
Fターム[5H115RB14]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | 複数電動機の制御 (1,114) | 左右の電動機の制御 (407)
Fターム[5H115RB14]に分類される特許
1 - 20 / 407
車両の姿勢制御装置
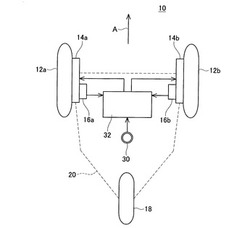
【課題】走行面の凹凸、横風、急旋回動作等によって生じるロール振動を抑制することができる技術を提供する。
【解決手段】 この車両10は、車体20の左右に回転可能に取付けられている2つの駆動輪12a,12bを異なる駆動トルクで駆動可能となっている。この車両は、車体20のロール振動を抑制する姿勢制御装置32を備えている。姿勢制御装置32は、車体20のロール角を検出するロール角検出手段30と、ロール角検出手段で検出されるロール角の微分値に基づいて、左右の駆動輪に駆動トルク差が生じるように各駆動輪を駆動する制御部を有している。
(もっと読む)
作業車両

【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
インホイールモータ車両の駆動装置
【課題】 小型化、軽量化、および低コスト化が可能なインホイールモータ車両の駆動装置を提供する。
【解決手段】 このインホイールモータ車両の駆動装置は、複数の駆動輪2A〜2Dのうち少なくとも2つの駆動輪に配置した複数のインホイールモータ部3A〜3Dと、これらのインホイールモータ部3A〜3Dをそれぞれ制御する複数のモータ駆動装置4A〜4Dとを備える。モータ駆動装置4A〜4Dは、平滑回路、制御部、インバータ部、およびこのインバータ部を冷却する冷却器からなる。前記複数のモータ駆動装置4A〜4Dを1箇所に集めて同一ケース7内に配置する。
(もっと読む)
電気自動車
【課題】 車両の運転を急激に妨げることなく、インバータの過熱による特性変化および損傷を防止し、モータ駆動の制御特性の変化や、モータ駆動の不能を防止することができ、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、ECU21と、直流電力をモータ6の駆動に用いる交流電力に変換するインバータ31を含むパワー回路部28およびECU21の制御に従って少なくともパワー回路部28を制御するモータコントロール部29を有するインバータ装置22とを備えている。インバータ31に、このインバータ31の温度Tcを検出する温度センサSaを設け、温度センサSaで検出される温度Tcが閾値を超えたとき、温度Tcを時間tで微分したdTc/dtが0以下になるまでインバータ31に与える電流指令に制限を加えるインバータ制限手段95を設けた。
(もっと読む)
電気自動車
【課題】 モータコイルの短絡異常を早期に検知し、車両走行上の問題を回避し得る電気自動車を提供する。
【解決手段】 電気自動車において、車輪2を駆動するモータ6は、3相の各モータコイルの一端が中性点で接続されるスター結線により結線された同期モータであり、モータコイルの短絡異常を検出する短絡異常監視手段95と、この短絡異常監視手段95で短絡異常が検出されると、前記中性点P1から各モータコイルを電気的に切断する異常時切断手段Esを設けた。
(もっと読む)
電気自動車
【課題】 モータが制御系のノイズ等で誤動作した場合に、瞬時にこれを判断して安全処置を採ることができる電気自動車を提供する。
【解決手段】 ECU21の出力するトルク指令と、モータ6またはこのモータ6で駆動される車輪2,3の回転信号、回転方向信号、およびモータ電流のいずれかとを常時監視し、この監視した情報を基に、定められた規則に従ってモータ6の誤動作を検出する誤動作検出手段37を設ける。この誤動作検出手段37で誤動作が検出されると前記モータ6への駆動電流の停止、および機械式ブレーキ9,10による制動のいずれかまたは両方を行わせる誤動作対応制御手段38を設ける。
(もっと読む)
電気自動車
【課題】 電気制御式の操舵機構の異常や、左右の駆動輪のモータ駆動系の異常に対し、操舵機構と左右個別のモータとによる旋回走行の相互補完機能を利用し、上記異常の発生時に、ドライバーの意図した方向に進めるように制御できる電気自動車を提供する。
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
