
Fターム[5H115RB11]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | 複数電動機の制御 (1,114)
Fターム[5H115RB11]の下位に属するFターム
ステアリング角に応じたもの (107)
電動機の接続を切り替えることによるもの (11)
左右の電動機の制御 (407)
前後の電動機の制御 (239)
Fターム[5H115RB11]に分類される特許
1 - 20 / 350
ハイブリッド車両の制御装置
【課題】コンデンサにおける回生電力の蓄電機能を向上させる。
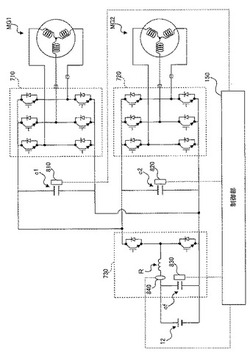
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)、第1電動機(MG1)及び第2電動機(MG2)と、電源手段(12)と、第1及び第2電動機の各々に対応するインバータ(710,720)及びコンデンサ(c1,c2)とを備えたハイブリッド車両を制御するものであり、回生を行うべき状態であるか否かを判定する回生判定手段(110)と、電源手段の蓄電量又は温度が所定の閾値以上であるか否かを判定する電源状態判定手段(120)と、一方の電動機で回生を行うと共に、他方の電動機の回転数をゼロに近づけるように制御する電動機制御手段(130)と、電源手段から他方の電動機に対応するインバータへの電力供給を遮断し、回生電力を他方の電動機に対応するコンデンサに蓄電させる蓄電制御手段(140)とを備える。
(もっと読む)
ハイブリッド自動車

【課題】発電機用インバータのスイッチングに伴うノイズの変化により運転者に違和感を与えるのを抑制する。
【解決手段】第1モータは車速Vに同期せずに回転する構成であり、車速変化量ΔVと回転数変化量ΔNm1との積が値0より大きいときには(S150)、第1モータの回転数Nm1に同期して変更されるキャリア周波数を用いたPWM制御方式でインバータをスイッチングする同期キャリアPWM制御方式によって第1モータが駆動されるようインバータを制御する(S170)。また、車速変化量ΔVと回転数変化量ΔNm1との積が値0以下のときには、予め固定されたキャリア周波数を用いたPWM制御方式でインバータをスイッチングする固定キャリアPWM制御方式によって第1モータが駆動されるようインバータを制御する(S160)。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両の駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御する。
【解決手段】HVECU70は、SMR55をオフするバッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、MG1およびMG2が電力制御トルクを出力したときと、出力しないときとの間での駆動軸32aに出力可能なトルク範囲の差分を算出し、さらに、当該差分の時間軸に対する変化量を制約した値を反映して駆動トルクの上下限範囲を定める。MG1およびMG2のトルク指令値は、当該上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように設定される。
(もっと読む)
フェールセーフ装置
【課題】パワートレインに所定以上のトルクが作用し、動力源とその動力源が出力するトルクによって駆動される駆動対象物との動力伝達が遮断された場合に、制限された範囲でトルクの伝達が可能なフェールセーフ装置を提供する。
【解決手段】動力源2とその動力源が出力するトルクによって駆動される駆動対象物Wとが連結軸9によって連結されたフェールセーフ装置において、連結軸9は、動力源2に許容されるトルク以上のトルクが掛かった場合に破断するように構成され、かつその連結軸9を軸線方向に押圧して、連結軸9が破断した場合の破断面同士13を接触させる弾性力を連結軸9に付与する弾性機構14が設けられている。
(もっと読む)
電動動力源装置
【課題】相互に独立した2系統の電源系において、それぞれのバッテリ残量の制御を行う。
