
Fターム[3J552PA35]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 目的(一般) (9,045) | 車両関係 (1,319) | 登坂走行性能 (65)
Fターム[3J552PA35]に分類される特許
1 - 20 / 65
機械式自動変速装置の変速制御機構
【課題】車両の外的要因である路面勾配や車両総重量を考慮した制御を行ない、登坂時の失速や平坦路における燃費の悪化を防止することが出来る機械式自動変速装置の変速制御機構の提供。
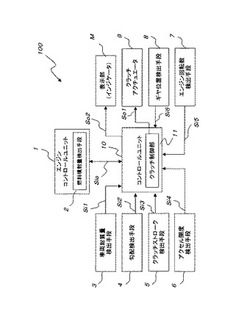
【解決手段】燃料噴射量検出手段(2)と、燃料噴射制御装置(1)と、車両総重量検出手段(3)と、路面勾配検出手段(4)と、コントロールユニット(10)を備え、前記燃料噴射量検出手段(2)は燃料噴射量の時間特性(傾きG)を演算する機能を有しており、前記コントロールユニット(10)は、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能とを有している。
(もっと読む)
車両制御装置

【課題】アイドリングストップ機能が作動した場合でも、エンジン始動のために煩雑な操作が必要とされない車両制御装置の提供。
【解決手段】機械式自動変速機と、車両が停止した際にエンジンを停止するアイドリングストップ装置(1)と、道路の勾配を検出する勾配検出装置(2)と、コントロールユニット(10)を含み、当該コントロールユニット(10)は、勾配検出装置(2)により検出された勾配がしきい値以上であり且つアイドリングストップ装置(1)の作動が要請された場合に、クラッチを切り且つ検出された勾配に適したギヤを選択する機能を有していることを特徴としている。
(もっと読む)
車両の制御装置
【課題】ドライバビリティの低下の抑制とエンジンストールの発生の防止とを両立することができる車両の制御装置を提供する。
【解決手段】ECUは、登坂路の傾斜角が所定値以上であり(ステップS11でYES)、アクセルOFFであり(ステップS12でYES)、指示レンジが示す車両の進行方向と逆方向への車速が増加していると判断すると(ステップS13でYES)、エンジン回転数を上昇させる(ステップS14)。次に、ECU10は、エンジンストール予測車速Vpredを取得し、現在のタービン回転数の単位時間当たりの上昇率から、エンスト直前判定条件に用いる所定値Bを算出する(ステップS15)。そして、エンジン回転数とタービン回転数との回転数差が所定値Bより小さくなった場合にエンスト直前判定が成立したと判断し(ステップS16でYES)、エンスト防止制御を実行する(ステップS17)。
(もっと読む)
作業車の走行伝動切り換え構造
【課題】操作の複雑化を招くことなく、坂道などの傾斜地において車体をスムーズに発進させられるようにする。
【解決手段】制御手段が、検出手段の出力に基づいてパーキングブレーキの制動状態を検知している状態で、第1操作手段からの伝動経路切換手段に関する所定の伝動系路の接続指令を受け取り、かつ、第2操作手段からの多板式の伝動断続手段に関する接続指令を受け取ると、伝動経路切換手段を、2つの伝動系路を接続する2重伝動状態に切り換えて車輪の回転を阻止し、その後、検出手段の出力に基づいてパーキングブレーキの制動解除状態への切り換えを検知すると、伝動断続手段の遮断状態から伝動状態への切り換えを開始し、伝動断続手段が半伝動状態に至るのに伴って、伝動経路切換手段を2重伝動状態から所定の伝動系路を接続する伝動状態に切り換えるように構成してある。
(もっと読む)
ハイブリッド車両の制御装置
【課題】登坂走行時に大きな駆動力が要求される状況であっても、電動車両状態からハイブリッド車両状態へ走行状態を適切に切り替えることができるハイブリッド車両の制御装置を提供すること。
【解決手段】内燃機関と駆動輪との間の伝達トルク容量を連続的に変更可能なクラッチ機構を備え、EV状態と前記内燃機関を稼動させるHV状態とを切替可能なハイブリッド車両の制御装置において、登坂路走行時に前記ハイブリッド車両の走行状態を前記電動車両状態から前記ハイブリッド車両状態へ切り替える場合、前記第1電動機の出力と前記クラッチ機構の係合・解放動作とを協調制御することにより、前記駆動軸の回転数を維持しつつ前記クランク軸の回転数を上昇させた状態で、前記内燃機関を始動させる内燃機関始動手段(ステップS4,S5)を設けた。
(もっと読む)
車両の制御装置
【課題】勾配路における発進時の応答性を向上可能な車両の制御装置を提供する。
【解決手段】車両停止状態からの発進時、所定増加割合により動力源の駆動トルクを増加させるにあたり、検知された路面勾配が所定以上、かつ、車速が略0の状態が所定時間以上継続し目標駆動トルクが勾配負荷トルク相当値以上のときは、目標駆動トルクの増加割合を平坦路における所定増加割合よりも大きな勾配路用増加割合に変更する。尚、この勾配路用増加割合は、運転者のアクセルペダル開度が大きい程、大きな増加割合となるように設定する。
