
ハイブリッド自動車およびその制御方法並びに駆動装置
【課題】内燃機関の運転を停止してリバース走行している最中に発電機を駆動するインバータに短絡故障が生じたとに内燃機関が逆回転するのを抑制する。
【解決手段】リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定し(S180)、リバース走行を中止すると共にリバース走行を禁止する(S190)。これにより、モータMG1の誘導起電圧によって生じるトルクにより若干のエンジン22の逆回転が生じるものの、エンジン22が継続して逆回転するのを抑止することができる。
【解決手段】リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定し(S180)、リバース走行を中止すると共にリバース走行を禁止する(S190)。これにより、モータMG1の誘導起電圧によって生じるトルクにより若干のエンジン22の逆回転が生じるものの、エンジン22が継続して逆回転するのを抑止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド自動車およびその制御方法並びに駆動装置に関し、詳しくは、内燃機関と、動力を入出力可能な同期電動発電機と、内燃機関の出力軸と発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で回転軸,出力軸,駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、同期電動発電機を駆動するインバータと、電動機を駆動する駆動回路と、インバータおよび駆動回路に接続されて同期電動発電機および電動機と電力のやりとりが可能な蓄電手段と、内燃機関の間欠運転を伴って走行に要求される要求駆動力により走行するよう内燃機関とインバータと駆動回路とを制御する制御手段と、を備えるハイブリッド自動車、および、こうしたハイブリッド自動車におけるインバータに短絡故障が生じたときのハイブリッド自動車の制御方法、並びに、こうしたハイブリッド自動車に内燃機関および蓄電手段と共に搭載される駆動装置に関する。
【背景技術】
【0002】
従来、この種のハイブリッド自動車としては、エンジンと、発電機と、エンジンのクランクシャフトと発電機の回転軸と後輪に連結されたプロペラシャフトとにキャリアとサンギヤとリングギヤとが各々接続された遊星歯車機構と、プロペラシャフトに2段変速の変速機を介して取り付けられた走行モータと、発電機を駆動する発電機用インバータと、走行モータを駆動する走行モータ用インバータと、発電機用インバータおよび走行モータ用インバータに接続された直流電源と、を備え、発電機用インバータと走行モータ用インバータのうちの一方のインバータに過電流が発生したときには過電流が発生したインバータの駆動を停止すると共に過電流が発生していないインバータを駆動することにより発電機または走行モータを駆動するものが提案されている(例えば、特許文献1参照)。このハイブリッド自動車では、一方のインバータに過電流が生じたときでも他方のインバータを駆動することにより、車両の安全な退避走行を有効に行なえるようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−245372号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のハイブリッド自動車では、発電機用インバータに短絡故障が生じたときに、エンジンを停止した状態で走行モータ用インバータを駆動して走行モータによりリバース走行すると、遊星歯車機構の特性により発電機が回転し、発電機の回転に伴って発電機に生じる誘導起電力によってエンジンが逆回転する場合が生じる。特に吸気、圧縮、膨張、排気の4行程により動力を出力する4サイクルエンジンでは、一方向にのみ回転するよう設計されているため、逆回転すると、排気を吸気側に送ることになり、好ましくない。また、退避走行などのためにエンジンの逆回転を許容するものとしても、エンジンの逆回転による振動に車両が共振する場合は回避されることが望まれる。
【0005】
本発明のハイブリッド自動車およびその制御方法並びに駆動装置は、内燃機関の運転を停止してリバース走行している最中に発電機を駆動するインバータに短絡故障が生じたとに内燃機関が逆回転するのを抑制することを主目的とし、発電機を駆動するインバータに短絡故障が生じている最中に内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには内燃機関の逆回転による振動の影響を抑制することを目的の一つとする。
【課題を解決するための手段】
【0006】
本発明のハイブリッド自動車およびその制御方法並びに駆動装置は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明のハイブリッド自動車は、
内燃機関と、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記同期電動発電機を駆動するインバータと、前記電動機を駆動する駆動回路と、前記インバータおよび前記駆動回路に接続されて前記同期電動発電機および前記電動機と電力のやりとりが可能な蓄電手段と、を備えるハイブリッド自動車であって、
前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときには、前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する制御手段、
を備えることを要旨とする。
【0008】
この本発明のハイブリッド自動車では、内燃機関の運転を停止してリバース走行しているときにインバータに短絡故障が生じたときには、電動機から出力するトルクを値0としてリバース走行が禁止されるよう駆動回路を制御する。このように、リバース走行を禁止することにより、リバース走行に伴って同期電動発電機が回転し、同期電動発電機の回転に伴って同期電動発電機に生じる誘導起電力によって内燃機関が逆回転するのを抑制することができる。
【0009】
こうした本発明のハイブリッド自動車において、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記内燃機関が逆回転しないように前記電動機からトルクが出力されるよう前記駆動回路を制御する手段である、ものとすることもできる。こうすれば、内燃機関の逆回転を抑制しながら登坂路で発進することができる。この場合、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記電動機の回転数が車両を前進させる方向を正としたときに値0以上となるように前記電動機から出力されるトルクが調節されるよう前記駆動回路を制御する手段である、ものとすることもできる。
【0010】
また、本発明のハイブリッド自動車において、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには、車速の絶対値が車両の振動を抑制するために予め設定された所定車速以下となるように前記電動機からトルクが出力されるよう前記駆動回路を制御する手段である、ものとすることもできる。こうすれば、内燃機関の逆回転は許容するものの、内燃機関の逆回転に伴って車両が共振するのを抑制することができる。ここで、「リバース走行を許容しなければならないとき」には、退避走行のためにリバース走行しなければならないときや、登坂路で車両がずり下がってしまうときなどが含まれる。
【0011】
さらに、本発明のハイブリッド自動車において、運転者のブレーキ操作に拘わらずに車両に制動力を付与可能な制動力付与手段を備え、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記内燃機関が逆回転しないように前記電動機からのトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、ものとすることもできる。こうすれば、内燃機関の逆回転を抑制しながら登坂路で発進することができる。この場合、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記電動機の回転数が車両を前進させる方向を正としたときに値0以上となるように前記電動機から出力されるトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、ものとすることもできる。
【0012】
こうした制動力付与手段を備える態様の本発明のハイブリッド自動車において、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには、車速の絶対値が車両の振動を抑制するために予め設定された所定車速以下となるように前記電動機からのトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、ものとすることもできる。こうすれば、内燃機関の逆回転は許容するものの、内燃機関の逆回転に伴って車両が共振するのを抑制することができる。ここで、「リバース走行を許容しなければならないとき」には、退避走行のためにリバース走行しなければならないときや、登坂路で車両がずり下がってしまうときなどが含まれる。
【0013】
本発明のハイブリッド自動車において、前記電動機は、前記駆動軸に動力を入出力可能な第1電動機と、前記駆動軸が連結された駆動輪とは異なる車輪に連結された車軸に動力を入出力可能な第2電動機と、の二つを含む、ものとすることもできる。
【0014】
本発明の駆動装置は、
内燃機関および充放電可能な蓄電手段と共に自動車に搭載され、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記蓄電手段と電力をやりとり可能に接続されて前記同期電動発電機を駆動するインバータと、前記蓄電手段と電力をやりとり可能に接続されて前記電動機を駆動する駆動回路と、を備える駆動装置であって、
前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときには、前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する制御手段、
を備えることを要旨とする。
【0015】
この本発明の駆動装置では、内燃機関の運転を停止してリバース走行しているときにインバータに短絡故障が生じたときには、電動機から出力するトルクを値0としてリバース走行が禁止されるよう駆動回路を制御する。このように、リバース走行を禁止することにより、リバース走行に伴って同期電動発電機が回転し、同期電動発電機の回転に伴って同期電動発電機に生じる誘導起電力によって内燃機関が逆回転するのを抑制することができる。
【0016】
本発明のハイブリッド自動車の制御方法は、
内燃機関と、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記同期電動発電機を駆動するインバータと、前記電動機を駆動する駆動回路と、前記インバータおよび前記駆動回路に接続されて前記同期電動発電機および前記電動機と電力のやりとりが可能な蓄電手段と、を備える自動車における前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときの制御方法であって、
前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する、
ことを特徴とする。
【0017】
この本発明のハイブリッド自動車の制御方法では、内燃機関の運転を停止してリバース走行しているときにインバータに短絡故障が生じたときには、電動機から出力するトルクを値0としてリバース走行が禁止されるよう駆動回路を制御する。このように、リバース走行を禁止することにより、リバース走行に伴って同期電動発電機が回転し、同期電動発電機の回転に伴って同期電動発電機に生じる誘導起電力によって内燃機関が逆回転するのを抑制することができる。
【図面の簡単な説明】
【0018】
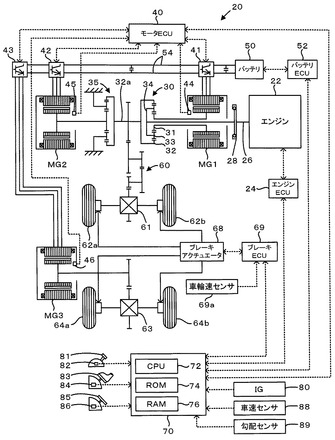
【図1】本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。
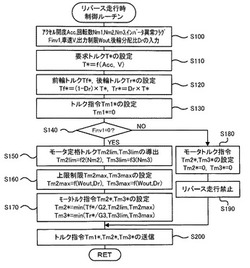
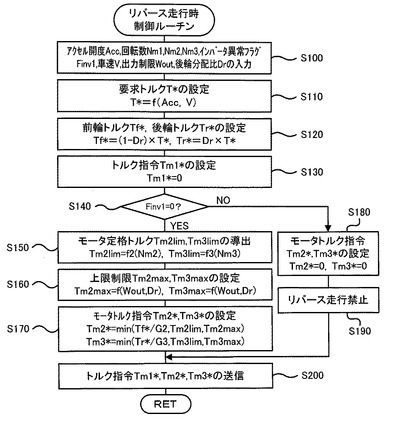
【図2】ハイブリッド用電子制御ユニット70により実行されるリバース走行時制御ルーチンの一例を示すフローチャートである。
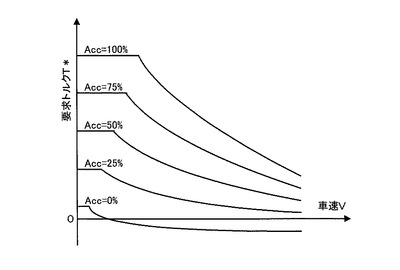
【図3】要求トルク設定用マップの一例を示す説明図である。
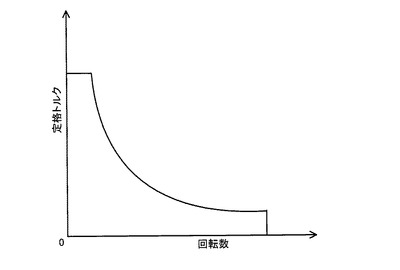
【図4】モータの定格トルクの一例を示す説明図である。
【図5】エンジン22の運転を停止してリバース走行しているときの動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
【図6】ハイブリッド用電子制御ユニット70により実行されるリバース禁止時発進制御ルーチンの一例を示すフローチャートである。
【図7】ハイブリッド用電子制御ユニット70により実行されるリバース許容制御ルーチンの一例を示すフローチャートである。
【図8】変形例のハイブリッド自動車120の構成の概略を示す構成図である。
【発明を実施するための形態】
【0019】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0020】
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、エンジン22と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介して接続された3軸式の動力分配統合機構30と、動力分配統合機構30に接続された発電可能なモータMG1と、動力分配統合機構30に接続されると共にギヤ機構60,デファレンシャルギヤ61を介して前輪62a,62bに接続された減速ギヤ35と、減速ギヤ35に接続されたモータMG2と、デファレンシャルギヤ63を介して後輪64a,64bに接続されたモータMG3と、車両の駆動系全体をコントロールするハイブリッド用電子制御ユニット70とを備える。
【0021】
エンジン22は、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関であり、エンジン22の運転状態を検出する各種センサから信号を入力するエンジン用電子制御ユニット(以下、エンジンECUという)24により燃料噴射制御や点火制御,吸入空気量調節制御などの運転制御を受けている。エンジンECU24は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッド用電子制御ユニット70に出力する。
【0022】
動力分配統合機構30は、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合すると共にリングギヤ32に噛合する複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備え、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行なう遊星歯車機構として構成されている。動力分配統合機構30は、キャリア34にはエンジン22のクランクシャフト26が、サンギヤ31にはモータMG1が、リングギヤ32には駆動軸としてのリングギヤ軸32aを介して減速ギヤ35がそれぞれ連結されており、モータMG1が発電機として機能するときにはキャリア34から入力されるエンジン22からの動力をサンギヤ31側とリングギヤ32側にそのギヤ比に応じて分配し、モータMG1が電動機として機能するときにはキャリア34から入力されるエンジン22からの動力とサンギヤ31から入力されるモータMG1からの動力を統合してリングギヤ32側に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構60およびデファレンシャルギヤ61を介して、最終的には前輪62a,62bに出力される。
【0023】
