
自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択方法
【課題】自動車の惰行段階後の牽引段階に対する自動変速機用の改善されたギア選択方法および改善されたギア選択装置を提供する。
【解決手段】本発明は、自動車の惰行段階(S)後の牽引段階(Z2)に対する自動変速機用のギア選択方法および装置に関する。本発明による方法では、惰行段階(S)の前の牽引段階(Z1)において、回転速度レベル(n)および、若しくはまたは牽引力レベル(Fx)の移動平均値が、特定の速度(v)および特定の勾配(ST)に応じて形成され、そして、その移動平均が特定の惰行段階(S)の後の牽引段階(Z2)に対する自動変速機の少なくとも1つの選択ギアを決定するために考慮される。
【解決手段】本発明は、自動車の惰行段階(S)後の牽引段階(Z2)に対する自動変速機用のギア選択方法および装置に関する。本発明による方法では、惰行段階(S)の前の牽引段階(Z1)において、回転速度レベル(n)および、若しくはまたは牽引力レベル(Fx)の移動平均値が、特定の速度(v)および特定の勾配(ST)に応じて形成され、そして、その移動平均が特定の惰行段階(S)の後の牽引段階(Z2)に対する自動変速機の少なくとも1つの選択ギアを決定するために考慮される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択方法に関する。
【背景技術】
【0002】
より環境に配慮した自動車を使用するために、従来の内燃機関に対するさまざまな代替物、たとえばハイブリッド駆動装置の使用が知られている。
【0003】
消費を低減するさらなるオプションは、「惰性走行(free−wheeling)機能」とも呼ばれるいわゆる「惰行機能」であり、それは、所定運転状態においてエネルギー消費を低減するために、駆動装置の電源を切り、自動変速機をニュートラル位置にシフトさせるかまたはクラッチを開放することによって、使用される。
【0004】
従来の惰行運転の方策では、以下の手法が採られていた。第1の方策では、惰行の前の牽引段階からのギアを保持していた。スポーティな運転モード、すなわちローギアでは、回転速度の急上昇が発生する可能性があり、それは、速度を上昇させて下り坂を運転している時に、選択されたギアが低すぎるためである。さらに、長い惰行段階の後および定常運転の後に、ギアがすでに適当でない場合があり、それにより、より高い加速が必要になる。その場合、ギアは高すぎ、すなわち、牽引力が低すぎ、再シフトが必要になる。第2の方策では、あり得る最高ギアを噛合させる。そのギアは、通常、スポーティな運転モードには適していない。それは高すぎ、すなわち牽引力が低すぎ、したがって、再シフトが必要である。第3の方策は、変速機のスポーティな要素を考慮して、通常のシフトプログラム後のギアの追跡を予測する。これは、アクセルペダル値が0を上回る惰行中では可能であるが、ギア選択は妥当ではないことが多い。アクセルペダル値が0である惰行中、シフトプログラムは適切ではない。
【0005】
特許文献1は、変速機を制御しかつ、若しくはまたは調節する方法を記載しており、そこでは、「惰行機能アクティブ」動作状態において、シフトアップを防止する手段の作動を停止させることができる。惰行動作中の記載されているシフトアップの方策は、惰行機能が終了した後、事前確定可能なシフト特性を選択することができることを示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】独国特許出願公開第10327438A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
したがって、本発明の目的は、自動車の惰行段階後の牽引段階に対する自動変速機用の改善されたギア選択方法および改善されたギア選択装置を提供することであり、この方法および装置は、運転者の動的方策に対して優れた適合性を可能にする。
【課題を解決するための手段】
【0008】
自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法には、請求項1および請求項12に定義されているように、来たるべき牽引段階に対し、特定の惰行段階の前の牽引段階において、運転者の動的要求を考慮するという利点がある。
【0009】
本発明が基づく概念は、惰行段階の前の牽引段階において、回転速度レベルおよび、若しくはまたは牽引力レベルの移動平均値が、特定の速度および特定の勾配に応じて形成され、かつ特定の惰行段階の後の牽引段階に対する自動変速機の少なくとも1つの選択ギアを決定するために考慮される、ということにある。
【0010】
本発明による方法の有利な発展形態および改良形態は、従属請求項に示されている。
【0011】
好ましい発展形態によれば、運転者の回転速度要求が、惰行段階の最後における現速度および現勾配に対する回転速度レベルの移動平均値を考慮して決定され、それに基づいて、対応する選択ギアが決定される。
【0012】
別の好ましい発展形態によれば、運転者の牽引力要求が、惰行段階の最後における現速度および現勾配に対する牽引力レベルの移動平均値を考慮して決定され、その後、牽引力要求は、対応する回転速度および,またはエンジントルク要求に変換され、それに基づいて、対応する選択ギアが決定される。
【0013】
別の好ましい発展形態によれば、運転者の回転速度要求が、惰行段階の最後における現速度および現勾配に対する回転速度レベルの移動平均値を考慮して決定され、それに基づいて、対応する第1選択ギアおよび第2選択ギアが決定され、第1選択ギアは、移動平均によって確定された値を上回る回転速度要求に対応し、第2選択ギアは、移動平均によって確定された値を下回る回転速度要求に対応する。
【0014】
別の好ましい発展形態によれば、運転者の牽引力要求が、惰行段階の最後における現速度および現勾配に対する牽引力レベルの移動平均値を考慮して決定され、牽引力要求は、対応する回転速度要求に変換され、それに基づいて、対応する第1選択ギアおよび第2選択ギアが決定され、第1選択ギアは、移動平均によって確定された値を上回る牽引力要求に対応し、第2選択ギアは、移動平均によって確定された値を下回る牽引力要求に対応する。
【0015】
別の好ましい発展形態によれば、特定の惰行段階の最後の時点で、現アクセルペダル作動値および、若しくはまたは現アクセルペダル作動勾配の確定が行われ、それに応じて、少なくとも1つの決定された選択ギアが適合される。この場合、記憶されたデータから定義された方法で重み付けされた、回転速度要求および牽引力要求を、惰行段階の最後における回転速度および牽引力に対する値の確定に使用することができる。
【0016】