(もっと読む)
無段変速機及び変速制御方法
【課題】勾配路を走行中にも車両の駆動力を確保できる無段変速機を提供する。
【解決手段】変速制御部(12)は、車両が急勾配路を走行している場合に、副変速機構(30)をアップシフトを禁止する勾配路アップシフト禁止手段と、勾配路アップシフト禁止手段により副変速機構(30)のアップシフトが禁止されているときに、車両が所定の走行状態で走行している場合は、副変速機構(30)をアップシフトさせる勾配路アップシフト手段と、を備え、勾配路アップシフト手段は、車両が勾配路を走行中であっても、スルー変速比が変化しないようにバリエータ(20)の変速比を副変速機構(30)の変速比の変化に対応して変化させながら副変速機構(30)の変速を実行する。
(もっと読む)
車両の制御装置
【課題】登坂路での発進時の駆動力を確保しながら、燃費の改善を図る。
【解決手段】路面勾配が大きいほど車両停止時の目標変速比(目標入力回転数Nint)を大きい側に設定しているので、平坦路や緩やかな登坂路のように路面勾配が小さい場合には変速タイミング(L/U−off車速Vs0,Vs1)を遅らすことができる。これによって変速比をHi側に維持できる範囲を広げることが可能となり、燃費の改善を図ることができる。また、急登坂路などの路面勾配が大きい場合には、車両停止時の変速比を最大変速比γmaxにすることで車両発進時の駆動力を確保することができるので、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることが可能になる。
(もっと読む)
自動車の惰行段階後の牽引段階に対する自動変速機用のギア選択方法
【課題】自動車の惰行段階後の牽引段階に対する自動変速機用の改善されたギア選択方法および改善されたギア選択装置を提供する。
【解決手段】本発明は、自動車の惰行段階(S)後の牽引段階(Z2)に対する自動変速機用のギア選択方法および装置に関する。本発明による方法では、惰行段階(S)の前の牽引段階(Z1)において、回転速度レベル(n)および、若しくはまたは牽引力レベル(Fx)の移動平均値が、特定の速度(v)および特定の勾配(ST)に応じて形成され、そして、その移動平均が特定の惰行段階(S)の後の牽引段階(Z2)に対する自動変速機の少なくとも1つの選択ギアを決定するために考慮される。
(もっと読む)
駆動制御装置
【課題】駆動制御装置において、慣性走行中により適切に減速することを可能とする。
【解決手段】駆動制御装置(100)は、車両(1)の動力源(10)で発生した回転動力を車両の駆動輪に伝達する伝達状態、及び、回転動力を駆動輪に伝達せず車両に慣性走行させる非伝達状態のうちいずれか一方からいずれか他方へ切り替え可能な切り替え手段(23等)と、駆動輪の駆動軸の回転速度と動力源の回転速度との比である変速比を変更可能な変速手段(20)と、非伝達状態において駆動軸の回転速度を低下させる場合、切り替え手段によって非伝達状態から伝達状態へ切り替えさせた後、変速比を変更するように変速手段を制御する制御手段(43)とを備える。
(もっと読む)
自動変速機の変速制御装置
【課題】車両のエンストを起こす可能性を低減しつつ、変速機のシフト操作を不要にしかつ車両の走行性を向上する。
【解決手段】制御部(ECU)2は、エンジントルク検出部4で検出されたエンジントルクが予め設定された設定エンジントルク値以上であり、アクセル開度検出部5で検出されたアクセル開度が予め設定された設定アクセル開度値以上であり、勾配検出部6で検出された走行路面の勾配が予め設定された設定勾配値以上であり、積載重量検出部7で検出された積載重量が予め設定された設定積載重量値以上であるときで、エンジン回転検出部3で検出されたエンジン回転数が予め設定された設定エンジン回転数以下であるとき、設定されている自動変速機12の変速段をシフトダウンする。
(もっと読む)
車両用駆動装置の制御装置
【課題】エアコン用コンプレッサの断接時におけるトルク変動を抑制して、エアコン用コンプレッサの断接時においてもドライバビリティの悪化を抑制可能な車両用駆動装置の制御装置を提供する。
【解決手段】エンジン6と、モータ7と、モータ7に接続されるとともに第1クラッチ41を介して選択的にエンジン6に接続される第1入力軸としての第1主軸11と、第2クラッチ42を介して選択的にエンジン6に接続される第2入力軸としての第2中間軸16と、ロック機構61又は第1変速用シフター51を介して選択的に第1主軸11と連結されるとともに第2変速用シフター52を介して選択的に第2中間軸16に連結されるカウンタ軸14と、を備えた変速機20と、エアコン用クラッチ121を介して第1主軸11に連結されるエアコン用コンプレッサ112と、を備えた車両用駆動装置1の制御装置2であって、エアコン用クラッチ121の断接時に発生するトルク変動をモータ7で吸収するようにモータ7を制御する。
(もっと読む)
自動変速機の制御装置
【課題】車両が登坂路をパワーオン走行しながら減速中にダウンシフトする際、エンジン回転数とタービン回転数との差回転に起因して発生する変速ショックを抑制する。