モータMG1,MG2,MG3は、いずれも発電機として駆動できると共に電動機として駆動できるロータに永久磁石が取り付けられた周知のPM型の同期発電電動機として構成されており、インバータ41,42,43を介してバッテリ50と電力のやりとりを行なう。インバータ41,42,43とバッテリ50とを接続する電力ライン54は、各インバータ41,42,43が共用する正極母線および負極母線として構成されており、モータMG1,MG2,MG3のいずれかで発電される電力を他のモータで消費することができるようになっている。したがって、バッテリ50は、モータMG1,MG2,MG3のいずれかから生じた電力や不足する電力により充放電されることになる。なお、モータMG1,MG2,MG3により電力収支のバランスをとるものとすれば、バッテリ50は充放電されない。モータMG1,MG2,MG3は、いずれもモータ用電子制御ユニット(以下、モータECUという)40により駆動制御されている。モータECU40には、モータMG1,MG2,MG3を駆動制御するために必要な信号、例えばモータMG1,MG2,MG3の回転子の回転位置を検出する回転位置検出センサ44,45,46からの信号や図示しない電流センサにより検出されるモータMG1,MG2,MG3に印加される相電流などが入力されており、モータECU40からは、インバータ41,42,43へのスイッチング制御信号が出力されている。モータECU40は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によってモータMG1,MG2,MG3を駆動制御すると共に必要に応じてモータMG1,MG2,MG3の運転状態に関するデータをハイブリッド用電子制御ユニット70に出力する。
【0024】
バッテリ50は、バッテリ用電子制御ユニット(以下、バッテリECUという)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧,バッテリ50の出力端子に接続された電力ライン54に取り付けられた図示しない電流センサからの充放電電流,バッテリ50に取り付けられた図示しない温度センサからの電池温度などが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッド用電子制御ユニット70に出力する。なお、バッテリECU52では、バッテリ50を管理するために電流センサにより検出された充放電電流の積算値に基づいて残容量(SOC)も演算している。
【0025】
前輪62a,62bおよび後輪64a,64bの各車輪には、ブレーキアクチュエータ68からの油圧により作動する油圧ブレーキが取り付けられている。ブレーキアクチュエータ68からの油圧の調節は、ブレーキ用電子制御ユニット(以下、ブレーキECUという)69による駆動制御により行なわれている。このブレーキECU69には、車輪速センサ69aにより検出される前輪62a,62bの車輪速Vfl,Vfr,後輪64a,64bの車輪速Vrl,Vrrが図示しない入力ポートを介して入力されており、ブレーキECU69からはブレーキアクチュエータ68への駆動信号などが出力ポートを介して出力されている。なお、ブレーキECU69は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によりブレーキアクチュエータ68を駆動制御すると共に必要に応じてブレーキアクチュエータ68の状態や前輪62a,62bおよび後輪64a,64bの状態に関するデータをハイブリッド用電子制御ユニット70に出力する。
【0026】
ハイブリッド用電子制御ユニット70は、CPU72を中心とするマイクロプロセッサとして構成されており、CPU72の他に処理プログラムを記憶するROM74と、データを一時的に記憶するRAM76と、図示しない入出力ポートおよび通信ポートとを備える。ハイブリッド用電子制御ユニット70には、イグニッションスイッチ80からのイグニッション信号,シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,車速センサ88からの車速V,勾配センサ89からの路面勾配θなどが入力ポートを介して入力されている。ハイブリッド用電子制御ユニット70は、前述したように、エンジンECU24やモータECU40,バッテリECU52,ブレーキECU69と通信ポートを介して接続されており、エンジンECU24やモータECU40,バッテリECU52,ブレーキECU69と各種制御信号やデータのやりとりを行なっている。
【0027】
こうして構成された実施例のハイブリッド自動車20は、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて車両に出力すべき要求トルクを計算し、この要求トルクに対応する要求動力により走行するように、エンジン22とモータMG1,MG2,MG3とが運転制御される。エンジン22とモータMG1,MG2,MG3の運転制御としては、要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが動力分配統合機構30とモータMG1とモータMG2およびモータMG3のいずれか又は両方とによってトルク変換されて出力されるようモータMG1とモータMG2とモータMG3とを駆動制御するトルク変換運転モードや、要求動力とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が動力分配統合機構30とモータMG1とモータMG2およびモータMG3のいずれか又は両方とによるトルク変換を伴って要求動力が出力されるようモータMG1とモータMG2とモータMG3とを駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG2およびモータMG3のいずれか又は両方から要求動力に見合う動力がに出力されるよう運転制御するモータ運転モードなどがある。
【0028】
次に、こうして構成された実施例のハイブリッド自動車20の動作、特にエンジン22の運転を停止した状態でリバース走行しているときにインバータ41のいずれかの相に短絡故障が生じたときの動作について説明する。図2は、エンジン22の運転を停止した状態でリバース走行するときにハイブリッド用電子制御ユニット70により実行されるリバース走行時制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば、数msec毎)に繰り返し実行される。
【0029】
リバース走行時制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3,インバータ異常フラグFinv1,バッテリ50の出力制限Wout,後輪分配比Drなどの制御に必要なデータを入力する(ステップS100)。ここで、モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3は、回転位置検出センサ44,45,46により検出される回転位置に基づいて各々演算されたものをモータECU40から通信により入力するものとした。また、インバータ異常フラグFinv1は、インバータ41のいずれかの相に短絡故障が生じているか否かを表わすフラグであり、図示しないインバータ異常判定処理により、インバータ41の各相の電流を監視し、いずれかの相に過電流が生じたときにその相が短絡故障が生じたとして値1が設定されてRAM76の所定領域に格納されたものを読み込むことによって入力するものとした。さらに、バッテリ50の出力制限Woutは、バッテリ50に取り付けられた図示しない温度センサにより検出されたバッテリ50の電池温度Tbとバッテリ50の残容量(SOC)とに基づいて設定されたものをバッテリECU52から通信により入力するものとした。なお、バッテリ50の出力制限Woutは、電池温度Tbに基づいて出力制限Woutの基本値を設定し、バッテリ50の残容量(SOC)に基づいて出力制限用補正係数を設定し、設定した出力制限Woutの基本値に補正係数を乗じることにより設定することができる。後輪分配比Drは、前輪62a,62b側に出力するトルクと後輪64a,64b側に出力するトルクとの和に対する後輪64a,64b側に出力するトルクの割合を示すものとして図示しない後輪分配比設定処理により設定されたものをブレーキECU69から通信により入力するものとした。なお、実施例の後輪分配比設定処理では、後輪分配比Drは、車速Vや後述する図2のステップS110で設定される要求トルクT*(制動時には制動力としてのトルク),車輪速センサ69aからの車輪速Vfl,Vfr,Vrl,Vrr等に基づいてスリップが発生しているか否か、発進時あるいは急加速時か否か、減速走行時か否かを判定し、いずれでもないと判定したときには値0を、スリップが発生していると判定したときにはスリップ時用の値を、発進時あるいは急加速時と判定したときには発進・急加速時用の値を、減速走行時と判定したときには減速走行時用の値を、それぞれ設定することにより行なわれる。
【0030】
続いて、入力したアクセル開度Accと車速Vとに基づいて車両全体に要求される要求トルクT*を設定する(ステップS110)。要求トルクT*は、実施例では、アクセル開度Accと車速Vと要求トルクT*との関係を予め求めて要求トルク設定用マップとしてROM74に記憶しておき、アクセル開度Accと車速Vとが与えられるとマップから対応する要求トルクT*を導出することにより設定するものとした。要求トルク設定用マップの一例を図3に示す。
【0031】
次に、次式(1),(2)により、値1から後輪分配比Drを減じたものに要求トルクT*を乗じて得られるトルクを前輪トルクTf*として設定すると共に後輪分配比Drに要求トルクT*を乗じて得られるトルクを後輪トルクTr*として設定し(ステップS120)、モータMG1のトルク指令Tm1*に値0を設定する(ステップS130)。このルーチンではエンジン22の運転を停止した状態でリバース走行する場合を考えているから、エンジン22の運転は停止しており、モータMG1はトルクを発生させないためにトルク指令Tm1*として値0が設定されるのである。
【0032】
Tf*=(1-Dr)×T* (1)
Tr*=Dr×T* (2)
【0033】
こうして前輪トルクTf*と後輪トルクTr*とを設定すると、インバータ異常フラグFinv1の値を調べ(ステップS140)、インバータ異常フラグFinv1が値0のとき、即ち、インバータ41に短絡故障が生じていないときには、モータMG2,MG3の回転数Nm2,Nm3に基づいてこの回転数Nm2,Nm3のときにモータMG2,MG3から出力可能なトルクの最大値としてのモータMG2,MG3の定格トルクTm2lim,Tm3limを導出すると共に(ステップS150)、次式(3),(4)によりバッテリ50の出力制限Woutに対して後輪分配比Drを適用して前輪側,後輪側に対する出力制限をモータMG2,MG3の回転数Nm2,Nm3で除して得られるトルクを上限制限Tm2max,Tm3maxとして計算して設定し(ステップS160)、式(5),(6)によりモータMG2,MG3から本来出力すべきトルクとして前輪トルクTf*,後輪トルクTr*をギヤ比G2,G3で除したものと導出した定格トルクTm2lim,Tm3limと設定した上限制限Tm2max,Tm3maxのうち最も小さいものを得てモータMG2,MG3のトルク指令Tm2*,Tm3*として設定する(ステップS170)。ここで、定格トルクTm2lim,Tm3limの導出は、実施例では、モータMG2,MG3の回転数Nm2,Nm3とモータMG2,MG3の定格トルクTm2lim,Tm3limとの関係を予め定格トルク設定用マップとしてROM74に記憶しておき、モータMG2,MG3の回転数Nm2,Nm3が与えられるとマップから対応する定格トルクTm2lim,Tm3limを導出することにより行なうものとした。モータの定格トルクの一例を図4に示す。
【0034】
Tm2max=(1-Dr)×Wout÷Nm2 (3)
Tm3max=Dr×Wout÷Nm3 (4)
Tm2*=min(Tf*/G2,Tm2lim,Tm2max) (5)
Tm3*=min(Tf*/G3,Tm3lim,Tm3max) (6)
【0035】
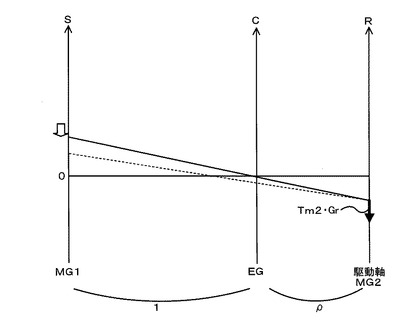
こうしてモータMG1,MG2,MG3のトルク指令Tm1*,Tm2*,Tm3*を設定すると、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信して(ステップS200)、本ルーチンを終了する。トルク指令Tm1*,Tm2*,Tm3*を受信したモータECU40は、トルク指令Tm1*のトルク(即ち値0)がモータMG1から出力されると共にトルク指令Tm2*のトルクがモータMG2から出力され、トルク指令Tm3*のトルクがモータMG3から出力されるようインバータ41,42,43のスイッチング素子のスイッチング制御を行なう。これにより、モータMG2とモータMG3とからのトルクによって車両を走行させることができる。エンジン22の運転を停止してリバース走行しているときの動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図を図5に示す。図中、左のS軸はモータMG1の回転数Nm1であるサンギヤ31の回転数を示し、C軸はエンジン22の回転数Neであるキャリア34の回転数を示し、R軸はモータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで除したリングギヤ32の回転数Nrを示す。また、図中、実線はインバータ異常フラグFinv1が値0のときのリバース走行の状態を示し、破線はインバータ異常フラグFinv1が値1のときのリバース走行の状態を示す。実線におけるR軸上の太線矢印はモータMG2から出力されるトルクTm2が減速ギヤ35を介してリングギヤ軸32aに作用するトルクを示し、S軸上の白抜き矢印はインバータ41に短絡故障が生じたときにモータMG1の誘導起電力により生じるトルクを示す。
【0036】
ステップS140でインバータ異常フラグFinv1が値1であると判定されると、インバータ41のいずれかの相に短絡故障が生じていると判断し、モータMG2,MG3のトルク指令Tm2*,Tm3*に値0を設定して(ステップS180)、リバース走行を禁止し(ステップS190)、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信して(ステップS200)、本ルーチンを終了する。インバータ41のいずれかの相に短絡故障が生じた状態でモータMG2,MG3から同様にトルクを出力してリバース走行すると、上述した図5の白抜き矢印に示すように、モータMG1が連れ回されるためにモータMG1の誘導起電力により生じるトルクにより、エンジン22は逆回転してしまう。実施例では、このエンジン22の逆回転が継続されるのを抑止するために、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定し、リバース走行を禁止するのである。即ち、上述の制御は、エンジン22の運転を停止した状態でリバース走行しているときにモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してインバータ42,43のスイッチング素子をスイッチング制御することにより、リバース走行を中止し、リバース走行を禁止する制御となる。こうした制御により、モータMG1のインバータ41に短絡故障が生じると、車両はリバース走行を終了して停車することになる。したがって、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止することにより、モータMG1の誘導起電圧によって生じるトルクにより若干のエンジン22の逆回転が生じるものの、エンジン22が継続して逆回転するのは抑止することができる。
【0037】
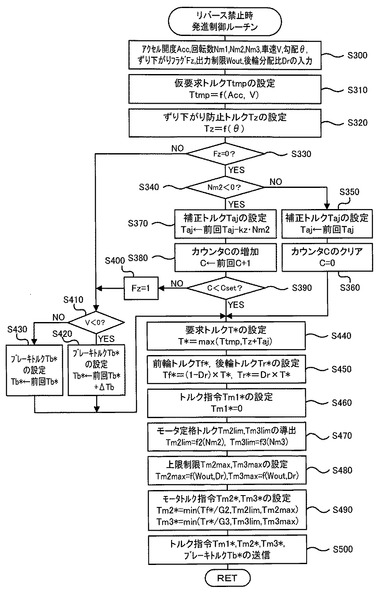
次に、実施例のハイブリッド自動車20において、モータMG1を駆動するインバータ41に短絡故障が生じて停車している車両を発進させるときの動作について説明する。図6は、ハイブリッド用電子制御ユニット70により実行されるリバース禁止時発進制御ルーチンの一例を示すフローチャートである。このルーチンは、モータMG1を駆動するインバータ41に短絡故障が生じている最中にシフトレバー81が前進走行用のドライブポジションに操作されて車両を発進させる際に所定時間毎(例えば、数msec毎)に繰り返し実行される。
【0038】
リバース禁止時発進制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3,勾配センサ89からの路面勾配θ,ずり下がりフラグFz,バッテリ50の出力制限Wout,後輪分配比Drなどの制御に必要なデータを入力する(ステップS300)。ここで、ずり下がりフラグFzは、登り勾配で車両がずり下がっているときに値1が設定されるものであり、このルーチンで設定されてRAM76の所定領域に格納されたものを読み出すことにより入力するものとした。なお、モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3やバッテリ50の出力制限Wout,後輪分配比Drについては上述した。
【0039】