(もっと読む)
電気自動車
【課題】 モータがトルク制御不能となった場合に、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、ECU21と、インバータ装置22とを備えている。インバータ装置22におけるモータコントロール部29に回転数制御する回転数制御手段37を設け、前記モータコントロール部29によるトルク制御の異常を検出するトルク制御異常検出手段38と、この手段38によりトルク制御の異常の判定出力に応答して前記モータコントロール部29を前記回転数制御手段37による回転数制御に切り替える制御方式切替手段39とを設けた。
(もっと読む)
電気自動車
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、このモータ6を制御する制御装置とを備えている。前記モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設け、この温度センサSaで検出される温度Tcが閾値を超えたとき、この温度Tcを時間tで微分したdTc/dtが0以下になるまでモータ6の電流値を低減するモータ電流低減手段95を設けた。
(もっと読む)
電気自動車
【課題】 モータの永久磁石における減磁等の性能劣化が生じた場合に、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、異常対応モータ駆動制御手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、推定された磁力が設定許容範囲内であるか否かを判定する。異常対応モータ駆動制御手段40は、判定手段39による異常であるとの判定結果に応じて、インバータ装置22によるモータ駆動に制限を与える。
(もっと読む)
電気自動車
【課題】 車輪用軸受、モータ、減速機等の異常に対して、適切な車両の駆動が行えて、車輪用軸受、モータ、減速機等の信頼性確保が行える電気自動車を提供する。
【解決手段】 ECU21およびインバータ装置22を備えた電気自動車において、トルク変動量推定手段37をインバータ装置22に設ける。トルク変動量推定手段37は、車輪回転数を検出する回転センサ24もしくはモータ6の角度センサ36から得られる回転数の変動量、荷重センサ41が検出する路面・タイヤ間の車両進行方向の荷重の変動量、またはモータ電流の変動量から、車輪用軸受4、モータ6、または減速機7に起因するトルク変動を含むトルク変動量を、定められた規則により推定する。
(もっと読む)
倒立二輪車
【課題】複数の状態センサ間の個体差による検知データのバラツキによって発生する無駄な消費電力を抑える。
【解決手段】相互に電気的に絶縁された第1巻線22及び第2巻線23を有し、駆動輪を回転させるための第1モータ4と、第1駆動系6と、第2駆動系7と、を備える。第1駆動系6は、第1状態センサ12と、第1制御回路11を有する。第2駆動系7は、第2状態センサ17と、第2制御回路16を有する。第1駆動系6の第1状態センサ12の第1検知データと、第2駆動系7の第2状態センサ17の第2検知データは、第1駆動系6と第2駆動系7の間で共有される。第1駆動系6の第1制御回路11は、共有している検知データに基づいて第1モータ4の第1巻線22への電力供給を制御する。第2駆動系7の第2制御回路16は、共有している検知データに基づいて第1モータ4の第2巻線23への電力供給を制御する。
(もっと読む)
車両の駆動装置
【課題】とくに径方向に嵩張らない画期的な構造のモータを使用し、モータが径方向に嵩張らないようにして最低地上高を確保しつつ、左右の駆動輪の駆動に必要なトルクを発生する。
【解決手段】左右の駆動輪2l、2rを駆動するモータ8が、ソレノイド部3から左右それぞれに延びた左右の分配磁路部材6l、6rと、左右の分配磁路部材の分枝した複数の端部が外周に配置されて回転界磁を形成し、駆動輪2l、2rそれぞれを駆動するロータ4l、4rと、左右の分配磁路部材6l、6rそれぞれの相間を磁気的に調整する左右の磁束調整手段5l、5rとを備え、ロータ4l、4rの内周や外周にステータを配置しないようにして径方向に嵩張らない画期的な構造に形成し、最低地上高を確保しつつ、左右の駆動輪2l、2rの駆動に必要なトルクを発生する。
(もっと読む)
電動アシスト台車及び台車の電動アシストユニット