【解決手段】電動動力源装置は、複数の系を有する。それぞれの系は、電力の授受を行うバッテリと、出力用及び回生用に変更可能な2つ以上の独立した巻線を有し、自系又は他系のバッテリからの電力の供給を受ける場合には駆動トルクを出力し、回生制御を行う場合には電力を生成するモータと、バッテリとモータの電力の授受を制御する駆動回路と、を備える。モータは、一方の巻線が出力用として動作することで、一方の系のバッテリから電力の供給を受け駆動トルクを出力する場合に、他方の巻線が回生用として動作することで電力を生成し他方の系のバッテリの充電を行う。
(もっと読む)
ハイブリッド自動車
【課題】目標エンジン回転数に基づく第1電動機の目標回転数と当該第1電動機の回転数との差がなくなるように目標トルクを設定すると共に当該目標トルクに応じたトルクを出力するように第1電動機を制御する際に、ねじれ要素の共振による影響を良好に低減して内燃機関の回転数を目標エンジン回転数に良好に近づける。
【解決手段】エンジン22が運転されるときに目標回転数Ne*に基づくモータMG1の目標回転数Nm1*とフィルタによりダンパ28の共振による影響成分が除去されたモータMG1の制御用回転数Nm1cとの差がなくなるようにモータMG1のトルク指令Tm1*が設定され、トルク指令Tm1*に応じたトルクを出力するようにモータMG1が制御される。そして、フィルタは、ダンパ28に接続されるマスの大きさに応じてモータMG1の回転数から除去されるカット周波数帯fcの成分を異ならせるように構成される。
(もっと読む)
誘導受電回路
【課題】本発明は、簡単な回路構成で、低電圧の電気二重層コンデンサを対象にして充放電することができる誘導受電回路を提供することを目的とする。
【解決手段】高周波電流を流す誘導線路17に対向して配置され誘導線路17より起電力が誘起される受電コイル30と、受電コイル30とともに誘導線路17の周波数に共振する共振回路31を形成する共振コンデンサ32と、共振回路31から出力される電流を整流する整流回路33と、定格電圧が低電圧(例えば、15V)の電気二重層コンデンサ46と、この電気二重層コンデンサ46と共振回路31との間での充放電を行う共振電源回路47を備え、整流回路33により整流された電流を消費電力が変動する負荷へ給電し、共振電源回路47は、放電動作時に、共振回路31を共振要素として使用し、誘導線路17の周波数で自己発振して電気二重層コンデンサ46より共振回路31へ給電する。
(もっと読む)
全方向移動型電動車両およびその制御方向
【課題】障害物回避動作を行う全方向移動型電動車両は、操作した方向と異なる方向に動作するため、操作者に対し強い違和感や不安感を抱かせるという問題がある。
【解決手段】車体部14と、操作者が操作した操作方向および操作量を検出する車体部14に設けた操作入力部13と、障害物までの距離および方向を検出する障害物センサ18と、操作入力部において検出される操作方向および操作量により操作力を算出する操作力推測部17と、障害物センサ18が検出した障害物までの距離に反比例し、かつ、障害物と反対方向に作用する仮想斥力を算出する仮想斥力算出部19と、操作力および仮想斥力の和より合力を算出する合力算出部20と、車体部14を操作力の方向から合力の方向へ回転させながら、合力の方向へ移動するよう制御する制御部21とを備えた構成である。
(もっと読む)
ハイブリッド自動車
【課題】燃料残量が少ないときに、燃料タンクの燃料をエンジンに正常に供給できなくなるのを抑制する。
【解決手段】エンジンが運転中で要求パワーPe*が閾値Pstop以下のときに(S120,S180)、燃料残量Qfが閾値Qfref以下で横方向加速度Gyの大きさが閾値Gyref以上のときには(S230,S240)、エンジンを継続して運転しながら要求トルクTr*によって走行するようエンジン22の目標回転数Ne*や目標トルクTe*,モータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンと二つのモータとを制御する(S250,S200〜S220)。
(もっと読む)
電気車制御装置
【課題】駆動用電動機を用いて車体に直接力をかけて振動制御を実現する。
【解決手段】台車内の2台の電動機がそれぞれ駆動装置を介して2つの車軸を駆動する電気車において,駆動装置は回転運動を拘束するための吊りリンクを有し,前記吊りリンクは前記駆動装置と車体との間を接続し,2台の電動機に逆方向のトルクを重畳することにより前記吊りリンクに上下力を発生させることにより車体に直接上下力を発生させて、車体の振動制御を行うことを特徴とする電気車制御装置。
(もっと読む)
モータ制御システム