別の好ましい発展形態によれば、自動変速機は、決定された選択ギアの事前噛合を可能にせず、選択ギアは、惰行段階の最後に噛合し、惰行段階の最後における回転速度が同期し、その後、摩擦接続が確立される。
【0017】
別の好ましい発展形態によれば、自動変速機は、単一の決定された選択ギアの事前噛合を可能とし、選択ギアは惰行段階の間に噛合し、惰行段階の最後における回転速度が同期し、その後、摩擦接続が確立される。
【0018】
別の好ましい発展形態によれば、自動変速機は、2つの決定された選択ギアの事前噛合を可能とし、第1選択ギアおよび第2選択ギアは惰行段階の間に噛合し、事前決定された基準に従って優先順位が付けられている、第1選択ギアおよび第2選択ギアからのギアが、惰行段階の最後において、最終的な選択ギアとして決定され、惰行段階の最後における回転速度が同期し、その後、摩擦接続が確立される。
【0019】
別の好ましい発展形態によれば、回転速度レベルおよび、若しくはまたは牽引力レベルの移動平均値が形成される時間窓は、少なくとも1つの運転パラメータに応じて可変である。
【0020】
本発明の例示的な実施形態を図面に示し、以下の説明においてより詳細に説明する。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態による、自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択装置のブロック図を示す。
【図2】図1による自動車の惰行段階後の牽引段階に対する自動変速機のギア選択装置の機能を説明するルートプロファイルの例示的な図を示す。
【図3】自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法の一実施形態を説明するフローチャートを示す。
【図4】自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法の別の実施形態を説明するフローチャートを示す。
【図5】自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法のさらに別の実施形態を説明するフローチャートを示す。
【発明を実施するための形態】
【0022】
図において、同じ参照符号は、同一のまたは機能的に同一の要素を指す。
【0023】
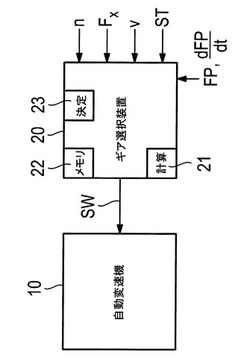
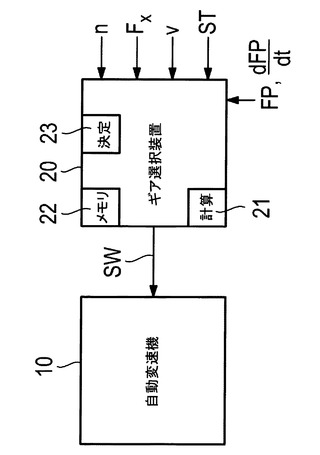
図1は、本発明の一実施形態による、自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択装置のブロック図を示す。
【0024】
図1において、参照符号10は、自動変速機を示し、それを、自動変速機用のギア選択装置20のシフト信号SWによってシフトさせることができる。装置20は、運動パラメータ、すなわち回転速度n、牽引力Fx、速度v、勾配STならびにアクセスペダル作動値FPおよびアクセスペダル作動勾配dFP/dtを受け取るように設計されている。
【0025】
装置20は計算装置21を有し、それにより、惰行段階Sの前の牽引段階Z1において、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値を、特定の速度vおよび特定の勾配STに応じて形成することができる。メモリ装置22が、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値を記憶する役割を果たす。
【0026】
惰行段階Sの間の回転速度nおよび、若しくはまたは牽引力レベルFxの移動平均値に基づいて、決定装置23が、後続する牽引段階Z2に対する自動変速機10の少なくとも1つの選択ギアを決定する。
【0027】
牽引段階Z2の開始時に、現アクセルペダル作動値FPおよび、若しくはまたは現アクセルペダル作動勾配dFP/dtが直接確定されることが好ましく、必要な場合は、決定装置23によって事前に決定された選択ギアが適合される。
【0028】
言い換えれば、選択ギアには、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値によって表される履歴のみでなく、アクセルペダル作動値FPおよび、若しくはまたはアクセスペダル作動勾配dFP/dtによって表される、惰行段階の最後における運転者の現動的要求も反映される。
【0029】
惰行段階Sの間のアクセルペダル作動値FPおよび、若しくはまたはアクセスペダル作動勾配dFP/dtによって解釈される動的要求が変化しなかった場合、たとえば、先に決定された選択ギアに対して変更はない。対応する変化が発生した場合、所定の適合基準に従って対応する選択ギアの変更が適切に行われる。
【0030】
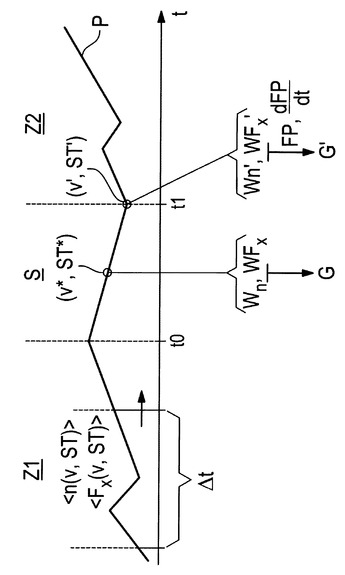
図2は、図1による自動車の惰行段階後の牽引段階に対する自動変速機のギア選択装置の機能を説明するルートプロファイルの例示的な図を示す。
【0031】
図2において、参照符号Pは、運転時間tに応じた勾配STを含むルートプロファイルを示し、勾配は、簡単にする理由で区分において一定であるものとする。
【0032】
牽引段階Z1の間、それぞれ現速度vおよび現勾配STに応じて、回転速度レベルの移動平均値<n(v、ST)>が形成される。移動平均の対応する時間間隔を、△tによって示す。同様に、別の方法としてまたは追加の方法として、それぞれの速度vおよび勾配STに応じて、牽引力の移動平均値<Fx(v、ST)>が形成される。
【0033】
時刻t0において、惰行段階Sが開始し、その間、自動車の駆動装置は電源が切られるかまたは段階的に空転状態になり、自動変速機10は、設計に応じて、ニュートラル位置になるかまたはトルク伝達クラッチの開放によって切離し状態になる。本例において分かるように、惰行段階は、下り坂を走行中に負の勾配STで発生する。惰行段階Sの間、現速度v*および現勾配ST*に応じて、かつ現速度v*および現勾配ST*に対する回転速度レベルnの記憶された移動平均値を考慮して、運転者の回転速度要求Wnが形成され、勾配ST*および、若しくはまたは速度v*が変化するに従って常に変更される。
【0034】
同様に、牽引力レベルFxの記憶された移動平均値を考慮して、瞬間速度v*および瞬間勾配ST*に対応して、運転者の牽引力要求WFxが形成される。前記回転速度要求Wnおよび、若しくはまたは牽引力要求Fxから、少なくとも1つの選択ギアGが確定される。任意に、複数の選択ギアを確定しそれらに対し適切に優先順位を与えることもさらに可能である(図5を参照)。
【0035】
