
Fターム[5H115RB15]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | 複数電動機の制御 (1,114) | 前後の電動機の制御 (239)
Fターム[5H115RB15]に分類される特許
1 - 20 / 239
電気自動車
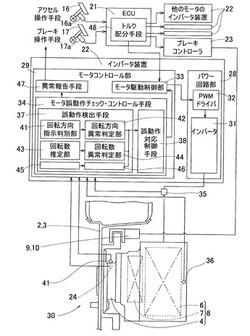
【課題】 モータが制御系のノイズ等で誤動作した場合に、瞬時にこれを判断して安全処置を採ることができる電気自動車を提供する。
【解決手段】 ECU21の出力するトルク指令と、モータ6またはこのモータ6で駆動される車輪2,3の回転信号、回転方向信号、およびモータ電流のいずれかとを常時監視し、この監視した情報を基に、定められた規則に従ってモータ6の誤動作を検出する誤動作検出手段37を設ける。この誤動作検出手段37で誤動作が検出されると前記モータ6への駆動電流の停止、および機械式ブレーキ9,10による制動のいずれかまたは両方を行わせる誤動作対応制御手段38を設ける。
(もっと読む)
電気自動車

【課題】 モータの永久磁石における減磁等の性能劣化が生じた場合に、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、異常対応モータ駆動制御手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、推定された磁力が設定許容範囲内であるか否かを判定する。異常対応モータ駆動制御手段40は、判定手段39による異常であるとの判定結果に応じて、インバータ装置22によるモータ駆動に制限を与える。
(もっと読む)
インホイールモータ車両の駆動装置
【課題】 小型化、軽量化、および低コスト化が可能なインホイールモータ車両の駆動装置を提供する。
【解決手段】 このインホイールモータ車両の駆動装置は、複数の駆動輪2A〜2Dのうち少なくとも2つの駆動輪に配置した複数のインホイールモータ部3A〜3Dと、これらのインホイールモータ部3A〜3Dをそれぞれ制御する複数のモータ駆動装置4A〜4Dとを備える。モータ駆動装置4A〜4Dは、平滑回路、制御部、インバータ部、およびこのインバータ部を冷却する冷却器からなる。前記複数のモータ駆動装置4A〜4Dを1箇所に集めて同一ケース7内に配置する。
(もっと読む)
電気自動車
【課題】 モータコイルの短絡異常を早期に検知し、車両走行上の問題を回避し得る電気自動車を提供する。
【解決手段】 電気自動車において、車輪2を駆動するモータ6は、3相の各モータコイルの一端が中性点で接続されるスター結線により結線された同期モータであり、モータコイルの短絡異常を検出する短絡異常監視手段95と、この短絡異常監視手段95で短絡異常が検出されると、前記中性点P1から各モータコイルを電気的に切断する異常時切断手段Esを設けた。
(もっと読む)
回生制動制御装置
【課題】回生式制動装置を備える車両において回生効率を向上させる。
【解決手段】回生制動制御装置24は、車両の前輪に回生制動力を伝達可能な第1回生制動手段56f、及び車両の後輪に回生制動力を伝達可能な第2回生制動手段56rの各々を制御する回生制動制御装置であって、第1回生制動手段及び第2回生制動手段の各々に要求される回生制動力の合計値である要求回生制動力を算出する要求回生制動力算出手段と、要求回生制動力を、第1回生制動手段及び第2回生制動手段で配分して実現する場合のエネルギ損失が、最も小さくなる配分比を算出する配分比算出手段と、算出された配分比で要求回生制動力を実現するように、第1回生制動手段及び第2回生制動手段を夫々制御する制御手段とを備える。
(もっと読む)
電動車両
【課題】複数のスイッチング素子の一部をオフからオンにできなくなるオフ異常が発生していないインバータにより駆動されるモータを用いて走行する状態に迅速に移行する機会を増やしつつ、オフ異常が発生していないインバータを判別する。
