に配置されるクラッチ3とを備える。また、車両用駆動システム1は、アクセル開度θを取得するアクセル開度センサ724と、加速要求取得手段の出力信号に基づいてエンジン2、変速機4およびクラッチ3を駆動制御する制御装置7とを備える。そして、制御装置7は、車両走行中かつ内燃機関2の休止中にて、ドライバの加速要求が所定の閾値以上となったことを契機として変速機4の変速段をニュートラルから前進段に変更すると共に、エンジン2を始動してクラッチ3を係合状態とする。
(もっと読む)
車両の駆動力制御装置
【課題】マニュアル変速モードにおいて、ドライバの選択した変速段を所定に維持しつつ、必要に応じてドライバの意思に合致した違和感のない自動変速を行うことができる車両の駆動力制御装置を提供する。
【解決手段】T/M_ECU20は、プライマリ回転数Npがキックダウン許可回転数Nth以下であり、且つ、アクセルペダル踏込量θaccがキックダウン許可踏込量θaccth以上である場合には、マニュアル変速モードの選択時においても、ドライバのアクセル操作から加速意思を判断して変速段を低速段側にキックダウンさせる。この場合において、駆動力特性のモードM毎にキックダウン許可回転数Nthを異ならせ、プライマリ回転数Npに基づいてキックダウンの自動実行を許可する回転数領域を、アクセル操作に対する応答性が高いモードMであるほど狭い領域に設定する。
(もっと読む)
車両の制御装置
【課題】アクセルペダルの急な踏み離し操作等によるアップシフト側の変速の際には、変速に伴う回転速度の低下に対して、実回転速度に対する機関圧縮比の応答遅れを抑制・回避することができる制御装置を提供する。
【解決手段】通常の運転状態では、現在の実回転速度に基づいて目標負荷追従圧縮比を算出し、これを目標圧縮比として設定し、この目標圧縮比へ向けて可変圧縮比機構を駆動制御する。但し、車両運転者により操作されるアクセル開度APOに基づいて、変速機の変速比が大から小へと変速されるアップシフトを予測したときには、アクセル開度APO等に基づいて変速後の予測変速比を予測し、この予測変速比に基づいて変速後のエンジンの予測回転速度を算出し、この予測回転速度等に基づいて目標瞬時圧縮比を算出し、これを目標圧縮比として設定する。
(もっと読む)
エンジン自動停止車両及びその制御方法
【課題】エンジン停止制御による燃費の向上効果を高める。
【解決手段】コントローラは、アイドルストップ条件又はコーストストップ条件が成立した時、電動オイルポンプを作動させ(S12、S14)、その後上記アイドルストップ条件及びコーストストップ条件が非成立となっても、車両の加速状態又は運転者の加速意図が判定されるまでは、電動オイルポンプを停止させることなく作動を継続させる(S15、S16、S17、S18)。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択方法
【課題】自動車の惰行段階後の牽引段階に対する自動変速機用の改善されたギア選択方法および改善されたギア選択装置を提供する。
【解決手段】本発明は、自動車の惰行段階(S)後の牽引段階(Z2)に対する自動変速機用のギア選択方法および装置に関する。本発明による方法では、惰行段階(S)の前の牽引段階(Z1)において、回転速度レベル(n)および、若しくはまたは牽引力レベル(Fx)の移動平均値が、特定の速度(v)および特定の勾配(ST)に応じて形成され、そして、その移動平均が特定の惰行段階(S)の後の牽引段階(Z2)に対する自動変速機の少なくとも1つの選択ギアを決定するために考慮される。
(もっと読む)
ツインクラッチ式変速機
【課題】ツインクラッチのタッチポイントを学習により正確に把握してツインクラッチの切替時の変速ショックをなくす。