回転速度要求Wnおよび牽引力要求WFxを連続して適合させることにより、選択ギアもまたそれに応じて変更される。惰行段階Sの最後において、現速度v’および現勾配ST’は時刻t1の時点である。そこから、回転速度要求Wn’および、若しくはまたは牽引力要求WFx’を同様に導出することができる。惰行段階が非常に短い場合、または(FPおよび、若しくはまたはdPF/dtから)惰行段階の最後における新たに解釈された運転者の要求が記憶されたデータに対応する場合、履歴から確定される前記選択ギアGを、最終的な選択ギアとして即座に決定することができ、先のギア選択によって先だって未だ行われていなかった場合自動変速機10をそれに応じてシフトさせることができる。
【0036】
しかしながら、惰行段階Sの間、アクセスペダル作動値FPおよび、若しくはまたはアクセルペダル作動勾配dFP/dTは規則的に変化することになり、したがって、最終的な選択ギアG’に達するために対応する適合が必要になる。
【0037】
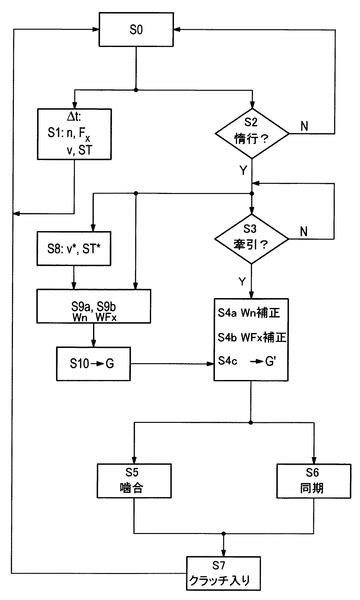
図3は、自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法の一実施形態を説明するフローチャートを示す。
【0038】
図3による本発明による方法の実施形態では、決定された選択ギアを、自動変速機10において事前に噛合させることができない。
【0039】
プログラムはステップS0で開始する。ステップS1において、所定時間間隔t△に対するそれぞれ現速度vおよびそれぞれ現勾配STに応じて、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値を形成する。時間間隔△tの長さは、少なくとも1つの運転パラメータ、たとえば運転速度vに応じて可変であり得る。前記ステップS1は、言わば無限ループで実行する。前記時間間隔を、他の惰行段階も含めることができる長さであるように選択することができる。ステップS2において、惰行段階がアクティブであるか否かを検査する。アクティブでない場合、方法はステップS0に戻る。
【0040】
惰行段階が起動されている場合、方法はステップS2からステップS8に分岐し、そこで、惰行段階における瞬間速度v*および瞬間勾配ST*を各々確定する。
【0041】
S1からの記憶されたデータ、瞬間速度v*および瞬間勾配ST*を参照して、ステップS9aにおいて、回転速度要求Wnを決定し、かつ、若しくはまたはステップS9bにおいて、牽引力要求WFxを決定する。
【0042】
ステップS10において、回転速度要求Wnおよび、若しくはまたは牽引力要求WFxに基づいて、少なくとも1つの選択ギアGを決定する。前記選択ギアGは、惰行段階Sの間の瞬間速度v*および、若しくはまたは勾配ST*に対応して連続的に適合される。
【0043】
同時に、ステップS3において、次の牽引段階(図2におけるZ2)への遷移が適切であるか否かを連続的に検査する。適切でない場合、方法は、戻って、無限ループでステップS8〜S10を実行する。
【0044】
ステップS3において、次の牽引段階への遷移が発生していることを認識した場合、ステップS4a、ステップS4b、ステップS4cを実行して、状況に関する要求を再評価する。
【0045】
詳細には、ステップS4aおよびステップS4bにおいて、現アクセルペダル作動値FPおよび、若しくはまたは現アクセルペダル作動勾配dFP/dTを確定し、それに基づいて、ステップS4aにおいて回転速度要求Wnを、かつ、若しくはまたはステップS4bにおいて牽引力要求WFxを補正する。この場合、記憶されたデータから定義された方法で重み付けされた、回転速度要求および牽引力要求を、惰行段階の最後における回転速度および牽引力に対する値の確定に使用することができる。前記新たな値が、ステップS9aおよびステップS9bにおいて決定された対応する値から逸脱している場合、ステップS10において決定された選択ギアGを、ステップS4cで決定された最終的な選択ギアG’に置き換える。
【0046】
その後、ステップS5において最終的な選択ギアG’を噛合させ、一方でステップS6において、エンジンの回転速度レベルnを、決定された最終的な選択ギアG’と同期させる。
【0047】
最後に、ステップS7において、クラッチを入れることにより摩擦接続を取得し、その後、方法はステップS0に戻り、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値の形成が継続するかまたは再度開始する。
【0048】
図4は、自動車の惰行段階の後の牽引段階に対する自動変速機用の本発明によるギア選択方法の別の実施形態を説明するフローチャートを示す。
【0049】
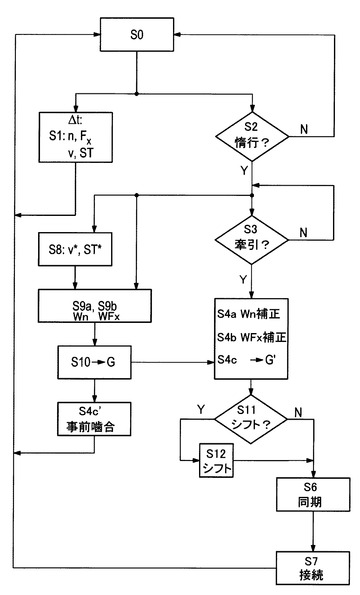
図4に示す実施形態では、自動変速機10において単一の決定された選択ギアGを事前に噛合させることが可能である。図3による本発明による方法の上記第1実施形態とは対照的に、これを、それぞれ現選択ギアGを決定するステップS10に直接隣接しているステップS4c’で行う。
【0050】
第2実施形態では、ステップS3において、来たるべき牽引段階への遷移が発生することを認識した場合、上述した実施形態と同様に、ステップS4aおよび、若しくはまたはステップS4bにおいて、回転速度要求Wnおよび、若しくはまたは牽引力要求WFxを再評価する。
【0051】
この場合、記憶されたデータから決定された方法で重み付けされた、回転速度要求および牽引力要求を、惰行段階の最後における回転速度および牽引力に対する値の確定に使用することができる。
【0052】
ステップS11において、ステップS4cからの結果に従ってシフト操作が必要であるか否かを検査する。シフト操作が必要でない場合、第1実施形態と同様に、ステップS6においてエンジンの回転速度を同期させ、ステップS7において、すでに選択されたギアにある変速機の摩擦接続をもたらす。
【0053】
シフト操作が必要である場合、それを、後に、ステップS6においてエンジンの回転速度nを同期させる前に、ステップS11の後にステップS12で行う。動的要求が下がった場合、シフト操作が必要である可能性が高く、その結果、より多くの時間を使用できる傾向があるように、要求ギアGを選択する。シフト時間の異なる変速機の場合、各場合においてギア変更に応じて、事前に噛合されるギアを選択することも可能であり、それにより、シフト時間の短いシフト操作のみが必要である傾向がある。
【0054】
第1実施形態と同様に、方法は、ステップS7の後にステップS0に戻る。
【0055】
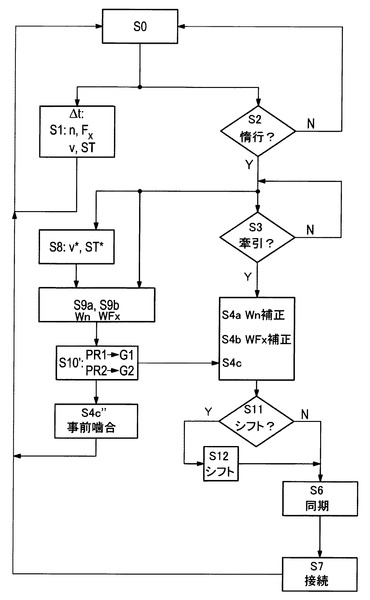