続いて、入力したアクセル開度Accと車速Vと図3の要求トルク設定用マップとを用いて車両全体に要求されるトルクの仮の値としての仮要求トルクTtmpを設定し(ステップS310)、路面勾配θに基づいて車両がずり下がらないようにするためのトルクとしてのずり下がり防止トルクTzを設定する(ステップS320)。ここで、ずり下がり防止トルクTzは、車両総重量をMとするとM・sinθにより計算することができる。この場合の車両総重量としては、重量センサを備える車両であれば重量センサにより検出される値を用いるものとしたり、重量センサを備えない車両であれば、例えば製品規格としての総重量を用いるものとしたり、乗員数に応じた総重量を用いるものとしたりすることができる。なお、平坦路では、路面勾配θが値0となるため、ずり下がり防止トルクTzには値0が設定される。
【0040】
そして、ずり下がりフラグFzの値を調べ(ステップS330)、ずり下がりフラグFzが値0のとき、即ち、車両がずり下がっていないときには、モータMG2の回転数Nm2が負の値であるか否か、即ち、車両がずり下がって後進しているか否かを判定する(ステップS340)。モータMG2の回転数Nm2が負の値ではないときには、車両はずり下がっていないと判断し、補正トルクTajとして前回の値を設定すると共に(ステップS350)、カウンタCを値0にクリアする(ステップS360)。ここで、補正トルクTajは、車両にずり下がりが生じているときにずり下がり防止トルクTzを補正するためのものであり、初期値として値0が設定されている。したがって、平坦路では、車両にずり下がりは生じないので値0が補正トルクTajに設定されることになる。また、カウンタCは、車両のずり下がりを複数回の検出により判定するためのカウンタである。補正トルクTajとカウンタCについては、ステップS340の判定でモータMG2の回転数Nm2が負の値であると判定されたときの処理(ステップS370〜S390)を説明するときに更に後述する。
【0041】
そして、ずり下がり防止トルクTzと補正トルクTajとの和のトルクと仮要求トルクTtmpとのうち大きい方を要求トルクT*として設定し(ステップS440)、上述した式(1),(2)により、前輪トルクTf*と後輪トルクTr*とを設定すると共に(ステップS450)、モータMG1のトルク指令Tm1*に値0を設定し(ステップS460)。上述した図2のリバース走行時制御ルーチンのステップS150〜ステップS170と同一の処理によりモータMG2,MG3のトルク指令Tm2*,Tm3*を設定し(ステップS470〜S490)、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信すると共に油圧ブレーキとして作用させるトルクとしてのブレーキトルクTb*をブレーキECU69に送信して(ステップS500)、本ルーチンを終了する。ここで、ブレーキトルクTb*は、油圧ブレーキにより車両に作用させるべきトルクとして設定されるものであり、このルーチンでまだ説明していないステップS410〜S430により設定されるものである。ブレーキトルクTb*は、実施例では初期値として値0が設定されているから、ステップS410〜S430によって新たな値が設定されるまでは値0が設定されている。上述したように、平坦路では、ずり下がり防止トルクTzにも補正トルクTajにも値0が設定されるから、仮要求トルクTtmpがそのまま要求トルクT*として設定され、これを後輪分配比Drを用いて定格トルクTm2lim,Tm3limの範囲内で且つバッテリ50の出力制限Woutから設定される上限制限Tm2max,Tm3maxの範囲内でモータMG2,MG3のトルク指令Tm2*,Tm3*が設定されて発進する。
【0042】
一方、ステップS340でモータMG2の回転数Nm2が負の値であると判定されたときには、車両にずり下がりが生じていると判断し、前回の補正トルクTajから回転数Nm2にゲインkzを乗じたものを減じて新たな補正トルクTajを設定すると共に(ステップS370)、カウンタCを値1だけインクリメントし(ステップS380)、カウンタCが閾値Cset未満であるか否かを判定し(ステップS390)、カウンタCが閾値Cset未満であるときには、上述したステップS440〜S490の処理によりモータMG1,MG2,MG3のトルク指令Tm1*,Tm2*,Tm3*を設定し、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信すると共にブレーキトルクTb*をブレーキECU69に送信して(ステップS500)、本ルーチンを終了する。ここで、ゲインkzは、モータMG2の回転数Nm2に応じて補正トルクTajを増加させるためのものであり、このルーチンの実行頻度や車両重量などにより定めることができる。このように車両にずり下がりが生じているときには、ずり下がりの程度を表わすモータMG2の回転数Nm2に応じた補正トルクTajを設定し、この補正トルクTajとずり下がり防止トルクTzとの和のトルクと仮要求トルクTtmpとのうち大きい方を要求トルクT*に設定し、これを後輪分配比Drを用いて定格トルクTm2lim,Tm3limの範囲内で且つバッテリ50の出力制限Woutから設定される上限制限Tm2max,Tm3maxの範囲内でモータMG2,MG3のトルク指令Tm2*,Tm3*を設定して、モータMG1,MG2,MG3を制御する。路面勾配θに対してアクセルペダル83の踏み込み量が大きいときには大きな仮要求トルクTtmpが設定されるから、仮要求トルクTtmpが要求トルクT*として設定され、前輪トルクTf*や後輪トルクTr*が定格トルクTm2lim,Tm3limや上限制限Tm2max,Tm3maxによって制限されないときには、車両のずり下がりは終了する。路面勾配θに対してアクセルペダル83の踏み込み量が小さいときには小さな仮要求トルクTtmpが設定されるから、補正トルクTajとずり下がり防止トルクTzとの和が要求トルクT*として設定され、車両総重量Mが実際の総重量より必要以上に大きいときや前輪トルクTf*や後輪トルクTr*が定格トルクTm2lim,Tm3limや上限制限Tm2max,Tm3maxによって制限されないときには、車両のずり下がりは終了する。車両のずり下がりが終了した後にこのルーチンが実行されると、ステップS340ではモータMG2の回転数Nm2が負の値ではないと判定され、前回の補正トルクTaj、即ち、モータMG2の回転数Nm2が負の値であると判定されたときに設定された補正トルクTajを用いて要求トルクT*が設定されるから、路面勾配θに対してアクセルペダル83の踏み込み量が大きくなったときに車両は発進することになる。
【0043】
路面勾配θに対してアクセルペダル83の踏み込み量が大きくても前輪トルクTf*や後輪トルクTr*が定格トルクTm2lim,Tm3limや上限制限Tm2max,Tm3maxによって制限されることにより車両のずり下がりが終了しないときや、路面勾配θに対してアクセルペダル83の踏み込み量が小さいために補正トルクTajとずり下がり防止トルクTzとの和のトルクが要求トルクT*として設定されても車両総重量Mより実際の総重量の方が大きかったり要求トルクT*から得られる前輪トルクTf*や後輪トルクTr*が定格トルクTm2lim,Tm3limや上限制限Tm2max,Tm3maxによって制限されることにより車両のずり下がりが終了しないときには、ステップS340ではモータMG2の回転数Nm2が負の値であると判定され、カウンタCが閾値Csetに至るまで前回の補正トルクTajからそのときの回転数Nm2にゲインkzを乗じたものを減じて新たな補正トルクTajを設定すると共にこの補正トルクTajを用いて要求トルクT*を設定して、モータMG1,MG2,MG3を制御する処理(ステップS370〜S390,S440〜S500)を繰り返す。そして、カウンタCが閾値Csetに至ると、ずり下がりフラグFzに値1を設定し(ステップS400)、車速Vが負の値であるか否かを判定し(ステップS410)、車速Vが負の値であるときには油圧ブレーキに作用させるブレーキトルクTb*として前回のブレーキトルクTb*に所定トルクΔTbだけ加えたものを設定し(ステップS420)、車速Vが負の値ではないときにはブレーキトルクTb*として前回のブレーキトルクTb*を設定して(ステップS430)、上述したステップS440〜S500の処理を実行して本ルーチンを終了する。ブレーキトルクTb*がブレーキECU69に送信されると、ブレーキECU69は、ブレーキを作用させるための後輪分配比Dbを用いてブレーキトルクTb*を前輪ブレーキトルクTbfと後輪ブレーキトルクTbrとに分配し、この前輪ブレーキトルクTbfと後輪ブレーキトルクTbrとに基づいてブレーキアクチュエータ68からの油圧を調整し、前輪62a,62bおよび後輪64a,64bに制動力を作用させる。こうした処理により、ずり下がりフラグFzに値1が設定されると、次回以降にこのルーチンが実行されると、ステップS330ではずり下がりフラグFzは値1であると判定され、車速Vが負の値ではなくなるまで、即ち、車両のずり下がりが終了するまでブレーキトルクTb*を所定トルクΔTbだけ大きくすると共に(S410〜S430)、上述したステップS440〜S500の処理を繰り返す。この制御により、車両のずり下がりは、いずれ終了する。
【0044】
ステップS340でモータMG2の回転数Nm2が負の値であると判定されたり、ずり下がりフラグFzに値1が設定されてブレーキトルクTb*により車速Vが負の値ではなくなるまでは、車両にはずり下がりが生じる。このとき、モータMG1を駆動するインバータ41には短絡故障が生じており、エンジン22の運転は停止されているから、モータMG1は図5の共線図では値0より上側に回転する。このとき、モータMG1には誘導起電力により図中下向き(白抜き矢印の方向)のトルクが生じるが、モータMG1の回転数Nm1が小さいことから、誘導起電力により生じるトルクも小さいために、エンジン22の逆回転は生じない。
【0045】
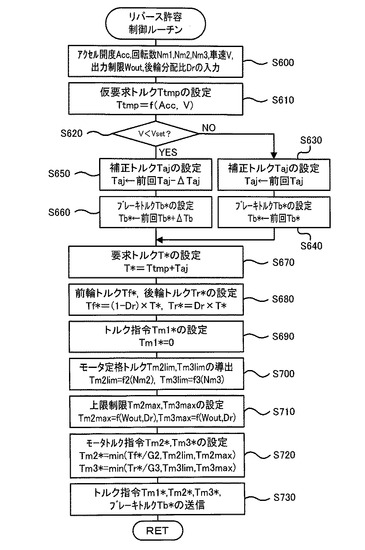
次に、実施例のハイブリッド自動車20において、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときのリバース走行するときの動作について説明する。図7は、ハイブリッド用電子制御ユニット70により実行されるリバース許容制御ルーチンの一例を示すフローチャートである。このルーチンは、モータMG1を駆動するインバータ41に短絡故障が生じている最中にシフトレバー81がリバース走行用のポジションに操作された際に所定時間毎(例えば、数msec毎)に繰り返し実行される。なお、リバース走行を許容しなければならないときとしては、退避走行の必要からリバース走行しなければならないときや、エンジン22の運転を停止した状態でリバース走行しているときにインバータ41のいずれかの相に短絡故障が生じたことによりモータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止したが、登坂路であるために停車後に車両にずり下がりが生じ、このずり下がりを抑止できないときなどを挙げることができる。
【0046】
リバース許容制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3,後輪分配比Drなどの制御に必要なデータを入力すると共に(ステップS600)、入力したアクセル開度Accと車速Vと図3の要求トルク設定用マップとを用いて車両全体に要求されるトルクの仮の値としての仮要求トルクTtmpを設定し(ステップS610)、車速Vが負の値に設定された閾値Vset未満であるか否かを判定する(ステップS620)。ここで、閾値Vsetは、車両が後進する際にモータMG1の誘導起電力によるトルクによってエンジン22が逆回転したときに車両に共振が生じるエンジン22の回転数帯より小さな回転数でエンジン22が逆回転するときの車速として設定されるものであり、例えば、共振周波数帯としてエンジン22の回転数が300〜600rpmなどを用い、3km/hや5km/hなどを用いることができる。
【0047】
車速Vが閾値Vset以上のとき、即ち、車速Vの絶対値が閾値Vsetの絶対値より小さいときには、補正トルクTajとして前回の補正トルクTajを設定すると共に(ステップS630)、ブレーキトルクTb*として前回のブレーキトルクTb*を設定し(ステップS640)、仮要求トルクTtmpに補正トルクTajを加えたものを要求トルクT*として設定し(ステップS670)、要求トルクT*と後輪分配比Drとに基づいて上述の式(1),(2)に基づいて前輪トルクTf*,後輪トルクTr*を設定し(ステップS680)、図6のリバース禁止時発進制御ルーチンにおけるステップS460〜S490と同一の処理によりモータMG1,MG2,MG3のトルク指令Tm1*,Tm2*,Tm3*を設定し(ステップS690〜S720)、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信すると共にブレーキトルクTb*をブレーキECU69に送信して(ステップS730)、本ルーチンを終了する。ここで、補正トルクTajとブレーキトルクTb*とには、実施例では、このルーチンが初めて実行されるときに初期値として値0が設定されている。
【0048】
一方、ステップS620で車速Vが閾値Vset未満、即ち、車速Vの絶対値が閾値Vsetの絶対値より大きいと判定されたときには、前回の補正トルクTajから所定トルクΔTajを減じた値を新たな補正トルクTajに設定すると共に(ステップS650)、前回のブレーキトルクTb*に所定トルクΔTbを加えた値を新たなブレーキトルクTb*として設定し(ステップS660)、ステップS670〜S730の処理を実行して本ルーチンを終了する。こうした制御により、車速Vが閾値Vset以上の範囲内でリバース走行を許容することができる。このとき、モータMG1には誘導起電力により図5中下向き(白抜き矢印の方向)のトルクが生じ、このトルクのためにエンジン22の逆回転が生じるが、車両に共振が生じる回転数帯より小さな回転数でエンジン22が逆回転するから、車両の共振は抑制することができる。
【0049】
以上説明した実施例のハイブリッド自動車20によれば、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止することにより、モータMG1の誘導起電圧によって生じるトルクにより若干のエンジン22の逆回転が生じるものの、エンジン22が継続して逆回転するのを抑止することができる。
【0050】
また、実施例のハイブリッド自動車20によれば、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときは、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御するから、車両の発進時に車両がずり下がることによってエンジン22が逆回転するのを抑制することができる。しかも、ずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定では車両のずり下がりを抑止できないときには、車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動することにより車両のずり下がりを抑止するから、より確実に車両のずり下がりを抑止することができる。この結果、車両の発進時に車両がずり下がることによってエンジン22が逆回転するのをよく確実に抑制することができる。
【0051】
さらに、実施例のハイブリッド自動車20によれば、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動させることにより、車両を閾値Vset以上の車速でリバース走行することができる。この結果、エンジン22の逆回転は生じるものの、エンジン22の逆回転による車両の共振は抑制した状態でリバース走行することができる。
【0052】
実施例のハイブリッド自動車20では、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときには、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御するものとしたが、モータMG2の回転数Nm2に代えて車速Vが負の値とならないように要求トルクT*を設定するものとしてもよいし、エンジン22の逆回転が抑止できればよいから、エンジン22の回転数Neが負の値とならないように要求トルクT*を設定するものとしてもよいし、モータMG1の回転数Nm1が正の値とならないように要求トルクT*を設定するものとしてもよい。もとより、モータMG3の回転数Nm3が負の値とならないように要求トルクT*を設定するものとしてもよい。
【0053】