【解決手段】シンクロクラッチS1〜S4によりプリシフトした状態で第1、第2クラッチCL1,CL2を切り替えることでエンジンEからの駆動力を振り分けて駆動力を出力軸3に伝達可能な外駆動軸13、最外駆動軸15を備え、第1、第2クラッチCL1,CL2とシンクロクラッチS1〜S4を制御するマネージメントECU8を備えたツインクラッチ式変速機において、マネージメントECU8は第2クラッチCL2の容量を変化させる際のクラッチ指令値と、第2クラッチCL2が接状態となることにより動力が伝達される最外駆動軸15の回転数との関係に基づいて、第2クラッチCL2が滑り始めて接状態となるタイミングであるタッチポイントに対応した指令値を学習し、この学習した指令値を加味して第2クラッチCL2を制御する。
(もっと読む)
車両制御装置
【課題】より適切な変速制御を行い、所望の加速度を発生させることのできる車両制御装置を提供すること。
【解決手段】アクセルペダル20の操作速度が所定の操作速度よりも速い場合には、現在のギア段よりも低速側のギア段への変速時に選択するギア段を制限するので、アクセルペダル20の操作速度が速い場合に、通常の操作速度で操作する場合とは異なる加速度が要求される場合でも、より確実に要求加速度を実現できるギア段に変速することができる。この結果、より適切な変速制御を行い、所望の加速度を発生させることができる。
(もっと読む)
自発的な燃料/ペダルオフ時の自動車の自動変速機を制御する方法
【課題】自発的な燃料/ペダルオフ(ファストオフ)時の自動車の自動変速機を制御する方法を提供する。
【解決手段】自動変速機は加速ペダルを介して影響を受ける内燃機関によって駆動され、ペダル位置に比例した信号がシフトマップを内蔵する電子式変速機制御装置へ送られ、ペダル位置グラジエント(PSTG)がペダル位置グラジエント限界値(KF_PSTG)よりも小である場合に自発的な燃料/ペダルオフ(ファストオフ)が認識されてアップシフトブロック(FFO=1)が実行される。アップシフトブロック(FFO=1)の状態は、エンジン回転数(NMO)と等価の関数として設定されたトラクション・エンジンブレーキ特性曲線(KL_ZS)を実際のエンジンモーメント(MMM)が上回った場合に、トラクション運転を認識するのに伴い、全走行抵抗(GFW)に関連した車加速度/減速度及びペダル位置グラジエント限界値に関連して解消される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動要求と変速要求が異なるタイミングにより続けて発生するシーンにおいて、エンジン始動処理と変速処理の時間短縮化と、2つの処理進行を適切に管理することによる運転性の向上と、の両立を図ること。
【解決手段】駆動系に、エンジンEngとモータ/ジェネレータMGと自動変速機ATを備え、エンジンEngは、エンジン停止モードのときにエンジン始動要求があるとエンジン始動処理を行い、自動変速機ATは、現変速段とは異なる変速段への変速要求があると変速処理を行う。このFRハイブリッド車両において、エンジン始動要求か変速要求のどちらか一方の要求があったとき、他方の要求が判定時間内になされるか否かを予測判定する始動変速要求予測判定手段(図10,図12)と、他方の要求が判定時間内になされると予測判定したとき、他方の要求を強制的に発生させて、エンジン始動と変速とを同時に処理する始動変速同時制御手段(図11,図13)と、を有する。
(もっと読む)
電動車両の制御装置
【課題】走行シーンに応じて駆動力制御と変速制御の間で適切に優先付けすることで、走行シーンにかかわらずシステム保護と運転性向上のバランスを図ることができる電動車両の制御装置を提供すること。
【解決手段】電動機を含む複数の動力源と、電気無段変速機10と、摩擦クラッチ7を有する機械有段変速機6と、駆動力制御手段と、機械有段変速機6の変速制御手段と、を備えている。このハイブリッド車両において、駆動力の増減情報と車速の増減情報を取得し、駆動力指令と変速指令の同時出力時であり、かつ、駆動力と車速のうち少なくとも一方が増加する場合、駆動力制御より変速制御を優先する制御を行い、駆動力指令と変速指令の同時出力時であり、かつ、駆動力と車速のうち少なくとも一方が減少する場合、変速制御より駆動力制御を優先する制御を行う駆動力/変速協調制御手段を設けた。