図5は、自動車の惰行段階の後の牽引段階に対する自動変速機用の本発明によるギア選択方法のさらに別の実施形態を説明するフローチャートを示す。
【0056】
本発明による方法の第3実施形態では、自動変速機10は、2つの決定された選択ギアG1、G2に事前に噛合させることができる。
【0057】
それに応じて、回転速度要求Wnおよび、若しくはまたは牽引力要求WFxを確定するステップS9a、ステップS9bの後に、ステップS10’で対応する高い方の第1優先度PR1および対応する低い方の第2優先度PR2をそれぞれ有する第1選択ギアG1および第2選択ギアG2を決定する。優先度PR1、PR2を、たとえば、スポーティな高い方のギアが優先されるように選択することができる。
【0058】
第1選択ギアG1は、移動平均によって確定された値を上回る回転速度要求および、若しくはまたは牽引力要求に対応し、第2選択ギアG2は、移動平均によって確定された値を下回る回転速度要求および、若しくはまたは牽引力要求に対応する。
【0059】
ステップS10’に続くステップS4’’において、2つの決定された選択ギアG1、G2を噛合させる。
【0060】
2つの上述した実施形態に類似して、ステップS3の検査により肯定的な結果が明らかとなる場合、ステップS4a、ステップS4bにおいて、回転速度要求Wnおよび、若しくはまたは牽引力要求WFxを再評価し、ステップS4cにおいて、選択ギアG1、G2を変更することができ、より高い優先度に従って、選択ギアのうちの1つを最終的に選択することができる。
【0061】
続くステップS11、ステップS12またはステップS6、ステップS7は、本発明の方法の第2実施形態に関してすでに上述したように、同様に進む。
【0062】
本発明を、好ましい例示的な実施形態に関して上述したが、本発明はそれに限定されず、さまざまな方法で変更することが可能である。
【符号の説明】
【0063】
S 惰行段階
Z1 牽引段階
Z2 牽引段階
n 回転速度レベル
Fx 牽引力レベル
v 速度
ST 勾配
【技術分野】
【0001】
本発明は、自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択方法に関する。
【背景技術】
【0002】
より環境に配慮した自動車を使用するために、従来の内燃機関に対するさまざまな代替物、たとえばハイブリッド駆動装置の使用が知られている。
【0003】
消費を低減するさらなるオプションは、「惰性走行(free−wheeling)機能」とも呼ばれるいわゆる「惰行機能」であり、それは、所定運転状態においてエネルギー消費を低減するために、駆動装置の電源を切り、自動変速機をニュートラル位置にシフトさせるかまたはクラッチを開放することによって、使用される。
【0004】
従来の惰行運転の方策では、以下の手法が採られていた。第1の方策では、惰行の前の牽引段階からのギアを保持していた。スポーティな運転モード、すなわちローギアでは、回転速度の急上昇が発生する可能性があり、それは、速度を上昇させて下り坂を運転している時に、選択されたギアが低すぎるためである。さらに、長い惰行段階の後および定常運転の後に、ギアがすでに適当でない場合があり、それにより、より高い加速が必要になる。その場合、ギアは高すぎ、すなわち、牽引力が低すぎ、再シフトが必要になる。第2の方策では、あり得る最高ギアを噛合させる。そのギアは、通常、スポーティな運転モードには適していない。それは高すぎ、すなわち牽引力が低すぎ、したがって、再シフトが必要である。第3の方策は、変速機のスポーティな要素を考慮して、通常のシフトプログラム後のギアの追跡を予測する。これは、アクセルペダル値が0を上回る惰行中では可能であるが、ギア選択は妥当ではないことが多い。アクセルペダル値が0である惰行中、シフトプログラムは適切ではない。
【0005】
特許文献1は、変速機を制御しかつ、若しくはまたは調節する方法を記載しており、そこでは、「惰行機能アクティブ」動作状態において、シフトアップを防止する手段の作動を停止させることができる。惰行動作中の記載されているシフトアップの方策は、惰行機能が終了した後、事前確定可能なシフト特性を選択することができることを示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】独国特許出願公開第10327438A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
したがって、本発明の目的は、自動車の惰行段階後の牽引段階に対する自動変速機用の改善されたギア選択方法および改善されたギア選択装置を提供することであり、この方法および装置は、運転者の動的方策に対して優れた適合性を可能にする。
【課題を解決するための手段】
【0008】
自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法には、請求項1および請求項12に定義されているように、来たるべき牽引段階に対し、特定の惰行段階の前の牽引段階において、運転者の動的要求を考慮するという利点がある。
【0009】
本発明が基づく概念は、惰行段階の前の牽引段階において、回転速度レベルおよび、若しくはまたは牽引力レベルの移動平均値が、特定の速度および特定の勾配に応じて形成され、かつ特定の惰行段階の後の牽引段階に対する自動変速機の少なくとも1つの選択ギアを決定するために考慮される、ということにある。
【0010】
本発明による方法の有利な発展形態および改良形態は、従属請求項に示されている。
【0011】
好ましい発展形態によれば、運転者の回転速度要求が、惰行段階の最後における現速度および現勾配に対する回転速度レベルの移動平均値を考慮して決定され、それに基づいて、対応する選択ギアが決定される。
【0012】
別の好ましい発展形態によれば、運転者の牽引力要求が、惰行段階の最後における現速度および現勾配に対する牽引力レベルの移動平均値を考慮して決定され、その後、牽引力要求は、対応する回転速度および,またはエンジントルク要求に変換され、それに基づいて、対応する選択ギアが決定される。
【0013】
別の好ましい発展形態によれば、運転者の回転速度要求が、惰行段階の最後における現速度および現勾配に対する回転速度レベルの移動平均値を考慮して決定され、それに基づいて、対応する第1選択ギアおよび第2選択ギアが決定され、第1選択ギアは、移動平均によって確定された値を上回る回転速度要求に対応し、第2選択ギアは、移動平均によって確定された値を下回る回転速度要求に対応する。
【0014】