実施例のハイブリッド自動車20では、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときに、ずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定では車両のずり下がりを抑止できないときには、車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動することにより車両のずり下がりを抑止するものとしたが、車速Vに代えてモータMG2の回転数Nm2が負の値とならないようにブレーキトルクTb*を設定するものとしてもよいし、エンジン22の逆回転が抑止できればよいから、エンジン22の回転数Neが負の値とならないようにブレーキトルクTb*を設定するものとしてもよいし、モータMG1の回転数Nm1が正の値とならないようにブレーキトルクTb*を設定するものとしてもよい。もとより、モータMG3の回転数Nm3が負の値とならないようにブレーキトルクTb*を設定するものとしてもよい。
【0054】
実施例のハイブリッド自動車20では、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときには、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御し、カウンタCが閾値Csetに至ってずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定では車両のずり下がりを抑止できないと判定したときに、車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動することにより車両のずり下がりを抑止するものとしたが、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときには、アクセル開度Accに応じた要求トルクT*を設定してモータMG2,MG3を駆動制御すると共に路面勾配θに応じて車両のずり下がりを防止するためのブレーキトルクTb*を設定して油圧ブレーキを制御するものとしてもよく、アクセル開度Accに応じた要求トルクT*を設定してモータMG2,MG3を駆動制御すると共にモータMG2の回転数Nm2が負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを制御するものとしてもよい。
【0055】
実施例のハイブリッド自動車20では、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動するものとしたが、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときには、油圧ブレーキを用いることなく、車速Vが閾値Vset以上となるように補正トルクTajを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御するものとしてもよいし、アクセル開度Accと車速Vとに応じた要求トルクT*を補正することなく、車速Vが閾値Vset以上となるようにブレーキトルクTb*を設定し、要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動するものとしてもよい。
【0056】
実施例のハイブリッド自動車20では、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止すると共にリバース走行を禁止し、この状態から車両を発進させるときは、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御し、このとき車両のずり下がりが生じると、車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動することにより車両のずり下がりを抑止するものとしたが、モータMG1を駆動するインバータ41に短絡故障が生じたことによりリバース走行を禁止したときには、車両の発進も禁止するものとしてもよい。
【0057】
実施例のハイブリッド自動車20では、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止すると共にリバース走行を禁止し、この状態でリバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動するものとしたが、モータMG1を駆動するインバータ41に短絡故障が生じたことによりリバース走行を禁止したときには、如何なるときでもリバース走行を許容しないものとしてもよい。
【0058】
実施例のハイブリッド自動車20では、エンジン22と動力分配統合機構30とモータMG1,MG2とを前輪62a,62b側に接続し、モータMG3を後輪64a,64b側に接続したが、エンジン22と動力分配統合機構30とモータMG1,MG2とを後輪64a,64b側に接続し、モータMG3を前輪62a,62b側に接続するものとしてもよい。
【0059】
実施例のハイブリッド自動車20では、エンジン22と動力分配統合機構30とモータMG1,MG2とを前輪62a,62b側に接続し、モータMG3を後輪64a,64b側に接続したが、後輪64a,64bの各々にインホイールモータを取り付けるものとしてもよいし、後輪64a,64bにはモータを取り付けないものとしても構わない。更に、図8のハイブリッド自動車120に例示するように、モータMG2を備えないものとしても構わない。
【0060】
また、こうしたハイブリッド自動車に適用するものに限定されるものではなく、エンジン22やバッテリ50と共にハイブリッド自動車に搭載される駆動装置の形態としてもよく、また、ハイブリッド自動車の制御方法の形態としても構わない。
【0061】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、エンジン22が「内燃機関」に相当し、モータMG1が「同期電動発電機」に相当し、動力分配統合機構30が「遊星歯車機構」に相当し、モータMG2,MG3が「電動機」に相当し、インバータ41が「インバータ」に相当し、インバータ42,43が「駆動回路」に相当し、バッテリ50が「蓄電手段」に相当し、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときにはモータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してモータECU40に送信してリバース走行を中止すると共にリバース走行を禁止する図2のリバース走行時制御ルーチンを実行し、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときは、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定すると共に要求トルクT*を用いてモータMG2,MG3のトルク指令Tm2*,Tm3*を設定してモータECU40に送信し、ずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定によっては車両のずり下がりを抑止できないときには、車速Vが負の値とならないようにブレーキトルクTb*を設定してブレーキECU69に送信する図6のリバース禁止時発進制御ルーチンを実行し、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3のトルク指令Tm2*,Tm3*を設定してモータECU40に送信すると共にブレーキトルクTb*をブレーキECU69に送信する図7のリバース許容制御ルーチンを実行する、ハイブリッド用電子制御ユニット70と、トルク指令Tm2*,Tm3*を受信してモータMG2,MG3の駆動回路としてのインバータ42,43を制御するモータECU40と、ブレーキトルクTb*を受信してブレーキアクチュエータ68を制御するブレーキECU69とが「制御手段」に相当する。
【0062】
ここで、「内燃機関」としては、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関に限定されるものではなく、水素エンジンなど如何なるタイプの内燃機関であっても構わない。「同期電動発電機」としては、回転に伴って誘導起電圧を発生する発電機であれば如何なる発電機であっても構わない。「遊星歯車機構」としては、上述の動力分配統合機構30に限定されるものではなく、ダブルピニオン式の遊星歯車機構を用いるものや複数の遊星歯車機構を組み合わせて4以上の軸に接続されるものなど、1つ以上の遊星歯車を備えるものであれば如何なるものとしても構わない。「電動機」としては、同期発電電動機として構成されたモータMG2,MG3に限定されるものではなく、誘導電動機など、駆動軸に動力を入出力可能なものであれば如何なるタイプの電動機であっても構わない。また、少なくとも一つの電動機であるため、三つ以上の電動機としてもよく、単一の電動機としてもよい。「蓄電手段」としては、二次電池としてのバッテリ50に限定されるものではなく、キャパシタなど、発電機と電力のやりとりが可能であれば如何なるものとしても構わない。「制御手段」としては、ハイブリッド用電子制御ユニット70とモータECU40とブレーキECU69とからなる組み合わせに限定されるものではなく単一の電子制御ユニットにより構成されるなどとしてもよい。また、「制御手段」としては、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときにはモータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止すると共にリバース走行を禁止し、この状態で車両を発進させるときは路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御すると共にずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定によっては車両のずり下がりを抑止できないときには車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動し、リバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定して補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動するものに限定されるものではなく、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときにはモータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止すると共にリバース走行を禁止し、この状態での車両の発進も禁止したり、リバース走行を許容しないものとするなど、内燃機関の運転を停止してリバース走行しているときにインバータに短絡故障が生じたときには電動機から出力するトルクを値0としてリバース走行が禁止されるよう駆動回路を制御するものであれば如何なるものとしても構わない。
【0063】
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0064】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0065】
本発明は、ハイブリッド自動車の製造産業などに利用可能である。
【符号の説明】
【0066】
20,120 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30 動力分配統合機構、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、33 ピニオンギヤ、34 キャリア、35 減速ギヤ、40 モータ用電子制御ユニット(モータECU)、41,42,43 インバータ、44,45,46 回転位置検出センサ、50 バッテリ、52 バッテリ用電子制御ユニット(バッテリECU)、54 電力ライン、60 ギヤ機構、61,63 デファレンシャルギヤ、62a,62b 前輪、64a,64b 後輪、68 ブレーキアクチュエータ、69 ブレーキECU、69a 車輪速センサ、70 ハイブリッド用電子制御ユニット、72 CPU、74 ROM、76 RAM、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、89 勾配センサ、MG1,MG2,MG3 モータ。
【技術分野】
【0001】
本発明は、ハイブリッド自動車およびその制御方法並びに駆動装置に関し、詳しくは、内燃機関と、動力を入出力可能な同期電動発電機と、内燃機関の出力軸と発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で回転軸,出力軸,駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、同期電動発電機を駆動するインバータと、電動機を駆動する駆動回路と、インバータおよび駆動回路に接続されて同期電動発電機および電動機と電力のやりとりが可能な蓄電手段と、内燃機関の間欠運転を伴って走行に要求される要求駆動力により走行するよう内燃機関とインバータと駆動回路とを制御する制御手段と、を備えるハイブリッド自動車、および、こうしたハイブリッド自動車におけるインバータに短絡故障が生じたときのハイブリッド自動車の制御方法、並びに、こうしたハイブリッド自動車に内燃機関および蓄電手段と共に搭載される駆動装置に関する。
【背景技術】
【0002】
従来、この種のハイブリッド自動車としては、エンジンと、発電機と、エンジンのクランクシャフトと発電機の回転軸と後輪に連結されたプロペラシャフトとにキャリアとサンギヤとリングギヤとが各々接続された遊星歯車機構と、プロペラシャフトに2段変速の変速機を介して取り付けられた走行モータと、発電機を駆動する発電機用インバータと、走行モータを駆動する走行モータ用インバータと、発電機用インバータおよび走行モータ用インバータに接続された直流電源と、を備え、発電機用インバータと走行モータ用インバータのうちの一方のインバータに過電流が発生したときには過電流が発生したインバータの駆動を停止すると共に過電流が発生していないインバータを駆動することにより発電機または走行モータを駆動するものが提案されている(例えば、特許文献1参照)。このハイブリッド自動車では、一方のインバータに過電流が生じたときでも他方のインバータを駆動することにより、車両の安全な退避走行を有効に行なえるようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−245372号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のハイブリッド自動車では、発電機用インバータに短絡故障が生じたときに、エンジンを停止した状態で走行モータ用インバータを駆動して走行モータによりリバース走行すると、遊星歯車機構の特性により発電機が回転し、発電機の回転に伴って発電機に生じる誘導起電力によってエンジンが逆回転する場合が生じる。特に吸気、圧縮、膨張、排気の4行程により動力を出力する4サイクルエンジンでは、一方向にのみ回転するよう設計されているため、逆回転すると、排気を吸気側に送ることになり、好ましくない。また、退避走行などのためにエンジンの逆回転を許容するものとしても、エンジンの逆回転による振動に車両が共振する場合は回避されることが望まれる。
【0005】
本発明のハイブリッド自動車およびその制御方法並びに駆動装置は、内燃機関の運転を停止してリバース走行している最中に発電機を駆動するインバータに短絡故障が生じたとに内燃機関が逆回転するのを抑制することを主目的とし、発電機を駆動するインバータに短絡故障が生じている最中に内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには内燃機関の逆回転による振動の影響を抑制することを目的の一つとする。
【課題を解決するための手段】
【0006】
本発明のハイブリッド自動車およびその制御方法並びに駆動装置は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明のハイブリッド自動車は、
内燃機関と、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記同期電動発電機を駆動するインバータと、前記電動機を駆動する駆動回路と、前記インバータおよび前記駆動回路に接続されて前記同期電動発電機および前記電動機と電力のやりとりが可能な蓄電手段と、を備えるハイブリッド自動車であって、
前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときには、前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する制御手段、
を備えることを要旨とする。
【0008】