【課題】車両に搭載される同一定格出力の2つのモータを全領域で効率よく駆動させる。
【解決手段】モータ制御システム1のECU8は、記憶部9とCPU10とを有する。記憶部9には、第1及び第2モータ4a,4bの全体としての効率に基づいて予め設定された低トルク領域、中トルク領域及び高トルク領域の境界を示す境界トルクTx,Tyが記憶される。CPU10の判定部12は、要求トルクTnと境界トルクTx,Tyとを比較して、モータ回転数Nと要求トルクTnとが属する領域を判定する。CPU10の制御部13は、判定された領域が低トルク領域の場合には、第1モータ4aのみを駆動し、中トルク領域の場合には、第1モータ4aが最大トルクを出力する状態で第1及び第2モータを駆動し、高トルク領域の場合には、第1及び第2モータを同等に駆動する。
(もっと読む)
モータ制御システム
【課題】定格出力が異なる2つのモータを全領域で効率よく駆動させる。
【解決手段】モータ制御システム1のECU8は、記憶部9とCPU10とを有する。記憶部9には、小出力及び大出力モータ4a,4bの全体のモータ効率に基づいて予め設定された第1〜第4領域の境界を示す境界トルクTx〜Tzが記憶される。CPU10の判定部12は、要求トルクTnと境界トルクTx〜Tzとを比較して、モータ回転数Nと要求トルクTnとが属する領域を判定する。CPU10の制御部13は、判定された領域が第1領域の場合には、小出力モータ4aのみを駆動し、第2領域の場合には、小出力モータ4aが最大トルクTamaxを出力する状態で2つのモータ4a,4bを駆動し、第3領域の場合には、大出力モータ4bのみを駆動し、第4領域の場合には、小出力モータ4aが最大トルクTamaxを出力する状態で2つのモータ4a,4bを駆動する。
(もっと読む)
モータ駆動システム
【課題】モータの切換え頻度を低減させ、トルク変動を抑制する。
【解決手段】車両に要求される出力が第1のモータの許容出力又は第2のモータの許容出力のうちいずれか小さい方の許容出力以下である場合、例えば所定の低負荷時に、第1のモータ及び第2のモータのうち低温側のモータを選択して作動させる(S80,S90,S100,S130)電動車両において、第1のモータと第2のモータとの温度差が第1の所定値Tβ未満であるときには、第1のモータから前記第2のモータへの切替又は第2のモータから第1のモータへの切替を禁止する(S120)。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走した軸とは異なる軸における空転滑走の誘発を適切に抑制させるための新たな方策を提案すること。
【解決手段】係数Kは、他軸において空転滑走の発生が検知されていない場合にはK=1とされ、検知された場合には、検知されてから時間Tpが経過するまでの制御パラメータ値変更期間Ppの間、K算出部51で算出された値とされる。この切り替えは、タイマー切替器53が行う。K算出部51は、他軸から入力される他軸情報に基づいて、他軸において空転滑走の発生が検知されたか否かを判定し、検知された軸がある場合にはその空転滑走軸と自軸との位置関係に基づいて係数Kを決定する。また、制御パラメータ値変更期間Ppの間、タイマー切替器54によって引き下げ制御値も変更される。他軸において空転滑走の発生が検知されていない場合には制御パラメータ標準値が選択され、制御パラメータ値変更期間Ppの間は制御パラメータ臨時値が選択される。
(もっと読む)
列車モニタ・データ伝送システムを有する列車制御装置
【課題】常に編成全体として粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる列車制御装置を提供すること。
【解決手段】先頭電動車の電気車制御装置B1で空転あるいは滑走を最初に検知すると、そのときの接線力係数Muj(B1)を推定し、この接線力係数と、先頭車から後方の車両における粘着係数の増大量データDeltaMujと、期待粘着係数Muz_expt等をもとに、各電気車制御装置B1,Ajにおける空車時のトルク指令値上限値Taujmaxz_aを求め、列車モニタ・データ伝送システム1を介して各電気車制御装置に対して伝送する。各電気車制御装置B1,Ajでは、上記トルク指令値上限値Taujmaxz_aから実際に発生すべきトルク指令値上限値Taujmax_actを求め、これを目標値として、各電気車制御装置の制御対象範囲の電動機でトルクを制御する。