(もっと読む)
自動変速機の制御装置
【課題】変速に要する時間を短くする。
【解決手段】ECUは、係合するクラッチおよびブレーキの組み合わせに応じたギヤ段が形成されるトランスミッションを、6速ギヤ段から3速ギヤ段へダウンシフトする場合にはC2クラッチおよびB1ブレーキ、5速ギヤ段から2速ギヤ段へダウンシフトする場合にはC2クラッチおよびB3ブレーキの解放を開始するステップ(S200)と、C2クラッチおよびB1ブレーキのうちの少なくともいずれか一方、もしくはC2クラッチおよびB3ブレーキのうちの少なくともいずれか一方が完全に解放されると(S210にてYES)、6速ギヤ段から3速ギヤ段へダウンシフトする場合にはC1クラッチおよびB3ブレーキ、5速ギヤ段から2速ギヤ段へダウンシフトする場合にはC1クラッチおよびB1ブレーキの係合を開始するステップ(S220)とを含む、プログラムを実行する。
(もっと読む)
変速操作装置
【課題】ツインクラッチ等を用いずに運転者の違和感を抑制することを可能とする。
【解決手段】複数段の歯車組からなりカップリング・スリーブ3,5,・・の移動による結合を介し変速を行なわせるマニュアル・トランスミッション1と、カップリング・スリーブ3,5,・・を移動させるシフト・モータ23、セレクト・モータ25とを備えた変速操作装置2において、エンジン回転を制御するアクセル・ペダル102の操作を検出するアクセル・センサ100と、アクセル・センサ100の検出信号に基づきアクセル・ペダル102の特定の操作態様に応じてシフト・モータ23、セレクト・モータ25を動作させる変速コントローラ26とを備えたことを特徴とする。
(もっと読む)
車両の制御装置
【課題】運転者に違和感を与えるのを抑制しつつ好適に電子スロットル弁の特性を設定できる車両の制御装置を提供する。
【解決手段】自動変速機16の変速に際して、アクセル開度ACCの変化量ΔACCが予め定められた閾値A0より小さい場合には、変速前の変速段に対応する特性を維持する一方、アクセル開度ACCの変化量ΔACCがその閾値A0より大きい場合には、変速後の変速段に対応する特性へと移行するものであることから、変速に際して電子スロットル弁24の特性が変化することにより運転者の意図しない加減速が発生するのを好適に抑制することができる。すなわち、運転者に違和感を与えるのを抑制しつつ好適に電子スロットル弁24の特性を設定できる車両の制御装置を提供することができる。
(もっと読む)
無段変速機及びその制御方法
【課題】副変速機構の変速条件を適正化し、副変速機構の変速が繰り返し行われるのを防止する。
【解決手段】変速機コントローラ12は、アクセルペダルが所定開度以上まで踏み込まれたときのみ、副変速機構30の変速段を2速から1速に変更する2−1変速を許可し、実スルー変速比が前記モード切換変速比をHigh側からLow側に跨いで変化したときは、副変速機構30の2−1変速が許可されているときのみ、副変速機構30の変速段を2速から1速に変更する。
(もっと読む)
車両用駆動装置
【課題】駆動力源の切換制御と変速制御とが重複する同時切換が生じる場合に、運転者の出力要求量の変化に対する駆動力変化の応答性の悪化を抑制しつつ、同時切換に起因してショックが発生することを防止する。
【解決手段】アクセル操作変化率Δθacc が正の所定値A以上の加速要求時に、駆動力源切換制御と変速制御とが重複する同時切換になるか否かを予測し(S1〜S3)、同時切換になることが予測されると、駆動力源切換マップのM→E切換線に従う本来の駆動力源切換に先立って、モータ走行からエンジン走行に切り換えるためにエンジン10の始動制御を開始する(S4)。このため、駆動力源の切換制御と変速制御とがずれて実施されるようになり、同時切換に起因するショックの発生が抑制されるとともに、エンジン走行への切換制御を本来の制御開始よりも先行して実施するため、運転者の加速要求に対する駆動力変化の応答性が向上する。
(もっと読む)
1 - 20 / 97
[ Back to top ]