この本発明のハイブリッド自動車では、内燃機関の運転を停止してリバース走行しているときにインバータに短絡故障が生じたときには、電動機から出力するトルクを値0としてリバース走行が禁止されるよう駆動回路を制御する。このように、リバース走行を禁止することにより、リバース走行に伴って同期電動発電機が回転し、同期電動発電機の回転に伴って同期電動発電機に生じる誘導起電力によって内燃機関が逆回転するのを抑制することができる。
【0009】
こうした本発明のハイブリッド自動車において、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記内燃機関が逆回転しないように前記電動機からトルクが出力されるよう前記駆動回路を制御する手段である、ものとすることもできる。こうすれば、内燃機関の逆回転を抑制しながら登坂路で発進することができる。この場合、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記電動機の回転数が車両を前進させる方向を正としたときに値0以上となるように前記電動機から出力されるトルクが調節されるよう前記駆動回路を制御する手段である、ものとすることもできる。
【0010】
また、本発明のハイブリッド自動車において、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには、車速の絶対値が車両の振動を抑制するために予め設定された所定車速以下となるように前記電動機からトルクが出力されるよう前記駆動回路を制御する手段である、ものとすることもできる。こうすれば、内燃機関の逆回転は許容するものの、内燃機関の逆回転に伴って車両が共振するのを抑制することができる。ここで、「リバース走行を許容しなければならないとき」には、退避走行のためにリバース走行しなければならないときや、登坂路で車両がずり下がってしまうときなどが含まれる。
【0011】
さらに、本発明のハイブリッド自動車において、運転者のブレーキ操作に拘わらずに車両に制動力を付与可能な制動力付与手段を備え、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記内燃機関が逆回転しないように前記電動機からのトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、ものとすることもできる。こうすれば、内燃機関の逆回転を抑制しながら登坂路で発進することができる。この場合、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記電動機の回転数が車両を前進させる方向を正としたときに値0以上となるように前記電動機から出力されるトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、ものとすることもできる。
【0012】
こうした制動力付与手段を備える態様の本発明のハイブリッド自動車において、前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには、車速の絶対値が車両の振動を抑制するために予め設定された所定車速以下となるように前記電動機からのトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、ものとすることもできる。こうすれば、内燃機関の逆回転は許容するものの、内燃機関の逆回転に伴って車両が共振するのを抑制することができる。ここで、「リバース走行を許容しなければならないとき」には、退避走行のためにリバース走行しなければならないときや、登坂路で車両がずり下がってしまうときなどが含まれる。
【0013】
本発明のハイブリッド自動車において、前記電動機は、前記駆動軸に動力を入出力可能な第1電動機と、前記駆動軸が連結された駆動輪とは異なる車輪に連結された車軸に動力を入出力可能な第2電動機と、の二つを含む、ものとすることもできる。
【0014】
本発明の駆動装置は、
内燃機関および充放電可能な蓄電手段と共に自動車に搭載され、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記蓄電手段と電力をやりとり可能に接続されて前記同期電動発電機を駆動するインバータと、前記蓄電手段と電力をやりとり可能に接続されて前記電動機を駆動する駆動回路と、を備える駆動装置であって、
前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときには、前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する制御手段、
を備えることを要旨とする。
【0015】
この本発明の駆動装置では、内燃機関の運転を停止してリバース走行しているときにインバータに短絡故障が生じたときには、電動機から出力するトルクを値0としてリバース走行が禁止されるよう駆動回路を制御する。このように、リバース走行を禁止することにより、リバース走行に伴って同期電動発電機が回転し、同期電動発電機の回転に伴って同期電動発電機に生じる誘導起電力によって内燃機関が逆回転するのを抑制することができる。
【0016】
本発明のハイブリッド自動車の制御方法は、
内燃機関と、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記同期電動発電機を駆動するインバータと、前記電動機を駆動する駆動回路と、前記インバータおよび前記駆動回路に接続されて前記同期電動発電機および前記電動機と電力のやりとりが可能な蓄電手段と、を備える自動車における前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときの制御方法であって、
前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する、
ことを特徴とする。
【0017】
この本発明のハイブリッド自動車の制御方法では、内燃機関の運転を停止してリバース走行しているときにインバータに短絡故障が生じたときには、電動機から出力するトルクを値0としてリバース走行が禁止されるよう駆動回路を制御する。このように、リバース走行を禁止することにより、リバース走行に伴って同期電動発電機が回転し、同期電動発電機の回転に伴って同期電動発電機に生じる誘導起電力によって内燃機関が逆回転するのを抑制することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。
【図2】ハイブリッド用電子制御ユニット70により実行されるリバース走行時制御ルーチンの一例を示すフローチャートである。
【図3】要求トルク設定用マップの一例を示す説明図である。
【図4】モータの定格トルクの一例を示す説明図である。
【図5】エンジン22の運転を停止してリバース走行しているときの動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
【図6】ハイブリッド用電子制御ユニット70により実行されるリバース禁止時発進制御ルーチンの一例を示すフローチャートである。
【図7】ハイブリッド用電子制御ユニット70により実行されるリバース許容制御ルーチンの一例を示すフローチャートである。
【図8】変形例のハイブリッド自動車120の構成の概略を示す構成図である。
【発明を実施するための形態】
【0019】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0020】
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、エンジン22と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介して接続された3軸式の動力分配統合機構30と、動力分配統合機構30に接続された発電可能なモータMG1と、動力分配統合機構30に接続されると共にギヤ機構60,デファレンシャルギヤ61を介して前輪62a,62bに接続された減速ギヤ35と、減速ギヤ35に接続されたモータMG2と、デファレンシャルギヤ63を介して後輪64a,64bに接続されたモータMG3と、車両の駆動系全体をコントロールするハイブリッド用電子制御ユニット70とを備える。
【0021】
エンジン22は、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関であり、エンジン22の運転状態を検出する各種センサから信号を入力するエンジン用電子制御ユニット(以下、エンジンECUという)24により燃料噴射制御や点火制御,吸入空気量調節制御などの運転制御を受けている。エンジンECU24は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッド用電子制御ユニット70に出力する。
【0022】
動力分配統合機構30は、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合すると共にリングギヤ32に噛合する複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備え、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行なう遊星歯車機構として構成されている。動力分配統合機構30は、キャリア34にはエンジン22のクランクシャフト26が、サンギヤ31にはモータMG1が、リングギヤ32には駆動軸としてのリングギヤ軸32aを介して減速ギヤ35がそれぞれ連結されており、モータMG1が発電機として機能するときにはキャリア34から入力されるエンジン22からの動力をサンギヤ31側とリングギヤ32側にそのギヤ比に応じて分配し、モータMG1が電動機として機能するときにはキャリア34から入力されるエンジン22からの動力とサンギヤ31から入力されるモータMG1からの動力を統合してリングギヤ32側に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構60およびデファレンシャルギヤ61を介して、最終的には前輪62a,62bに出力される。
【0023】
モータMG1,MG2,MG3は、いずれも発電機として駆動できると共に電動機として駆動できるロータに永久磁石が取り付けられた周知のPM型の同期発電電動機として構成されており、インバータ41,42,43を介してバッテリ50と電力のやりとりを行なう。インバータ41,42,43とバッテリ50とを接続する電力ライン54は、各インバータ41,42,43が共用する正極母線および負極母線として構成されており、モータMG1,MG2,MG3のいずれかで発電される電力を他のモータで消費することができるようになっている。したがって、バッテリ50は、モータMG1,MG2,MG3のいずれかから生じた電力や不足する電力により充放電されることになる。なお、モータMG1,MG2,MG3により電力収支のバランスをとるものとすれば、バッテリ50は充放電されない。モータMG1,MG2,MG3は、いずれもモータ用電子制御ユニット(以下、モータECUという)40により駆動制御されている。モータECU40には、モータMG1,MG2,MG3を駆動制御するために必要な信号、例えばモータMG1,MG2,MG3の回転子の回転位置を検出する回転位置検出センサ44,45,46からの信号や図示しない電流センサにより検出されるモータMG1,MG2,MG3に印加される相電流などが入力されており、モータECU40からは、インバータ41,42,43へのスイッチング制御信号が出力されている。モータECU40は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によってモータMG1,MG2,MG3を駆動制御すると共に必要に応じてモータMG1,MG2,MG3の運転状態に関するデータをハイブリッド用電子制御ユニット70に出力する。
【0024】
バッテリ50は、バッテリ用電子制御ユニット(以下、バッテリECUという)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧,バッテリ50の出力端子に接続された電力ライン54に取り付けられた図示しない電流センサからの充放電電流,バッテリ50に取り付けられた図示しない温度センサからの電池温度などが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッド用電子制御ユニット70に出力する。なお、バッテリECU52では、バッテリ50を管理するために電流センサにより検出された充放電電流の積算値に基づいて残容量(SOC)も演算している。
【0025】
前輪62a,62bおよび後輪64a,64bの各車輪には、ブレーキアクチュエータ68からの油圧により作動する油圧ブレーキが取り付けられている。ブレーキアクチュエータ68からの油圧の調節は、ブレーキ用電子制御ユニット(以下、ブレーキECUという)69による駆動制御により行なわれている。このブレーキECU69には、車輪速センサ69aにより検出される前輪62a,62bの車輪速Vfl,Vfr,後輪64a,64bの車輪速Vrl,Vrrが図示しない入力ポートを介して入力されており、ブレーキECU69からはブレーキアクチュエータ68への駆動信号などが出力ポートを介して出力されている。なお、ブレーキECU69は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によりブレーキアクチュエータ68を駆動制御すると共に必要に応じてブレーキアクチュエータ68の状態や前輪62a,62bおよび後輪64a,64bの状態に関するデータをハイブリッド用電子制御ユニット70に出力する。
【0026】
ハイブリッド用電子制御ユニット70は、CPU72を中心とするマイクロプロセッサとして構成されており、CPU72の他に処理プログラムを記憶するROM74と、データを一時的に記憶するRAM76と、図示しない入出力ポートおよび通信ポートとを備える。ハイブリッド用電子制御ユニット70には、イグニッションスイッチ80からのイグニッション信号,シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,車速センサ88からの車速V,勾配センサ89からの路面勾配θなどが入力ポートを介して入力されている。ハイブリッド用電子制御ユニット70は、前述したように、エンジンECU24やモータECU40,バッテリECU52,ブレーキECU69と通信ポートを介して接続されており、エンジンECU24やモータECU40,バッテリECU52,ブレーキECU69と各種制御信号やデータのやりとりを行なっている。
【0027】
こうして構成された実施例のハイブリッド自動車20は、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて車両に出力すべき要求トルクを計算し、この要求トルクに対応する要求動力により走行するように、エンジン22とモータMG1,MG2,MG3とが運転制御される。エンジン22とモータMG1,MG2,MG3の運転制御としては、要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが動力分配統合機構30とモータMG1とモータMG2およびモータMG3のいずれか又は両方とによってトルク変換されて出力されるようモータMG1とモータMG2とモータMG3とを駆動制御するトルク変換運転モードや、要求動力とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が動力分配統合機構30とモータMG1とモータMG2およびモータMG3のいずれか又は両方とによるトルク変換を伴って要求動力が出力されるようモータMG1とモータMG2とモータMG3とを駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG2およびモータMG3のいずれか又は両方から要求動力に見合う動力がに出力されるよう運転制御するモータ運転モードなどがある。
【0028】
次に、こうして構成された実施例のハイブリッド自動車20の動作、特にエンジン22の運転を停止した状態でリバース走行しているときにインバータ41のいずれかの相に短絡故障が生じたときの動作について説明する。図2は、エンジン22の運転を停止した状態でリバース走行するときにハイブリッド用電子制御ユニット70により実行されるリバース走行時制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば、数msec毎)に繰り返し実行される。
【0029】