別の好ましい発展形態によれば、運転者の牽引力要求が、惰行段階の最後における現速度および現勾配に対する牽引力レベルの移動平均値を考慮して決定され、牽引力要求は、対応する回転速度要求に変換され、それに基づいて、対応する第1選択ギアおよび第2選択ギアが決定され、第1選択ギアは、移動平均によって確定された値を上回る牽引力要求に対応し、第2選択ギアは、移動平均によって確定された値を下回る牽引力要求に対応する。
【0015】
別の好ましい発展形態によれば、特定の惰行段階の最後の時点で、現アクセルペダル作動値および、若しくはまたは現アクセルペダル作動勾配の確定が行われ、それに応じて、少なくとも1つの決定された選択ギアが適合される。この場合、記憶されたデータから定義された方法で重み付けされた、回転速度要求および牽引力要求を、惰行段階の最後における回転速度および牽引力に対する値の確定に使用することができる。
【0016】
別の好ましい発展形態によれば、自動変速機は、決定された選択ギアの事前噛合を可能にせず、選択ギアは、惰行段階の最後に噛合し、惰行段階の最後における回転速度が同期し、その後、摩擦接続が確立される。
【0017】
別の好ましい発展形態によれば、自動変速機は、単一の決定された選択ギアの事前噛合を可能とし、選択ギアは惰行段階の間に噛合し、惰行段階の最後における回転速度が同期し、その後、摩擦接続が確立される。
【0018】
別の好ましい発展形態によれば、自動変速機は、2つの決定された選択ギアの事前噛合を可能とし、第1選択ギアおよび第2選択ギアは惰行段階の間に噛合し、事前決定された基準に従って優先順位が付けられている、第1選択ギアおよび第2選択ギアからのギアが、惰行段階の最後において、最終的な選択ギアとして決定され、惰行段階の最後における回転速度が同期し、その後、摩擦接続が確立される。
【0019】
別の好ましい発展形態によれば、回転速度レベルおよび、若しくはまたは牽引力レベルの移動平均値が形成される時間窓は、少なくとも1つの運転パラメータに応じて可変である。
【0020】
本発明の例示的な実施形態を図面に示し、以下の説明においてより詳細に説明する。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態による、自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択装置のブロック図を示す。
【図2】図1による自動車の惰行段階後の牽引段階に対する自動変速機のギア選択装置の機能を説明するルートプロファイルの例示的な図を示す。
【図3】自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法の一実施形態を説明するフローチャートを示す。
【図4】自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法の別の実施形態を説明するフローチャートを示す。
【図5】自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法のさらに別の実施形態を説明するフローチャートを示す。
【発明を実施するための形態】
【0022】
図において、同じ参照符号は、同一のまたは機能的に同一の要素を指す。
【0023】
図1は、本発明の一実施形態による、自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択装置のブロック図を示す。
【0024】
図1において、参照符号10は、自動変速機を示し、それを、自動変速機用のギア選択装置20のシフト信号SWによってシフトさせることができる。装置20は、運動パラメータ、すなわち回転速度n、牽引力Fx、速度v、勾配STならびにアクセスペダル作動値FPおよびアクセスペダル作動勾配dFP/dtを受け取るように設計されている。
【0025】
装置20は計算装置21を有し、それにより、惰行段階Sの前の牽引段階Z1において、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値を、特定の速度vおよび特定の勾配STに応じて形成することができる。メモリ装置22が、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値を記憶する役割を果たす。
【0026】
惰行段階Sの間の回転速度nおよび、若しくはまたは牽引力レベルFxの移動平均値に基づいて、決定装置23が、後続する牽引段階Z2に対する自動変速機10の少なくとも1つの選択ギアを決定する。
【0027】
牽引段階Z2の開始時に、現アクセルペダル作動値FPおよび、若しくはまたは現アクセルペダル作動勾配dFP/dtが直接確定されることが好ましく、必要な場合は、決定装置23によって事前に決定された選択ギアが適合される。
【0028】
言い換えれば、選択ギアには、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値によって表される履歴のみでなく、アクセルペダル作動値FPおよび、若しくはまたはアクセスペダル作動勾配dFP/dtによって表される、惰行段階の最後における運転者の現動的要求も反映される。
【0029】
惰行段階Sの間のアクセルペダル作動値FPおよび、若しくはまたはアクセスペダル作動勾配dFP/dtによって解釈される動的要求が変化しなかった場合、たとえば、先に決定された選択ギアに対して変更はない。対応する変化が発生した場合、所定の適合基準に従って対応する選択ギアの変更が適切に行われる。
【0030】
図2は、図1による自動車の惰行段階後の牽引段階に対する自動変速機のギア選択装置の機能を説明するルートプロファイルの例示的な図を示す。
【0031】
図2において、参照符号Pは、運転時間tに応じた勾配STを含むルートプロファイルを示し、勾配は、簡単にする理由で区分において一定であるものとする。
【0032】
牽引段階Z1の間、それぞれ現速度vおよび現勾配STに応じて、回転速度レベルの移動平均値<n(v、ST)>が形成される。移動平均の対応する時間間隔を、△tによって示す。同様に、別の方法としてまたは追加の方法として、それぞれの速度vおよび勾配STに応じて、牽引力の移動平均値<Fx(v、ST)>が形成される。
【0033】
時刻t0において、惰行段階Sが開始し、その間、自動車の駆動装置は電源が切られるかまたは段階的に空転状態になり、自動変速機10は、設計に応じて、ニュートラル位置になるかまたはトルク伝達クラッチの開放によって切離し状態になる。本例において分かるように、惰行段階は、下り坂を走行中に負の勾配STで発生する。惰行段階Sの間、現速度v*および現勾配ST*に応じて、かつ現速度v*および現勾配ST*に対する回転速度レベルnの記憶された移動平均値を考慮して、運転者の回転速度要求Wnが形成され、勾配ST*および、若しくはまたは速度v*が変化するに従って常に変更される。