【解決手段】2つのモータが駆動されて走行している最中に、バッテリの充放電電流Ibが許容電流範囲外になって2つのインバータのうちのいずれかで1相オープン故障が発生したと判定されたときに(S100,S110)、第2モータのみが駆動されて走行する電動走行が行なわれるようにインバータを制御すると共に第1モータを駆動する方のインバータのゲート遮断を行なう(S120)。そして、電動走行が開始されてから所定時間tb1が経過するまでに充放電電流Ibが許容電流範囲外になったか否かによって、いずれのインバータに1相オープン故障が発生しているかを判定する(S130〜S180)。
(もっと読む)
電動車両
【課題】正転・逆転のいずれか一方の回転方向のみに対して効率が高められた電動機を駆動力源として、生産性の低下やコストアップを招くことなく、効率を向上させることが可能な電動車両を提供すること。
【解決手段】少なくとも2つの電動機5,6を備えた電動車両Veにおいて、電動機5,6を、一方の回転方向への力行時における効率が他方の回転方向への力行時における効率および回生時における効率よりも高くなるように構成するとともに、後輪の駆動力を発生させる電動機6を、前進用電動機6として正転力行時における効率が逆転力行時における効率および回生時における効率よりも高くなるように配置し、前輪の駆動力を発生させる電動機5を、後進・回生用電動機5として逆転力行時における効率および回生時における効率が正転力行時における効率よりも高くなるように配置した。
(もっと読む)
電動車両
【課題】電動車両の各車輪を個別に駆動・制動・操舵等を行うことにより、運転者が意のままに車両の挙動をコントロールし、いわば「人馬一体」の運転が実現できるようにすることである。
【解決手段】左右又は前後に配置された一対の車輪13、前記車輪13を駆動するモータ16、ブレーキ装置18、操舵装置19及び前記各装置のコントローラ21を備えた電動車両において、前記モータ16、ブレーキ装置18、操舵装置19及びコントローラ21が車輪13ごとに個別に設けられた構成とした。
(もっと読む)
電動車両のモータ制御装置
【課題】要求トルクを確保しつつモータの発熱をより効果的に抑制する上で有利な電気自動車のモータ制御装置を提供する。
【解決手段】第1の駆動制御手段50Aは、フロントモータ18およびリアモータ20から出力される駆動トルクをそれぞれ第1、第2の駆動トルクとしたとき、運転者の走行用操作により要求される要求トルクをモータ18、20の全体としての効率が最大となるように第1、第2の駆動トルクに分配して各モータを駆動制御する。判定手段50Bは、第1、第2の駆動トルクの一方が基準トルクを超過した時間が所定時間以上であるか否かを判定する。第2の駆動制御手段50Cは、所定時間以上であると判定されたときに、所定時間T0以上であると判定されたモータの駆動トルクを基準トルクよりも減少させると共に、他方のモータの駆動トルクを増大させることにより要求トルクを満足させる。
(もっと読む)
車両の制動力制御装置
【課題】 制動時における回生電力の回収効率の向上と車輪のロック状態の早期の回復とを両立させる車両の制動力制御装置を提供すること。
【解決手段】 電子制御ユニット26は、各輪11〜14がロックする傾向を有するとき、蓄電装置20を構成するバッテリのバッテリ容量Yが小さければ左右前輪11,12に設けられたインホイールモータ15,16を回生状態により作動させてモータ制動トルクを発生させるとともに左右後輪13,14に設けられたインホイールモータ17,18を力行状態により作動させてモータ駆動トルクを発生させる。一方、ユニット26は、容量Yが大きければ前輪11,12に設けられたモータ15,16を力行状態により作動させてモータ駆動トルクを発生させるとともに後輪13,14に設けられたモータ17,18を回生状態により作動させてモータ制動トルクを発生させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】燃料劣化に起因するエンジンの始動不良の発生を抑制することができると共に燃費の低下も抑制することができるハイブリッド車両の制御装置を提供する。