リバース走行時制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3,インバータ異常フラグFinv1,バッテリ50の出力制限Wout,後輪分配比Drなどの制御に必要なデータを入力する(ステップS100)。ここで、モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3は、回転位置検出センサ44,45,46により検出される回転位置に基づいて各々演算されたものをモータECU40から通信により入力するものとした。また、インバータ異常フラグFinv1は、インバータ41のいずれかの相に短絡故障が生じているか否かを表わすフラグであり、図示しないインバータ異常判定処理により、インバータ41の各相の電流を監視し、いずれかの相に過電流が生じたときにその相が短絡故障が生じたとして値1が設定されてRAM76の所定領域に格納されたものを読み込むことによって入力するものとした。さらに、バッテリ50の出力制限Woutは、バッテリ50に取り付けられた図示しない温度センサにより検出されたバッテリ50の電池温度Tbとバッテリ50の残容量(SOC)とに基づいて設定されたものをバッテリECU52から通信により入力するものとした。なお、バッテリ50の出力制限Woutは、電池温度Tbに基づいて出力制限Woutの基本値を設定し、バッテリ50の残容量(SOC)に基づいて出力制限用補正係数を設定し、設定した出力制限Woutの基本値に補正係数を乗じることにより設定することができる。後輪分配比Drは、前輪62a,62b側に出力するトルクと後輪64a,64b側に出力するトルクとの和に対する後輪64a,64b側に出力するトルクの割合を示すものとして図示しない後輪分配比設定処理により設定されたものをブレーキECU69から通信により入力するものとした。なお、実施例の後輪分配比設定処理では、後輪分配比Drは、車速Vや後述する図2のステップS110で設定される要求トルクT*(制動時には制動力としてのトルク),車輪速センサ69aからの車輪速Vfl,Vfr,Vrl,Vrr等に基づいてスリップが発生しているか否か、発進時あるいは急加速時か否か、減速走行時か否かを判定し、いずれでもないと判定したときには値0を、スリップが発生していると判定したときにはスリップ時用の値を、発進時あるいは急加速時と判定したときには発進・急加速時用の値を、減速走行時と判定したときには減速走行時用の値を、それぞれ設定することにより行なわれる。
【0030】
続いて、入力したアクセル開度Accと車速Vとに基づいて車両全体に要求される要求トルクT*を設定する(ステップS110)。要求トルクT*は、実施例では、アクセル開度Accと車速Vと要求トルクT*との関係を予め求めて要求トルク設定用マップとしてROM74に記憶しておき、アクセル開度Accと車速Vとが与えられるとマップから対応する要求トルクT*を導出することにより設定するものとした。要求トルク設定用マップの一例を図3に示す。
【0031】
次に、次式(1),(2)により、値1から後輪分配比Drを減じたものに要求トルクT*を乗じて得られるトルクを前輪トルクTf*として設定すると共に後輪分配比Drに要求トルクT*を乗じて得られるトルクを後輪トルクTr*として設定し(ステップS120)、モータMG1のトルク指令Tm1*に値0を設定する(ステップS130)。このルーチンではエンジン22の運転を停止した状態でリバース走行する場合を考えているから、エンジン22の運転は停止しており、モータMG1はトルクを発生させないためにトルク指令Tm1*として値0が設定されるのである。
【0032】
Tf*=(1-Dr)×T* (1)
Tr*=Dr×T* (2)
【0033】
こうして前輪トルクTf*と後輪トルクTr*とを設定すると、インバータ異常フラグFinv1の値を調べ(ステップS140)、インバータ異常フラグFinv1が値0のとき、即ち、インバータ41に短絡故障が生じていないときには、モータMG2,MG3の回転数Nm2,Nm3に基づいてこの回転数Nm2,Nm3のときにモータMG2,MG3から出力可能なトルクの最大値としてのモータMG2,MG3の定格トルクTm2lim,Tm3limを導出すると共に(ステップS150)、次式(3),(4)によりバッテリ50の出力制限Woutに対して後輪分配比Drを適用して前輪側,後輪側に対する出力制限をモータMG2,MG3の回転数Nm2,Nm3で除して得られるトルクを上限制限Tm2max,Tm3maxとして計算して設定し(ステップS160)、式(5),(6)によりモータMG2,MG3から本来出力すべきトルクとして前輪トルクTf*,後輪トルクTr*をギヤ比G2,G3で除したものと導出した定格トルクTm2lim,Tm3limと設定した上限制限Tm2max,Tm3maxのうち最も小さいものを得てモータMG2,MG3のトルク指令Tm2*,Tm3*として設定する(ステップS170)。ここで、定格トルクTm2lim,Tm3limの導出は、実施例では、モータMG2,MG3の回転数Nm2,Nm3とモータMG2,MG3の定格トルクTm2lim,Tm3limとの関係を予め定格トルク設定用マップとしてROM74に記憶しておき、モータMG2,MG3の回転数Nm2,Nm3が与えられるとマップから対応する定格トルクTm2lim,Tm3limを導出することにより行なうものとした。モータの定格トルクの一例を図4に示す。
【0034】
Tm2max=(1-Dr)×Wout÷Nm2 (3)
Tm3max=Dr×Wout÷Nm3 (4)
Tm2*=min(Tf*/G2,Tm2lim,Tm2max) (5)
Tm3*=min(Tf*/G3,Tm3lim,Tm3max) (6)
【0035】
こうしてモータMG1,MG2,MG3のトルク指令Tm1*,Tm2*,Tm3*を設定すると、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信して(ステップS200)、本ルーチンを終了する。トルク指令Tm1*,Tm2*,Tm3*を受信したモータECU40は、トルク指令Tm1*のトルク(即ち値0)がモータMG1から出力されると共にトルク指令Tm2*のトルクがモータMG2から出力され、トルク指令Tm3*のトルクがモータMG3から出力されるようインバータ41,42,43のスイッチング素子のスイッチング制御を行なう。これにより、モータMG2とモータMG3とからのトルクによって車両を走行させることができる。エンジン22の運転を停止してリバース走行しているときの動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図を図5に示す。図中、左のS軸はモータMG1の回転数Nm1であるサンギヤ31の回転数を示し、C軸はエンジン22の回転数Neであるキャリア34の回転数を示し、R軸はモータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで除したリングギヤ32の回転数Nrを示す。また、図中、実線はインバータ異常フラグFinv1が値0のときのリバース走行の状態を示し、破線はインバータ異常フラグFinv1が値1のときのリバース走行の状態を示す。実線におけるR軸上の太線矢印はモータMG2から出力されるトルクTm2が減速ギヤ35を介してリングギヤ軸32aに作用するトルクを示し、S軸上の白抜き矢印はインバータ41に短絡故障が生じたときにモータMG1の誘導起電力により生じるトルクを示す。
【0036】
ステップS140でインバータ異常フラグFinv1が値1であると判定されると、インバータ41のいずれかの相に短絡故障が生じていると判断し、モータMG2,MG3のトルク指令Tm2*,Tm3*に値0を設定して(ステップS180)、リバース走行を禁止し(ステップS190)、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信して(ステップS200)、本ルーチンを終了する。インバータ41のいずれかの相に短絡故障が生じた状態でモータMG2,MG3から同様にトルクを出力してリバース走行すると、上述した図5の白抜き矢印に示すように、モータMG1が連れ回されるためにモータMG1の誘導起電力により生じるトルクにより、エンジン22は逆回転してしまう。実施例では、このエンジン22の逆回転が継続されるのを抑止するために、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定し、リバース走行を禁止するのである。即ち、上述の制御は、エンジン22の運転を停止した状態でリバース走行しているときにモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してインバータ42,43のスイッチング素子をスイッチング制御することにより、リバース走行を中止し、リバース走行を禁止する制御となる。こうした制御により、モータMG1のインバータ41に短絡故障が生じると、車両はリバース走行を終了して停車することになる。したがって、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止することにより、モータMG1の誘導起電圧によって生じるトルクにより若干のエンジン22の逆回転が生じるものの、エンジン22が継続して逆回転するのは抑止することができる。
【0037】
次に、実施例のハイブリッド自動車20において、モータMG1を駆動するインバータ41に短絡故障が生じて停車している車両を発進させるときの動作について説明する。図6は、ハイブリッド用電子制御ユニット70により実行されるリバース禁止時発進制御ルーチンの一例を示すフローチャートである。このルーチンは、モータMG1を駆動するインバータ41に短絡故障が生じている最中にシフトレバー81が前進走行用のドライブポジションに操作されて車両を発進させる際に所定時間毎(例えば、数msec毎)に繰り返し実行される。
【0038】
リバース禁止時発進制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3,勾配センサ89からの路面勾配θ,ずり下がりフラグFz,バッテリ50の出力制限Wout,後輪分配比Drなどの制御に必要なデータを入力する(ステップS300)。ここで、ずり下がりフラグFzは、登り勾配で車両がずり下がっているときに値1が設定されるものであり、このルーチンで設定されてRAM76の所定領域に格納されたものを読み出すことにより入力するものとした。なお、モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3やバッテリ50の出力制限Wout,後輪分配比Drについては上述した。
【0039】
続いて、入力したアクセル開度Accと車速Vと図3の要求トルク設定用マップとを用いて車両全体に要求されるトルクの仮の値としての仮要求トルクTtmpを設定し(ステップS310)、路面勾配θに基づいて車両がずり下がらないようにするためのトルクとしてのずり下がり防止トルクTzを設定する(ステップS320)。ここで、ずり下がり防止トルクTzは、車両総重量をMとするとM・sinθにより計算することができる。この場合の車両総重量としては、重量センサを備える車両であれば重量センサにより検出される値を用いるものとしたり、重量センサを備えない車両であれば、例えば製品規格としての総重量を用いるものとしたり、乗員数に応じた総重量を用いるものとしたりすることができる。なお、平坦路では、路面勾配θが値0となるため、ずり下がり防止トルクTzには値0が設定される。
【0040】
そして、ずり下がりフラグFzの値を調べ(ステップS330)、ずり下がりフラグFzが値0のとき、即ち、車両がずり下がっていないときには、モータMG2の回転数Nm2が負の値であるか否か、即ち、車両がずり下がって後進しているか否かを判定する(ステップS340)。モータMG2の回転数Nm2が負の値ではないときには、車両はずり下がっていないと判断し、補正トルクTajとして前回の値を設定すると共に(ステップS350)、カウンタCを値0にクリアする(ステップS360)。ここで、補正トルクTajは、車両にずり下がりが生じているときにずり下がり防止トルクTzを補正するためのものであり、初期値として値0が設定されている。したがって、平坦路では、車両にずり下がりは生じないので値0が補正トルクTajに設定されることになる。また、カウンタCは、車両のずり下がりを複数回の検出により判定するためのカウンタである。補正トルクTajとカウンタCについては、ステップS340の判定でモータMG2の回転数Nm2が負の値であると判定されたときの処理(ステップS370〜S390)を説明するときに更に後述する。
【0041】
そして、ずり下がり防止トルクTzと補正トルクTajとの和のトルクと仮要求トルクTtmpとのうち大きい方を要求トルクT*として設定し(ステップS440)、上述した式(1),(2)により、前輪トルクTf*と後輪トルクTr*とを設定すると共に(ステップS450)、モータMG1のトルク指令Tm1*に値0を設定し(ステップS460)。上述した図2のリバース走行時制御ルーチンのステップS150〜ステップS170と同一の処理によりモータMG2,MG3のトルク指令Tm2*,Tm3*を設定し(ステップS470〜S490)、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信すると共に油圧ブレーキとして作用させるトルクとしてのブレーキトルクTb*をブレーキECU69に送信して(ステップS500)、本ルーチンを終了する。ここで、ブレーキトルクTb*は、油圧ブレーキにより車両に作用させるべきトルクとして設定されるものであり、このルーチンでまだ説明していないステップS410〜S430により設定されるものである。ブレーキトルクTb*は、実施例では初期値として値0が設定されているから、ステップS410〜S430によって新たな値が設定されるまでは値0が設定されている。上述したように、平坦路では、ずり下がり防止トルクTzにも補正トルクTajにも値0が設定されるから、仮要求トルクTtmpがそのまま要求トルクT*として設定され、これを後輪分配比Drを用いて定格トルクTm2lim,Tm3limの範囲内で且つバッテリ50の出力制限Woutから設定される上限制限Tm2max,Tm3maxの範囲内でモータMG2,MG3のトルク指令Tm2*,Tm3*が設定されて発進する。
【0042】
一方、ステップS340でモータMG2の回転数Nm2が負の値であると判定されたときには、車両にずり下がりが生じていると判断し、前回の補正トルクTajから回転数Nm2にゲインkzを乗じたものを減じて新たな補正トルクTajを設定すると共に(ステップS370)、カウンタCを値1だけインクリメントし(ステップS380)、カウンタCが閾値Cset未満であるか否かを判定し(ステップS390)、カウンタCが閾値Cset未満であるときには、上述したステップS440〜S490の処理によりモータMG1,MG2,MG3のトルク指令Tm1*,Tm2*,Tm3*を設定し、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信すると共にブレーキトルクTb*をブレーキECU69に送信して(ステップS500)、本ルーチンを終了する。ここで、ゲインkzは、モータMG2の回転数Nm2に応じて補正トルクTajを増加させるためのものであり、このルーチンの実行頻度や車両重量などにより定めることができる。このように車両にずり下がりが生じているときには、ずり下がりの程度を表わすモータMG2の回転数Nm2に応じた補正トルクTajを設定し、この補正トルクTajとずり下がり防止トルクTzとの和のトルクと仮要求トルクTtmpとのうち大きい方を要求トルクT*に設定し、これを後輪分配比Drを用いて定格トルクTm2lim,Tm3limの範囲内で且つバッテリ50の出力制限Woutから設定される上限制限Tm2max,Tm3maxの範囲内でモータMG2,MG3のトルク指令Tm2*,Tm3*を設定して、モータMG1,MG2,MG3を制御する。路面勾配θに対してアクセルペダル83の踏み込み量が大きいときには大きな仮要求トルクTtmpが設定されるから、仮要求トルクTtmpが要求トルクT*として設定され、前輪トルクTf*や後輪トルクTr*が定格トルクTm2lim,Tm3limや上限制限Tm2max,Tm3maxによって制限されないときには、車両のずり下がりは終了する。路面勾配θに対してアクセルペダル83の踏み込み量が小さいときには小さな仮要求トルクTtmpが設定されるから、補正トルクTajとずり下がり防止トルクTzとの和が要求トルクT*として設定され、車両総重量Mが実際の総重量より必要以上に大きいときや前輪トルクTf*や後輪トルクTr*が定格トルクTm2lim,Tm3limや上限制限Tm2max,Tm3maxによって制限されないときには、車両のずり下がりは終了する。車両のずり下がりが終了した後にこのルーチンが実行されると、ステップS340ではモータMG2の回転数Nm2が負の値ではないと判定され、前回の補正トルクTaj、即ち、モータMG2の回転数Nm2が負の値であると判定されたときに設定された補正トルクTajを用いて要求トルクT*が設定されるから、路面勾配θに対してアクセルペダル83の踏み込み量が大きくなったときに車両は発進することになる。