【0034】
同様に、牽引力レベルFxの記憶された移動平均値を考慮して、瞬間速度v*および瞬間勾配ST*に対応して、運転者の牽引力要求WFxが形成される。前記回転速度要求Wnおよび、若しくはまたは牽引力要求Fxから、少なくとも1つの選択ギアGが確定される。任意に、複数の選択ギアを確定しそれらに対し適切に優先順位を与えることもさらに可能である(図5を参照)。
【0035】
回転速度要求Wnおよび牽引力要求WFxを連続して適合させることにより、選択ギアもまたそれに応じて変更される。惰行段階Sの最後において、現速度v’および現勾配ST’は時刻t1の時点である。そこから、回転速度要求Wn’および、若しくはまたは牽引力要求WFx’を同様に導出することができる。惰行段階が非常に短い場合、または(FPおよび、若しくはまたはdPF/dtから)惰行段階の最後における新たに解釈された運転者の要求が記憶されたデータに対応する場合、履歴から確定される前記選択ギアGを、最終的な選択ギアとして即座に決定することができ、先のギア選択によって先だって未だ行われていなかった場合自動変速機10をそれに応じてシフトさせることができる。
【0036】
しかしながら、惰行段階Sの間、アクセスペダル作動値FPおよび、若しくはまたはアクセルペダル作動勾配dFP/dTは規則的に変化することになり、したがって、最終的な選択ギアG’に達するために対応する適合が必要になる。
【0037】
図3は、自動車の惰行段階後の牽引段階に対する自動変速機用の本発明によるギア選択方法の一実施形態を説明するフローチャートを示す。
【0038】
図3による本発明による方法の実施形態では、決定された選択ギアを、自動変速機10において事前に噛合させることができない。
【0039】
プログラムはステップS0で開始する。ステップS1において、所定時間間隔t△に対するそれぞれ現速度vおよびそれぞれ現勾配STに応じて、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値を形成する。時間間隔△tの長さは、少なくとも1つの運転パラメータ、たとえば運転速度vに応じて可変であり得る。前記ステップS1は、言わば無限ループで実行する。前記時間間隔を、他の惰行段階も含めることができる長さであるように選択することができる。ステップS2において、惰行段階がアクティブであるか否かを検査する。アクティブでない場合、方法はステップS0に戻る。
【0040】
惰行段階が起動されている場合、方法はステップS2からステップS8に分岐し、そこで、惰行段階における瞬間速度v*および瞬間勾配ST*を各々確定する。
【0041】
S1からの記憶されたデータ、瞬間速度v*および瞬間勾配ST*を参照して、ステップS9aにおいて、回転速度要求Wnを決定し、かつ、若しくはまたはステップS9bにおいて、牽引力要求WFxを決定する。
【0042】
ステップS10において、回転速度要求Wnおよび、若しくはまたは牽引力要求WFxに基づいて、少なくとも1つの選択ギアGを決定する。前記選択ギアGは、惰行段階Sの間の瞬間速度v*および、若しくはまたは勾配ST*に対応して連続的に適合される。
【0043】
同時に、ステップS3において、次の牽引段階(図2におけるZ2)への遷移が適切であるか否かを連続的に検査する。適切でない場合、方法は、戻って、無限ループでステップS8〜S10を実行する。
【0044】
ステップS3において、次の牽引段階への遷移が発生していることを認識した場合、ステップS4a、ステップS4b、ステップS4cを実行して、状況に関する要求を再評価する。
【0045】
詳細には、ステップS4aおよびステップS4bにおいて、現アクセルペダル作動値FPおよび、若しくはまたは現アクセルペダル作動勾配dFP/dTを確定し、それに基づいて、ステップS4aにおいて回転速度要求Wnを、かつ、若しくはまたはステップS4bにおいて牽引力要求WFxを補正する。この場合、記憶されたデータから定義された方法で重み付けされた、回転速度要求および牽引力要求を、惰行段階の最後における回転速度および牽引力に対する値の確定に使用することができる。前記新たな値が、ステップS9aおよびステップS9bにおいて決定された対応する値から逸脱している場合、ステップS10において決定された選択ギアGを、ステップS4cで決定された最終的な選択ギアG’に置き換える。
【0046】
その後、ステップS5において最終的な選択ギアG’を噛合させ、一方でステップS6において、エンジンの回転速度レベルnを、決定された最終的な選択ギアG’と同期させる。
【0047】
最後に、ステップS7において、クラッチを入れることにより摩擦接続を取得し、その後、方法はステップS0に戻り、回転速度レベルnおよび、若しくはまたは牽引力レベルFxの移動平均値の形成が継続するかまたは再度開始する。
【0048】
図4は、自動車の惰行段階の後の牽引段階に対する自動変速機用の本発明によるギア選択方法の別の実施形態を説明するフローチャートを示す。
【0049】
図4に示す実施形態では、自動変速機10において単一の決定された選択ギアGを事前に噛合させることが可能である。図3による本発明による方法の上記第1実施形態とは対照的に、これを、それぞれ現選択ギアGを決定するステップS10に直接隣接しているステップS4c’で行う。
【0050】
第2実施形態では、ステップS3において、来たるべき牽引段階への遷移が発生することを認識した場合、上述した実施形態と同様に、ステップS4aおよび、若しくはまたはステップS4bにおいて、回転速度要求Wnおよび、若しくはまたは牽引力要求WFxを再評価する。
【0051】
この場合、記憶されたデータから決定された方法で重み付けされた、回転速度要求および牽引力要求を、惰行段階の最後における回転速度および牽引力に対する値の確定に使用することができる。
【0052】
ステップS11において、ステップS4cからの結果に従ってシフト操作が必要であるか否かを検査する。シフト操作が必要でない場合、第1実施形態と同様に、ステップS6においてエンジンの回転速度を同期させ、ステップS7において、すでに選択されたギアにある変速機の摩擦接続をもたらす。
【0053】
シフト操作が必要である場合、それを、後に、ステップS6においてエンジンの回転速度nを同期させる前に、ステップS11の後にステップS12で行う。動的要求が下がった場合、シフト操作が必要である可能性が高く、その結果、より多くの時間を使用できる傾向があるように、要求ギアGを選択する。シフト時間の異なる変速機の場合、各場合においてギア変更に応じて、事前に噛合されるギアを選択することも可能であり、それにより、シフト時間の短いシフト操作のみが必要である傾向がある。