【解決手段】通常は、燃料の劣化が判定された際に充電閾値を高くなるように変更するが、燃料タンク内の燃料残量が所定の第1の閾値量よりも少ないことが検出された際には、所定の充電閾値の変更を禁止する。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走した軸とは異なる軸における空転滑走の誘発を適切に抑制させるための新たな方策を提案すること。
【解決手段】係数Kは、他軸において空転滑走の発生が検知されていない場合にはK=1とされ、検知された場合には、検知されてから時間Tpが経過するまでの制御パラメータ値変更期間Ppの間、K算出部51で算出された値とされる。この切り替えは、タイマー切替器53が行う。K算出部51は、他軸から入力される他軸情報に基づいて、他軸において空転滑走の発生が検知されたか否かを判定し、検知された軸がある場合にはその空転滑走軸と自軸との位置関係に基づいて係数Kを決定する。また、制御パラメータ値変更期間Ppの間、タイマー切替器54によって引き下げ制御値も変更される。他軸において空転滑走の発生が検知されていない場合には制御パラメータ標準値が選択され、制御パラメータ値変更期間Ppの間は制御パラメータ臨時値が選択される。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
自動走行台車
【課題】駆動装置に過負荷が加わることを避け得る自動走行台車を提供する。
【解決手段】制御装置2からの走行信号に基づいて第一車輪5aを回転させる第一トルクを制御する第一駆動装置1aと、第一駆動装置1aからの同調信号に基づいて第二車輪5bを回転させる第二トルクを制御する第二駆動装置1bを有する自動走行台車1であって、制御装置2は、第二駆動装置1bの異常時に受信する第二切離し信号に基づいて、第二駆動装置1bを制御して第二トルクをゼロとしかつ走行信号に含まれる速度設定値を変更して第一駆動装置1aを制御して第一トルクを調整する。制御装置2は、第一駆動装置1aの異常時に受信する第一切離し信号に基づいて、第一駆動装置1aを制御して第一トルクをゼロとしかつ速度設定値を変更しかつ第二駆動装置1bを同調信号に替えて前記設定値を含む走行信号に基づいて制御して第二トルクを調整する。
(もっと読む)
電動駆動車両
【課題】制御部における制御を簡素化することができ、発電装置を小型化することができるとともに、発電効率を高くすることができるようにする。
【解決手段】蓄電装置と、発電装置と、駆動モータ11と、経路を設定する経路設定処理手段と、前記経路を走行する際の消費エネルギーを算出する消費エネルギー算出処理手段と、前記経路を走行する際の走行時間を算出する走行時間算出処理手段と、前記蓄電装置の現在の残存容量、残存最小容量及び消費エネルギーに基づいて、蓄エネルギーを算出する蓄エネルギー算出処理手段と、前記消費エネルギー及び蓄エネルギーに基づいて、発電条件が成立するかどうかを判断する発電条件成立判断処理手段と、発電条件が成立する場合に、前記発電装置によってほぼ一定の出力で発電を行う発電処理手段とを有する。負荷に応じて発電装置の出力を調整する必要がない。
(もっと読む)
電動機の制御装置
【課題】熱電素子により電動機を効果的に冷却できるとともに、その熱電素子による発電電力を効率良く利用して全体の電力消費量を低減することが可能な電動機の制御装置を提供する。