【0043】
路面勾配θに対してアクセルペダル83の踏み込み量が大きくても前輪トルクTf*や後輪トルクTr*が定格トルクTm2lim,Tm3limや上限制限Tm2max,Tm3maxによって制限されることにより車両のずり下がりが終了しないときや、路面勾配θに対してアクセルペダル83の踏み込み量が小さいために補正トルクTajとずり下がり防止トルクTzとの和のトルクが要求トルクT*として設定されても車両総重量Mより実際の総重量の方が大きかったり要求トルクT*から得られる前輪トルクTf*や後輪トルクTr*が定格トルクTm2lim,Tm3limや上限制限Tm2max,Tm3maxによって制限されることにより車両のずり下がりが終了しないときには、ステップS340ではモータMG2の回転数Nm2が負の値であると判定され、カウンタCが閾値Csetに至るまで前回の補正トルクTajからそのときの回転数Nm2にゲインkzを乗じたものを減じて新たな補正トルクTajを設定すると共にこの補正トルクTajを用いて要求トルクT*を設定して、モータMG1,MG2,MG3を制御する処理(ステップS370〜S390,S440〜S500)を繰り返す。そして、カウンタCが閾値Csetに至ると、ずり下がりフラグFzに値1を設定し(ステップS400)、車速Vが負の値であるか否かを判定し(ステップS410)、車速Vが負の値であるときには油圧ブレーキに作用させるブレーキトルクTb*として前回のブレーキトルクTb*に所定トルクΔTbだけ加えたものを設定し(ステップS420)、車速Vが負の値ではないときにはブレーキトルクTb*として前回のブレーキトルクTb*を設定して(ステップS430)、上述したステップS440〜S500の処理を実行して本ルーチンを終了する。ブレーキトルクTb*がブレーキECU69に送信されると、ブレーキECU69は、ブレーキを作用させるための後輪分配比Dbを用いてブレーキトルクTb*を前輪ブレーキトルクTbfと後輪ブレーキトルクTbrとに分配し、この前輪ブレーキトルクTbfと後輪ブレーキトルクTbrとに基づいてブレーキアクチュエータ68からの油圧を調整し、前輪62a,62bおよび後輪64a,64bに制動力を作用させる。こうした処理により、ずり下がりフラグFzに値1が設定されると、次回以降にこのルーチンが実行されると、ステップS330ではずり下がりフラグFzは値1であると判定され、車速Vが負の値ではなくなるまで、即ち、車両のずり下がりが終了するまでブレーキトルクTb*を所定トルクΔTbだけ大きくすると共に(S410〜S430)、上述したステップS440〜S500の処理を繰り返す。この制御により、車両のずり下がりは、いずれ終了する。
【0044】
ステップS340でモータMG2の回転数Nm2が負の値であると判定されたり、ずり下がりフラグFzに値1が設定されてブレーキトルクTb*により車速Vが負の値ではなくなるまでは、車両にはずり下がりが生じる。このとき、モータMG1を駆動するインバータ41には短絡故障が生じており、エンジン22の運転は停止されているから、モータMG1は図5の共線図では値0より上側に回転する。このとき、モータMG1には誘導起電力により図中下向き(白抜き矢印の方向)のトルクが生じるが、モータMG1の回転数Nm1が小さいことから、誘導起電力により生じるトルクも小さいために、エンジン22の逆回転は生じない。
【0045】
次に、実施例のハイブリッド自動車20において、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときのリバース走行するときの動作について説明する。図7は、ハイブリッド用電子制御ユニット70により実行されるリバース許容制御ルーチンの一例を示すフローチャートである。このルーチンは、モータMG1を駆動するインバータ41に短絡故障が生じている最中にシフトレバー81がリバース走行用のポジションに操作された際に所定時間毎(例えば、数msec毎)に繰り返し実行される。なお、リバース走行を許容しなければならないときとしては、退避走行の必要からリバース走行しなければならないときや、エンジン22の運転を停止した状態でリバース走行しているときにインバータ41のいずれかの相に短絡故障が生じたことによりモータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止したが、登坂路であるために停車後に車両にずり下がりが生じ、このずり下がりを抑止できないときなどを挙げることができる。
【0046】
リバース許容制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2,MG3の回転数Nm1,Nm2,Nm3,後輪分配比Drなどの制御に必要なデータを入力すると共に(ステップS600)、入力したアクセル開度Accと車速Vと図3の要求トルク設定用マップとを用いて車両全体に要求されるトルクの仮の値としての仮要求トルクTtmpを設定し(ステップS610)、車速Vが負の値に設定された閾値Vset未満であるか否かを判定する(ステップS620)。ここで、閾値Vsetは、車両が後進する際にモータMG1の誘導起電力によるトルクによってエンジン22が逆回転したときに車両に共振が生じるエンジン22の回転数帯より小さな回転数でエンジン22が逆回転するときの車速として設定されるものであり、例えば、共振周波数帯としてエンジン22の回転数が300〜600rpmなどを用い、3km/hや5km/hなどを用いることができる。
【0047】
車速Vが閾値Vset以上のとき、即ち、車速Vの絶対値が閾値Vsetの絶対値より小さいときには、補正トルクTajとして前回の補正トルクTajを設定すると共に(ステップS630)、ブレーキトルクTb*として前回のブレーキトルクTb*を設定し(ステップS640)、仮要求トルクTtmpに補正トルクTajを加えたものを要求トルクT*として設定し(ステップS670)、要求トルクT*と後輪分配比Drとに基づいて上述の式(1),(2)に基づいて前輪トルクTf*,後輪トルクTr*を設定し(ステップS680)、図6のリバース禁止時発進制御ルーチンにおけるステップS460〜S490と同一の処理によりモータMG1,MG2,MG3のトルク指令Tm1*,Tm2*,Tm3*を設定し(ステップS690〜S720)、設定したトルク指令Tm1*,Tm2*,Tm3*をモータECU40に送信すると共にブレーキトルクTb*をブレーキECU69に送信して(ステップS730)、本ルーチンを終了する。ここで、補正トルクTajとブレーキトルクTb*とには、実施例では、このルーチンが初めて実行されるときに初期値として値0が設定されている。
【0048】
一方、ステップS620で車速Vが閾値Vset未満、即ち、車速Vの絶対値が閾値Vsetの絶対値より大きいと判定されたときには、前回の補正トルクTajから所定トルクΔTajを減じた値を新たな補正トルクTajに設定すると共に(ステップS650)、前回のブレーキトルクTb*に所定トルクΔTbを加えた値を新たなブレーキトルクTb*として設定し(ステップS660)、ステップS670〜S730の処理を実行して本ルーチンを終了する。こうした制御により、車速Vが閾値Vset以上の範囲内でリバース走行を許容することができる。このとき、モータMG1には誘導起電力により図5中下向き(白抜き矢印の方向)のトルクが生じ、このトルクのためにエンジン22の逆回転が生じるが、車両に共振が生じる回転数帯より小さな回転数でエンジン22が逆回転するから、車両の共振は抑制することができる。
【0049】
以上説明した実施例のハイブリッド自動車20によれば、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止することにより、モータMG1の誘導起電圧によって生じるトルクにより若干のエンジン22の逆回転が生じるものの、エンジン22が継続して逆回転するのを抑止することができる。
【0050】
また、実施例のハイブリッド自動車20によれば、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときは、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御するから、車両の発進時に車両がずり下がることによってエンジン22が逆回転するのを抑制することができる。しかも、ずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定では車両のずり下がりを抑止できないときには、車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動することにより車両のずり下がりを抑止するから、より確実に車両のずり下がりを抑止することができる。この結果、車両の発進時に車両がずり下がることによってエンジン22が逆回転するのをよく確実に抑制することができる。
【0051】
さらに、実施例のハイブリッド自動車20によれば、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動させることにより、車両を閾値Vset以上の車速でリバース走行することができる。この結果、エンジン22の逆回転は生じるものの、エンジン22の逆回転による車両の共振は抑制した状態でリバース走行することができる。
【0052】
実施例のハイブリッド自動車20では、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときには、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御するものとしたが、モータMG2の回転数Nm2に代えて車速Vが負の値とならないように要求トルクT*を設定するものとしてもよいし、エンジン22の逆回転が抑止できればよいから、エンジン22の回転数Neが負の値とならないように要求トルクT*を設定するものとしてもよいし、モータMG1の回転数Nm1が正の値とならないように要求トルクT*を設定するものとしてもよい。もとより、モータMG3の回転数Nm3が負の値とならないように要求トルクT*を設定するものとしてもよい。
【0053】
実施例のハイブリッド自動車20では、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときに、ずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定では車両のずり下がりを抑止できないときには、車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動することにより車両のずり下がりを抑止するものとしたが、車速Vに代えてモータMG2の回転数Nm2が負の値とならないようにブレーキトルクTb*を設定するものとしてもよいし、エンジン22の逆回転が抑止できればよいから、エンジン22の回転数Neが負の値とならないようにブレーキトルクTb*を設定するものとしてもよいし、モータMG1の回転数Nm1が正の値とならないようにブレーキトルクTb*を設定するものとしてもよい。もとより、モータMG3の回転数Nm3が負の値とならないようにブレーキトルクTb*を設定するものとしてもよい。
【0054】
実施例のハイブリッド自動車20では、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときには、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御し、カウンタCが閾値Csetに至ってずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定では車両のずり下がりを抑止できないと判定したときに、車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動することにより車両のずり下がりを抑止するものとしたが、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときには、アクセル開度Accに応じた要求トルクT*を設定してモータMG2,MG3を駆動制御すると共に路面勾配θに応じて車両のずり下がりを防止するためのブレーキトルクTb*を設定して油圧ブレーキを制御するものとしてもよく、アクセル開度Accに応じた要求トルクT*を設定してモータMG2,MG3を駆動制御すると共にモータMG2の回転数Nm2が負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを制御するものとしてもよい。
【0055】
実施例のハイブリッド自動車20では、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動するものとしたが、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときには、油圧ブレーキを用いることなく、車速Vが閾値Vset以上となるように補正トルクTajを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御するものとしてもよいし、アクセル開度Accと車速Vとに応じた要求トルクT*を補正することなく、車速Vが閾値Vset以上となるようにブレーキトルクTb*を設定し、要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動するものとしてもよい。
【0056】
実施例のハイブリッド自動車20では、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止すると共にリバース走行を禁止し、この状態から車両を発進させるときは、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御し、このとき車両のずり下がりが生じると、車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動することにより車両のずり下がりを抑止するものとしたが、モータMG1を駆動するインバータ41に短絡故障が生じたことによりリバース走行を禁止したときには、車両の発進も禁止するものとしてもよい。
【0057】
実施例のハイブリッド自動車20では、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときには、モータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止すると共にリバース走行を禁止し、この状態でリバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動するものとしたが、モータMG1を駆動するインバータ41に短絡故障が生じたことによりリバース走行を禁止したときには、如何なるときでもリバース走行を許容しないものとしてもよい。
【0058】
実施例のハイブリッド自動車20では、エンジン22と動力分配統合機構30とモータMG1,MG2とを前輪62a,62b側に接続し、モータMG3を後輪64a,64b側に接続したが、エンジン22と動力分配統合機構30とモータMG1,MG2とを後輪64a,64b側に接続し、モータMG3を前輪62a,62b側に接続するものとしてもよい。
【0059】
実施例のハイブリッド自動車20では、エンジン22と動力分配統合機構30とモータMG1,MG2とを前輪62a,62b側に接続し、モータMG3を後輪64a,64b側に接続したが、後輪64a,64bの各々にインホイールモータを取り付けるものとしてもよいし、後輪64a,64bにはモータを取り付けないものとしても構わない。更に、図8のハイブリッド自動車120に例示するように、モータMG2を備えないものとしても構わない。
【0060】
また、こうしたハイブリッド自動車に適用するものに限定されるものではなく、エンジン22やバッテリ50と共にハイブリッド自動車に搭載される駆動装置の形態としてもよく、また、ハイブリッド自動車の制御方法の形態としても構わない。