【0054】
第1実施形態と同様に、方法は、ステップS7の後にステップS0に戻る。
【0055】
図5は、自動車の惰行段階の後の牽引段階に対する自動変速機用の本発明によるギア選択方法のさらに別の実施形態を説明するフローチャートを示す。
【0056】
本発明による方法の第3実施形態では、自動変速機10は、2つの決定された選択ギアG1、G2に事前に噛合させることができる。
【0057】
それに応じて、回転速度要求Wnおよび、若しくはまたは牽引力要求WFxを確定するステップS9a、ステップS9bの後に、ステップS10’で対応する高い方の第1優先度PR1および対応する低い方の第2優先度PR2をそれぞれ有する第1選択ギアG1および第2選択ギアG2を決定する。優先度PR1、PR2を、たとえば、スポーティな高い方のギアが優先されるように選択することができる。
【0058】
第1選択ギアG1は、移動平均によって確定された値を上回る回転速度要求および、若しくはまたは牽引力要求に対応し、第2選択ギアG2は、移動平均によって確定された値を下回る回転速度要求および、若しくはまたは牽引力要求に対応する。
【0059】
ステップS10’に続くステップS4’’において、2つの決定された選択ギアG1、G2を噛合させる。
【0060】
2つの上述した実施形態に類似して、ステップS3の検査により肯定的な結果が明らかとなる場合、ステップS4a、ステップS4bにおいて、回転速度要求Wnおよび、若しくはまたは牽引力要求WFxを再評価し、ステップS4cにおいて、選択ギアG1、G2を変更することができ、より高い優先度に従って、選択ギアのうちの1つを最終的に選択することができる。
【0061】
続くステップS11、ステップS12またはステップS6、ステップS7は、本発明の方法の第2実施形態に関してすでに上述したように、同様に進む。
【0062】
本発明を、好ましい例示的な実施形態に関して上述したが、本発明はそれに限定されず、さまざまな方法で変更することが可能である。
【符号の説明】
【0063】
S 惰行段階
Z1 牽引段階
Z2 牽引段階
n 回転速度レベル
Fx 牽引力レベル
v 速度
ST 勾配
【特許請求の範囲】
【請求項1】
自動車の惰行段階(S)後の牽引段階(Z2)に対する自動変速機用のギア選択方法であって、
前記惰行段階(S)の前の牽引段階(Z1)において、回転速度レベル(n)および、若しくはまたは牽引力レベル(Fx)の移動平均値が、特定の速度(v)および特定の勾配(ST)に応じて形成され、
そして、前記移動平均値が前記特定の惰行段階(S)の後の前記牽引段階(Z2)に対する前記自動変速機の少なくとも1つの選択ギアを決定するために考慮される、ギア選択方法。
【請求項2】
運転者の回転速度要求(Wn)が、前記惰行段階(S)の最後における現速度(v’)および現勾配(ST’)に対する前記回転速度レベル(n)の前記移動平均値を考慮して決定され、
それに基づいて、対応する選択ギアが決定される、請求項1に記載のギア選択方法。
【請求項3】
運転者の牽引力要求(WFx)が、前記惰行段階(S)の最後における現速度(v’)および現勾配(ST’)に対する前記牽引力レベル(Fx)の前記移動平均値を考慮して決定され、
前記牽引力要求(WFx)が、対応する回転速度および、若しくはまたはエンジントルク要求に変換され、
それに基づいて、対応する選択ギアが決定される、請求項1または2に記載のギア選択方法。
【請求項4】
運転者の回転速度要求(Wn)が、前記惰行段階(S)の最後における現速度(v’)および現勾配(ST’)に対する前記回転速度レベル(n)の前記移動平均値を考慮して決定され、
それに基づいて、対応する第1選択ギアおよび第2選択ギアが決定され、
前記第1選択ギアが、前記移動平均によって確定された値を上回る回転速度要求(Wn)に対応し、前記第2選択ギアが、前記移動平均によって確定された前記値を下回る回転速度要求(Wn)に対応する、請求項1に記載のギア選択方法。
【請求項5】
運転者の牽引力要求(WFx)が、前記惰行段階(S)の最後における現速度(v’)および現勾配(ST’)に対する前記牽引力レベル(Fx)の前記移動平均値を考慮して決定され、
前記牽引力要求(WFx)が、対応する回転速度要求に変換され、
それに基づいて、対応する第1選択ギアおよび第2選択ギアが決定され、
前記第1選択ギアが、前記移動平均によって確定された値を上回る牽引力要求(WFx)に対応し、前記第2選択ギアが、前記移動平均によって確定された前記値を下回る牽引力要求(WFx)に対応する、請求項1に記載のギア選択方法。
【請求項6】
特定の惰行段階(S)の最後の時点で、現アクセルペダル作動値および、若しくはまたは現アクセルペダル作動勾配の確定が行われ、それに応じて、前記少なくとも1つの決定された選択ギアが適合される、請求項1〜5のいずれか一項に記載のギア選択方法。
【請求項7】
前記自動変速機が、前記決定された選択ギアの事前噛合を可能にせず、前記選択ギアが、前記惰行段階(S)の最後に噛合し、前記惰行段階(S)の最後における回転速度が同期し、その後、摩擦接続が確立される、請求項1〜6いずれか一項に記載のギア選択方法。
【請求項8】
前記自動変速機が、単一の決定された選択ギアの事前噛合を可能とし、前記選択ギアが前記惰行段階(S)の間に噛合し、前記惰行段階(S)の最後における回転速度が同期し、その後、摩擦接続が確立される、請求項1〜6いずれか一項に記載のギア選択方法。
【請求項9】
前記自動変速機が2つの決定された選択ギアの事前噛合を可能とし、前記第1選択ギアおよび前記第2選択ギアが前記惰行段階(S)の間に噛合し、事前決定された基準に従って優先順位が付けられている、前記第1選択ギアおよび前記第2選択ギアからのギアが、前記惰行段階(S)の最後において、最終的な選択ギアとして決定され、前記惰行段階(S)の最後における回転速度が同期し、その後、摩擦接続が確立される、請求項4または5に記載のギア選択方法。
【請求項10】
前記第1選択ギアおよび前記第2選択ギアからのよりスポーティなギアが、前記惰行段階(S)の最後において最終的な選択ギアとして決定される、請求項9に記載のギア選択方法。
【請求項11】
前記回転速度レベル(n)および、若しくはまたは前記牽引力レベル(Fx)の前記移動平均値が形成される時間窓(△t)が、少なくとも1つの運転パラメータに応じて可変である、請求項1〜10いずれか一項に記載のギア選択方法。
【請求項12】
前記噛合したギアの前記選択が、長さの異なるシフト時間があるという事実を考慮する、請求項1〜11いずれか一項に記載のギア選択方法。
【請求項13】
自動車の惰行段階(S)後の牽引段階(Z2)に対する自動変速機用のギア選択装置であって、