【解決手段】ECU100は、パワーオン状態でダウンシフトの要求があると判定し(ステップST1:YES)、さらに、車両の加速度が基準加速度未満であると判定すると(ステップST2:YES)、車両の加速度および、エンジン回転数とタービン回転数との差回転数に応じて、解放側摩擦係合要素の解放動作の開始タイミングを遅延側に補正するとともに、解放側摩擦係合要素のスイープダウン指示油圧の低下率が小さくなるように補正する(ステップST3,ST4)。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両の進行方向での道路の勾配情報に応じて、モータによる車両の駆動力のアシストを制御して、車両の円滑な走行を維持する。
【解決手段】 本発明は、ハイブリッド車両の制御装置を提供する。その制御装置は、ナビゲーション装置からの勾配情報により車両の進行方向に緩やかな傾斜があると判断され、かつアクセルペダル変化量検出手段により検出されたアクセルペダルの変化量が所定値未満である場合、車両の速度を一定に維持すべきと判定する速度維持判定手段と、ナビゲーション装置からの勾配情報に基づいて、車両の進行方向での勾配負荷を算出する勾配負荷算出手段と、勾配負荷算出手段からの勾配負荷に応じて、モータによる車両の駆動力のアシストを制御するアシスト制御手段と、を備える。
(もっと読む)
自動変速機の変速制御装置および変速制御方法
【課題】運転者の要求する駆動力のより早い実現と、駆動トルク中断を回避したスムーズな変速を両立できる制御装置および制御方法を提案することにある。
【解決手段】アクセルオフ状態からのキックダウンのように、運転者が早急な加速を要求している場合は、摩擦伝達機構を解放して、駆動力源の動力の出力軸への伝達を一旦遮断状態としたのち、目的とする変速段の摩擦伝達機構を締結する。その他の変速の場合は、トルクを伝達していた摩擦伝達機構を徐々に解放しながら、次変速段の摩擦伝達機構を徐々に締結する。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置において、登坂路又は降坂路にて運転者に違和感を与えることなくEV発進すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びにいずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。IN又はOUT接続状態にて登坂路(降坂路)でEV発進する場合、ブレーキ操作対応制動力の付与終了(t2)からM/G駆動トルクの付与開始(t3)までの間(制動力もM/G駆動トルクも付与されない期間)に亘ってE/G駆動(回生)トルクが駆動輪に付与される。登坂路での「発進前の一時的な後進」、並びに降坂路での「発進直後の車速の急激な増大」が抑制される。
(もっと読む)
自動変速機の制御装置
【課題】登降坂路を走行する車両の走行状態に応じた適切なプレシフト制御を実行できる自動変速機の制御装置を提供する。
【解決手段】ECUは、車両が登坂路を走行中であると判定した場合(ステップS12が肯定判定)、運転手から加速要求がなされる可能性が高いか否かを判定する加速要求判定処理を実行する(ステップS13)。そして、ECUは、運転手が加速を要求する可能性が高いと判定した場合(ステップS14が肯定判定)、ダウンシフト側へのプレシフト制御を実行する(ステップS15,S20)。
(もっと読む)
ハイブリッド自動車およびその制御方法並びに駆動装置
【課題】内燃機関の運転を停止してリバース走行している最中に発電機を駆動するインバータに短絡故障が生じたとに内燃機関が逆回転するのを抑制する。
【解決手段】リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定し(S180)、リバース走行を中止すると共にリバース走行を禁止する(S190)。これにより、モータMG1の誘導起電圧によって生じるトルクにより若干のエンジン22の逆回転が生じるものの、エンジン22が継続して逆回転するのを抑止することができる。
(もっと読む)
自動変速機の制御装置
【課題】的確な登坂制御実行判定を実現できる自動変速機の制御装置を提供する。
【解決手段】コントローラ5は、あらかじめアクセル開度に応じた理想エンジントルク特性を記憶した理想エンジントルク特性記憶部21と、アクセル開度から理想エンジントルク特性を参照して得られた理想エンジントルクに基づいて、アクセル開度に応じた車両の理想加速度を算出する理想加速度算出部22と、車両の実加速度を算出する実加速度算出部23と、理想加速度と実加速度とに基づいて、登坂制御実行用パラメータを算出する登坂制御実行用パラメータ算出部24と、登坂制御実行用パラメータがあらかじめ設定した登坂制御実行判定閾値よりも大きい場合、登坂制御を実行させるように自動変速機を制御する変速制御部25と、を備える。
(もっと読む)
1 - 20 / 65
[ Back to top ]