【解決手段】電力を供給することにより吸熱面と放熱面との間で熱を移動させる熱移動状態と、前記吸熱面と前記放熱面との間の温度差に応じた電力を発生させる発電状態とを選択的に切り替えて制御可能な熱電素子を用いて冷却を行う電動機の制御装置において、運転者が前記電動機を駆動する意志の有無を検出する駆動意志検出手段(ステップS1,S2)と、前記駆動意志検出手段により前記電動機を駆動する意志がないことを検出した場合に、前記熱電素子を前記発電状態に制御する熱電素子制御手段(ステップS6)とを設けた。
(もっと読む)
車両の制御装置
【課題】車輪ロックを速やかに検出し、その後の車両の走行状態を安定的に維持させることが可能な車両の制御装置を提供すること。
【解決手段】複数の駆動輪毎に設けられて該駆動輪の駆動軸に付与するトルクを個別に制御可能な電動機を備えた車両の制御装置において、前記各駆動軸の回転速度を検出する駆動軸回転検出手段(ステップS11〜S12)と、前記各電動機の出力軸の回転速度を検出する電動機回転検出手段(ステップS11〜S13)と、前記各駆動軸の回転速度の速度変化および前記各出力軸の回転速度の速度変化に基づいて前記各電動機から前記各駆動輪へ至る各駆動系統での車輪ロックの有無を判断する車輪ロック検出手段(ステップS11〜S13)と、該車輪ロックが検出された前記駆動系統における前記駆動軸の前記速度変化方向と同方向のトルクを該駆動系統における前記電動機から出力する出力制御手段(ステップS14)とを設けた。
(もっと読む)
車両の制御装置
【課題】外部からの過大入力に起因する異常を速やかに検出するとともに、その後の車両の挙動を安定的に維持させることが可能な車両の制御装置を提供すること。
【解決手段】複数の駆動輪毎に設けられて該駆動輪の駆動軸に付与するトルクを個別に制御可能な電動機を備えた車両の制御装置において、前記各駆動軸の回転速度をそれぞれ検出する駆動軸回転検出手段(ステップS1)と、前記各電動機の出力軸の回転速度をそれぞれ検出する電動機回転検出手段(ステップS1)と、前記各駆動軸の回転速度の速度変化および前記各出力軸の回転速度の速度変化に基づいて前記各電動機から前記各駆動輪へ至る各駆動系統におけるフェールの有無を判断するフェール検出手段(ステップS1)と、前記各駆動軸と前記各出力軸の前記速度変化の比較結果に基づいて前記各電動機の出力を制御する出力制御手段(ステップS2〜S5)とを設けた。
(もっと読む)
車両の制御装置
【課題】外部からの過大な入力に起因する異常を速やかに検出し、電動機および駆動系統の損傷を未然に防止することが可能な車両の制御装置を提供すること。
【解決手段】少なくとも3つの車輪を有するとともにそのうちの少なくとも左右一対の車輪に付与するトルクをそれぞれ個別に制御可能な電動機を備えた車両の制御装置において、前記各車輪の車輪速度を検出する回転速度検出手段(ステップS1)と、前記回転速度検出手段により検出した前記各車輪の車輪速度の速度変化に基づいて、前記各車輪のいずれか1つの車輪に走行路面側から入力される過大なトルクを検出する外乱検出手段(ステップS1)とを設けた。
(もっと読む)
車両用駆動装置
【課題】電動機の駆動や回生が不要な場合に電動機の連れ回りを防止でき、且つ、簡易な構成で断接手段の応答性を向上させることが可能な車両用駆動装置を提供する。
【解決手段】シンクロメッシュ機構駆動装置70が、回転運動をする回動部材73と、直線運動をする並進部材74A、74Bと、回動部材73に接続され回動部材73を駆動する電動モータ72と、回動部材73の回転運動を並進部材74A、74Bの直線運動に変換させる運動変換機構75と、を備え、電動モータ72によって回動部材73を順方向に回転させることで、並進部材74A、74Bを一方側に移動させてシンクロメッシュ機構60A、60Bを動力遮断状態とし、電動モータ72によって回動部材73を逆方向に回転させることで、並進部材74A、74Bを他方側に移動させてシンクロメッシュ機構60A、60Bを動力伝達状態とする。
(もっと読む)
1 - 20 / 239
[ Back to top ]