前記惰行段階(S)の前の牽引段階(Z1)において、回転速度レベル(n)および、若しくはまたは牽引力レベル(Fx)の移動平均値を、特定の速度(v)および特定の勾配(ST)に応じて形成し、そして、前記移動平均値を考慮して前記特定の惰行段階(S)の後の前記牽引段階(Z2)に対する前記自動変速機の少なくとも1つの選択ギアを決定するギア選択装置。
【請求項1】
自動車の惰行段階(S)後の牽引段階(Z2)に対する自動変速機用のギア選択方法であって、
前記惰行段階(S)の前の牽引段階(Z1)において、回転速度レベル(n)および、若しくはまたは牽引力レベル(Fx)の移動平均値が、特定の速度(v)および特定の勾配(ST)に応じて形成され、
そして、前記移動平均値が前記特定の惰行段階(S)の後の前記牽引段階(Z2)に対する前記自動変速機の少なくとも1つの選択ギアを決定するために考慮される、ギア選択方法。
【請求項2】
運転者の回転速度要求(Wn)が、前記惰行段階(S)の最後における現速度(v’)および現勾配(ST’)に対する前記回転速度レベル(n)の前記移動平均値を考慮して決定され、
それに基づいて、対応する選択ギアが決定される、請求項1に記載のギア選択方法。
【請求項3】
運転者の牽引力要求(WFx)が、前記惰行段階(S)の最後における現速度(v’)および現勾配(ST’)に対する前記牽引力レベル(Fx)の前記移動平均値を考慮して決定され、
前記牽引力要求(WFx)が、対応する回転速度および、若しくはまたはエンジントルク要求に変換され、
それに基づいて、対応する選択ギアが決定される、請求項1または2に記載のギア選択方法。
【請求項4】
運転者の回転速度要求(Wn)が、前記惰行段階(S)の最後における現速度(v’)および現勾配(ST’)に対する前記回転速度レベル(n)の前記移動平均値を考慮して決定され、
それに基づいて、対応する第1選択ギアおよび第2選択ギアが決定され、
前記第1選択ギアが、前記移動平均によって確定された値を上回る回転速度要求(Wn)に対応し、前記第2選択ギアが、前記移動平均によって確定された前記値を下回る回転速度要求(Wn)に対応する、請求項1に記載のギア選択方法。
【請求項5】
運転者の牽引力要求(WFx)が、前記惰行段階(S)の最後における現速度(v’)および現勾配(ST’)に対する前記牽引力レベル(Fx)の前記移動平均値を考慮して決定され、
前記牽引力要求(WFx)が、対応する回転速度要求に変換され、
それに基づいて、対応する第1選択ギアおよび第2選択ギアが決定され、
前記第1選択ギアが、前記移動平均によって確定された値を上回る牽引力要求(WFx)に対応し、前記第2選択ギアが、前記移動平均によって確定された前記値を下回る牽引力要求(WFx)に対応する、請求項1に記載のギア選択方法。
【請求項6】
特定の惰行段階(S)の最後の時点で、現アクセルペダル作動値および、若しくはまたは現アクセルペダル作動勾配の確定が行われ、それに応じて、前記少なくとも1つの決定された選択ギアが適合される、請求項1〜5のいずれか一項に記載のギア選択方法。
【請求項7】
前記自動変速機が、前記決定された選択ギアの事前噛合を可能にせず、前記選択ギアが、前記惰行段階(S)の最後に噛合し、前記惰行段階(S)の最後における回転速度が同期し、その後、摩擦接続が確立される、請求項1〜6いずれか一項に記載のギア選択方法。
【請求項8】
前記自動変速機が、単一の決定された選択ギアの事前噛合を可能とし、前記選択ギアが前記惰行段階(S)の間に噛合し、前記惰行段階(S)の最後における回転速度が同期し、その後、摩擦接続が確立される、請求項1〜6いずれか一項に記載のギア選択方法。
【請求項9】
前記自動変速機が2つの決定された選択ギアの事前噛合を可能とし、前記第1選択ギアおよび前記第2選択ギアが前記惰行段階(S)の間に噛合し、事前決定された基準に従って優先順位が付けられている、前記第1選択ギアおよび前記第2選択ギアからのギアが、前記惰行段階(S)の最後において、最終的な選択ギアとして決定され、前記惰行段階(S)の最後における回転速度が同期し、その後、摩擦接続が確立される、請求項4または5に記載のギア選択方法。
【請求項10】
前記第1選択ギアおよび前記第2選択ギアからのよりスポーティなギアが、前記惰行段階(S)の最後において最終的な選択ギアとして決定される、請求項9に記載のギア選択方法。
【請求項11】
前記回転速度レベル(n)および、若しくはまたは前記牽引力レベル(Fx)の前記移動平均値が形成される時間窓(△t)が、少なくとも1つの運転パラメータに応じて可変である、請求項1〜10いずれか一項に記載のギア選択方法。
【請求項12】
前記噛合したギアの前記選択が、長さの異なるシフト時間があるという事実を考慮する、請求項1〜11いずれか一項に記載のギア選択方法。
【請求項13】
自動車の惰行段階(S)後の牽引段階(Z2)に対する自動変速機用のギア選択装置であって、
前記惰行段階(S)の前の牽引段階(Z1)において、回転速度レベル(n)および、若しくはまたは牽引力レベル(Fx)の移動平均値を、特定の速度(v)および特定の勾配(ST)に応じて形成し、そして、前記移動平均値を考慮して前記特定の惰行段階(S)の後の前記牽引段階(Z2)に対する前記自動変速機の少なくとも1つの選択ギアを決定するギア選択装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−2358(P2012−2358A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−132373(P2011−132373)
【出願日】平成23年6月14日(2011.6.14)
【出願人】(510238096)ドクター エンジニール ハー ツェー エフ ポルシェ アクチエンゲゼルシャフト (63)
【氏名又は名称原語表記】Dr. Ing. h.c. F. Porsche Aktiengesellschaft
【住所又は居所原語表記】Porscheplatz 1, D−70435 Stuttgart, Germany
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2011−132373(P2011−132373)
【出願日】平成23年6月14日(2011.6.14)
【出願人】(510238096)ドクター エンジニール ハー ツェー エフ ポルシェ アクチエンゲゼルシャフト (63)
【氏名又は名称原語表記】Dr. Ing. h.c. F. Porsche Aktiengesellschaft
【住所又は居所原語表記】Porscheplatz 1, D−70435 Stuttgart, Germany
【Fターム(参考)】
[ Back to top ]