(もっと読む)
車両駆動装置、電動車両、及び車両駆動装置の車両駆動方法
【課題】いずれか1つの駆動軸に係わる異常が発生した場合でも、当該異常発生に係わる軸を別の軸との駆動力のバランスをとりつつ駆動することで、必要最低限のバランスのよい走行を行う。
【解決手段】車両駆動装置1のモータ駆動部150は、モータ10,20に給電するためのサーボ制御部160,170と、異常検出部105と、を備え、モータ駆動部250は、モータ10,20に給電するためのサーボ制御部260,270と、異常検出部105と、を備え、モータ駆動部150の異常検出部105が異常を検出した場合に、サーボ制御部160,170からの給電を停止し;モータ駆動部250の異常検出部105が異常を検出した場合に、サーボ制御部260,270からの給電を停止するように、モータ駆動部150,250からのモータ10,20への給電態様を切り替えるバッファ191,192,193,194を設ける。
(もっと読む)
ハイブリッド車のエンジン制御装置
【課題】EV走行モードで車両が停止し、シフト操作装置が中立位置Nを経由した時はすぐにエンジンの自動始動をしないように制御すると共に、後進位置を経由した時はエンジンをすぐに停止させないように制御することにより、運転者が車両電気回路のメインスイッチのOFF操作の忘れ防止を図ると共に、不所望なエンジンの自動始動及び自動停止を防止して燃料及び、バッテリ電力の消費を抑制することを目的とする。
【解決手段】中立位置Nを経由して前進位置Dまたは、後進位置Rへの切換を行うよう構成されたシフト操作装置32と、メインスイッチ8と、該メインスイッチ8がON状態で、且つエンジン2が停止状態時に、シフト操作装置32が前進位置Dまたは、後進位置Rから中立位置Nへ切換えられ、中立位置Nに第一所定時間以上維持された場合はエンジン2を自動始動させる制御手段とを備えたことを特徴とする。
(もっと読む)
自動車の前後輪駆動装置
【課題】後輪駆動用の第2パワーユニットのモータの小型化を可能にして,第2パワーユニットのコンパクト化を図り,第2パワーユニットの車両への搭載性を良好にし得る自動車の前後輪駆動装置を提供する。
【解決手段】前輪2fを駆動する第1パワーユニット3fと,後輪2rを駆動する第2パワーユニット3rとを備え,その第2パワーユニット3rを,モータ10と,このモータ10の出力軸10aの出力を後輪2rに伝達する減速装置11とで構成した自動車の前後輪駆動装置において,後輪2rに,前記モータ10より小型の補助モータ15の出力軸15aをクラッチ17を介して連結すると共に,前記補助モータ15の出力軸10aにエアコンディショナ20のコンプレッサを直接的に連結し,前記クラッチ17の接続により,前記モータ10及び補助モータ15の出力を合算して後輪2rに伝達するようにした。
(もっと読む)
二つのモーターを有する電動車
【課題】 バッテリーの電圧が定格電圧よりも下がった場合でも、応急走行を可能とする電動車を提供する。
【解決手段】 バッテリーの電圧が定格電圧よりも下がった場合にでも、運転者が低出力モーターによる前輪駆動を選択した場合には、走行スピードはより低くなるが取り出し電力が増えることで応急走行を可能とする。
一般的にバッテリーは大電力を取り出すときよりも、低電力を取り出すときの方が、取り出し電力が増える特性を有する。このため、低出力モーターに切り替えると、走行スピードはより低くなるが、走行距離が増えることが期待できる。
(もっと読む)
ハイブリッド車両のモータ駆動システム及びその制御方法
【課題】非パワートレイン部品に対する保護及び故障防止を図ることができるハイブリッド車両のモータ駆動システム及びその制御方法を提供する。
【解決手段】モータ駆動システムは、車両走行のための第1及び第2モータと、第1及び第2モータを夫々駆動制御する第1及び第2インバータと、直流電源用バッテリーBと、バッテリーBから直流電圧を第1及び第2インバータに変圧させて供給し、第1又は第2インバータからの直流電圧をバッテリーB側に変圧させて供給する電圧コンバータと、バッテリーBと電圧コンバータとの間に連結された第1及び第2メインリレーと、バッテリーBと第1及び第2メインリレーとの間に、第1及び第2補助リレーを介して連結される直流変換装置及び電動式エアコンインバータとを含んで成る。
(もっと読む)
1 - 20 / 350
[ Back to top ]