【0061】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、エンジン22が「内燃機関」に相当し、モータMG1が「同期電動発電機」に相当し、動力分配統合機構30が「遊星歯車機構」に相当し、モータMG2,MG3が「電動機」に相当し、インバータ41が「インバータ」に相当し、インバータ42,43が「駆動回路」に相当し、バッテリ50が「蓄電手段」に相当し、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときにはモータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してモータECU40に送信してリバース走行を中止すると共にリバース走行を禁止する図2のリバース走行時制御ルーチンを実行し、モータMG1を駆動するインバータ41に短絡故障が生じているときに車両を発進させるときは、路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定すると共に要求トルクT*を用いてモータMG2,MG3のトルク指令Tm2*,Tm3*を設定してモータECU40に送信し、ずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定によっては車両のずり下がりを抑止できないときには、車速Vが負の値とならないようにブレーキトルクTb*を設定してブレーキECU69に送信する図6のリバース禁止時発進制御ルーチンを実行し、モータMG1を駆動するインバータ41に短絡故障が生じてリバース走行を禁止しているときにリバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定し、補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3のトルク指令Tm2*,Tm3*を設定してモータECU40に送信すると共にブレーキトルクTb*をブレーキECU69に送信する図7のリバース許容制御ルーチンを実行する、ハイブリッド用電子制御ユニット70と、トルク指令Tm2*,Tm3*を受信してモータMG2,MG3の駆動回路としてのインバータ42,43を制御するモータECU40と、ブレーキトルクTb*を受信してブレーキアクチュエータ68を制御するブレーキECU69とが「制御手段」に相当する。
【0062】
ここで、「内燃機関」としては、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関に限定されるものではなく、水素エンジンなど如何なるタイプの内燃機関であっても構わない。「同期電動発電機」としては、回転に伴って誘導起電圧を発生する発電機であれば如何なる発電機であっても構わない。「遊星歯車機構」としては、上述の動力分配統合機構30に限定されるものではなく、ダブルピニオン式の遊星歯車機構を用いるものや複数の遊星歯車機構を組み合わせて4以上の軸に接続されるものなど、1つ以上の遊星歯車を備えるものであれば如何なるものとしても構わない。「電動機」としては、同期発電電動機として構成されたモータMG2,MG3に限定されるものではなく、誘導電動機など、駆動軸に動力を入出力可能なものであれば如何なるタイプの電動機であっても構わない。また、少なくとも一つの電動機であるため、三つ以上の電動機としてもよく、単一の電動機としてもよい。「蓄電手段」としては、二次電池としてのバッテリ50に限定されるものではなく、キャパシタなど、発電機と電力のやりとりが可能であれば如何なるものとしても構わない。「制御手段」としては、ハイブリッド用電子制御ユニット70とモータECU40とブレーキECU69とからなる組み合わせに限定されるものではなく単一の電子制御ユニットにより構成されるなどとしてもよい。また、「制御手段」としては、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときにはモータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止すると共にリバース走行を禁止し、この状態で車両を発進させるときは路面勾配θに応じたずり下がり防止トルクTzと補正トルクTajとを用いてモータMG2の回転数Nm2が負の値とならないように要求トルクT*を設定してモータMG2,MG3を駆動制御すると共にずり下がり防止トルクTzと補正トルクTajとを用いた要求トルクT*の設定によっては車両のずり下がりを抑止できないときには車速Vが負の値とならないようにブレーキトルクTb*を設定して油圧ブレーキを作動し、リバース走行を許容しなければならないときには、エンジン22の逆回転によって車両に共振が生じる車速より絶対値が小さい車速として設定された閾値Vset以上の車速となるように補正トルクTajとブレーキトルクTb*とを設定して補正トルクTajにより補正された要求トルクT*によってモータMG2,MG3を駆動制御すると共にブレーキトルクTb*により油圧ブレーキを作動するものに限定されるものではなく、リバース走行している最中にモータMG1を駆動するインバータ41に短絡故障が生じたときにはモータMG2,MG3のトルク指令Tm2*,Tm3*を値0に設定してリバース走行を中止すると共にリバース走行を禁止し、この状態での車両の発進も禁止したり、リバース走行を許容しないものとするなど、内燃機関の運転を停止してリバース走行しているときにインバータに短絡故障が生じたときには電動機から出力するトルクを値0としてリバース走行が禁止されるよう駆動回路を制御するものであれば如何なるものとしても構わない。
【0063】
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0064】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0065】
本発明は、ハイブリッド自動車の製造産業などに利用可能である。
【符号の説明】
【0066】
20,120 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30 動力分配統合機構、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、33 ピニオンギヤ、34 キャリア、35 減速ギヤ、40 モータ用電子制御ユニット(モータECU)、41,42,43 インバータ、44,45,46 回転位置検出センサ、50 バッテリ、52 バッテリ用電子制御ユニット(バッテリECU)、54 電力ライン、60 ギヤ機構、61,63 デファレンシャルギヤ、62a,62b 前輪、64a,64b 後輪、68 ブレーキアクチュエータ、69 ブレーキECU、69a 車輪速センサ、70 ハイブリッド用電子制御ユニット、72 CPU、74 ROM、76 RAM、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、89 勾配センサ、MG1,MG2,MG3 モータ。
【特許請求の範囲】
【請求項1】
内燃機関と、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記同期電動発電機を駆動するインバータと、前記電動機を駆動する駆動回路と、前記インバータおよび前記駆動回路に接続されて前記同期電動発電機および前記電動機と電力のやりとりが可能な蓄電手段と、を備えるハイブリッド自動車であって、
前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときには、前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する制御手段、
を備えるハイブリッド自動車。
【請求項2】
請求項1記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記内燃機関が逆回転しないように前記電動機からトルクが出力されるよう前記駆動回路を制御する手段である、
ハイブリッド自動車。
【請求項3】
請求項2記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記電動機の回転数が車両を前進させる方向を正としたときに値0以上となるように前記電動機から出力されるトルクが調節されるよう前記駆動回路を制御する手段である、
ハイブリッド自動車。
【請求項4】
請求項1ないし3のいずれか1つの請求項に記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには、車速の絶対値が車両の振動を抑制するために予め設定された所定車速以下となるように前記電動機からトルクが出力されるよう前記駆動回路を制御する手段である、
ハイブリッド自動車。
【請求項5】
請求項1記載のハイブリッド自動車であって、
運転者のブレーキ操作に拘わらずに車両に制動力を付与可能な制動力付与手段を備え、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記内燃機関が逆回転しないように前記電動機からのトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、
ハイブリッド自動車。
【請求項6】
請求項5記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記電動機の回転数が車両を前進させる方向を正としたときに値0以上となるように前記電動機から出力されるトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、
ハイブリッド自動車。
【請求項7】
請求項5または6記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには、車速の絶対値が車両の振動を抑制するために予め設定された所定車速以下となるように前記電動機からのトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、
ハイブリッド自動車。
【請求項8】
請求項1ないし7のいずれか1つの請求項に記載のハイブリッド自動車であって、
前記電動機は、前記駆動軸に動力を入出力可能な第1電動機と、前記駆動軸が連結された駆動輪とは異なる車輪に連結された車軸に動力を入出力可能な第2電動機と、の二つを含む、
ハイブリッド自動車。
【請求項9】
内燃機関および充放電可能な蓄電手段と共に自動車に搭載され、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記蓄電手段と電力をやりとり可能に接続されて前記同期電動発電機を駆動するインバータと、前記蓄電手段と電力をやりとり可能に接続されて前記電動機を駆動する駆動回路と、を備える駆動装置であって、
前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときには、前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する制御手段、
を備える駆動装置。
【請求項10】
内燃機関と、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記同期電動発電機を駆動するインバータと、前記電動機を駆動する駆動回路と、前記インバータおよび前記駆動回路に接続されて前記同期電動発電機および前記電動機と電力のやりとりが可能な蓄電手段と、を備えるハイブリッド自動車における前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときの制御方法であって、
前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する、
ことを特徴とするハイブリッド自動車の制御方法。
【請求項1】
内燃機関と、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記同期電動発電機を駆動するインバータと、前記電動機を駆動する駆動回路と、前記インバータおよび前記駆動回路に接続されて前記同期電動発電機および前記電動機と電力のやりとりが可能な蓄電手段と、を備えるハイブリッド自動車であって、
前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときには、前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する制御手段、
を備えるハイブリッド自動車。
【請求項2】
請求項1記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記内燃機関が逆回転しないように前記電動機からトルクが出力されるよう前記駆動回路を制御する手段である、
ハイブリッド自動車。
【請求項3】
請求項2記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記電動機の回転数が車両を前進させる方向を正としたときに値0以上となるように前記電動機から出力されるトルクが調節されるよう前記駆動回路を制御する手段である、
ハイブリッド自動車。
【請求項4】
請求項1ないし3のいずれか1つの請求項に記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには、車速の絶対値が車両の振動を抑制するために予め設定された所定車速以下となるように前記電動機からトルクが出力されるよう前記駆動回路を制御する手段である、
ハイブリッド自動車。
【請求項5】
請求項1記載のハイブリッド自動車であって、
運転者のブレーキ操作に拘わらずに車両に制動力を付与可能な制動力付与手段を備え、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記内燃機関が逆回転しないように前記電動機からのトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、
ハイブリッド自動車。
【請求項6】
請求項5記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態で登坂路で発進するときには、前記電動機の回転数が車両を前進させる方向を正としたときに値0以上となるように前記電動機から出力されるトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、
ハイブリッド自動車。
【請求項7】
請求項5または6記載のハイブリッド自動車であって、
前記制御手段は、前記インバータに短絡故障が生じている最中に前記内燃機関の運転を停止した状態でリバース走行を許容しなければならないときには、車速の絶対値が車両の振動を抑制するために予め設定された所定車速以下となるように前記電動機からのトルクおよび/または前記制動力付与手段からの制動力を調節するよう前記駆動回路および/または前記制動力付与手段を制御する手段である、
ハイブリッド自動車。
【請求項8】
請求項1ないし7のいずれか1つの請求項に記載のハイブリッド自動車であって、
前記電動機は、前記駆動軸に動力を入出力可能な第1電動機と、前記駆動軸が連結された駆動輪とは異なる車輪に連結された車軸に動力を入出力可能な第2電動機と、の二つを含む、
ハイブリッド自動車。
【請求項9】
内燃機関および充放電可能な蓄電手段と共に自動車に搭載され、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記蓄電手段と電力をやりとり可能に接続されて前記同期電動発電機を駆動するインバータと、前記蓄電手段と電力をやりとり可能に接続されて前記電動機を駆動する駆動回路と、を備える駆動装置であって、
前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときには、前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する制御手段、
を備える駆動装置。
【請求項10】
内燃機関と、動力を入出力可能な同期電動発電機と、前記内燃機関の出力軸と前記同期電動発電機の回転軸と駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図上で前記回転軸,前記出力軸,前記駆動軸の順に並ぶよう接続された遊星歯車機構と、走行用の動力を出力可能な少なくとも一つの電動機と、前記同期電動発電機を駆動するインバータと、前記電動機を駆動する駆動回路と、前記インバータおよび前記駆動回路に接続されて前記同期電動発電機および前記電動機と電力のやりとりが可能な蓄電手段と、を備えるハイブリッド自動車における前記内燃機関の運転を停止してリバース走行しているときに前記インバータに短絡故障が生じたときの制御方法であって、
前記電動機から出力するトルクを値0としてリバース走行が禁止されるよう前記駆動回路を制御する、
ことを特徴とするハイブリッド自動車の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−173476(P2010−173476A)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2009−18359(P2009−18359)
【出願日】平成21年1月29日(2009.1.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願日】平成21年1月29日(2009.1.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]