【課題】作業者の操作に応じて違和感なく駆動力がアシストされる電動アシスト台車を提供する。
【解決手段】荷台3を介して荷物を載置可能な車体フレーム1と、作業者によって押圧操作される操作ハンドル5と、操作ハンドル5の押圧操作に応じてアシスト力を付与する電動アシストユニット50とを備え、電動アシストユニット50は、車体フレーム1の下面に取り付けられる本体部20と、左右に間隔をあけて本体部20に設けられる一対の駆動輪11と、操作ハンドル5に連結されるとともに本体部20に取り付けられ車体フレーム1の左右二箇所に作用する駆動トルクを検出する一対のトルクセンサ6と、本体部20に取り付けられトルクセンサ6によって検出された駆動トルクに応じて駆動輪11に付与するアシスト力を演算するコントローラ30と、コントローラ30によって演算されたアシスト力を各々の駆動輪11に付与する一対の電動モータ15とを備える。
(もっと読む)
倒立振子型移動体
【課題】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら走行制御が行われる倒立振子型移動体において、搭乗者の意思に基づく操縦モードと、搭乗者の意思に基づかない自動運転モードとを実現することができる倒立振子型移動体を提供する。
【解決手段】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら車体の走行制御が行われる倒立振子型移動体において、制御装置から出力される操作信号に従って搭乗者の重心位置を調節するための重心位置調節手段を備え、制御装置は、搭乗者の意思に基づかないで所定の走行制御を行う自動運転モードへの切り換え指令が生成されたときに、目標となる走行状態が実現される重心位置となるように重心位置調節手段を制御し、重心位置に基づく走行指令に従って車輪駆動手段の制御を行う。
(もっと読む)
電気駆動車両
【課題】車両のピッチング振動を大きくさせることなく駆動輪のスリップを抑制できる電気駆動車両を提供すること。
【解決手段】電動機1,4と、電動機により駆動される駆動輪3,6と、駆動輪にスリップが発生するときに電動機のトルクを低減させ、当該スリップ解消後に電動機のトルクを回復させる電動機制御装置40とを備えた電気駆動車両において、車両に発生するピッチング振動の振幅を検出するピッチング検出装置26を備え、スリップ解消後に電動機制御装置が一定時間に回復させる電動機のトルク量は、ピッチング検出装置で検出された振幅Aが判定値A1以下の場合と判定値A1を超える場合とで異なっている。
(もっと読む)
電動車両
【課題】正転・逆転のいずれか一方の回転方向のみに対して効率が高められた電動機を駆動力源として、生産性の低下やコストアップを招くことなく、効率を向上させることが可能な電動車両を提供すること。
【解決手段】少なくとも2つの電動機5,6を備えた電動車両Veにおいて、電動機5,6を、一方の回転方向への力行時における効率が他方の回転方向への力行時における効率および回生時における効率よりも高くなるように構成するとともに、後輪の駆動力を発生させる電動機6を、前進用電動機6として正転力行時における効率が逆転力行時における効率および回生時における効率よりも高くなるように配置し、前輪の駆動力を発生させる電動機5を、後進・回生用電動機5として逆転力行時における効率および回生時における効率が正転力行時における効率よりも高くなるように配置した。
(もっと読む)
電動車両
【課題】電動車両の各車輪を個別に駆動・制動・操舵等を行うことにより、運転者が意のままに車両の挙動をコントロールし、いわば「人馬一体」の運転が実現できるようにすることである。
【解決手段】左右又は前後に配置された一対の車輪13、前記車輪13を駆動するモータ16、ブレーキ装置18、操舵装置19及び前記各装置のコントローラ21を備えた電動車両において、前記モータ16、ブレーキ装置18、操舵装置19及びコントローラ21が車輪13ごとに個別に設けられた構成とした。
(もっと読む)
前後輪駆動車両
【課題】車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
(もっと読む)
電気自動車駆動方式。
【課題】電気自動車の駆動方式に於いて、デフギアーを使用せず、左右独立した動力源をモータにて車輪に駆動力を伝達し、安定走行、経済性、かつ環境適合を目指す電気自動車の左右独立駆動方式。
【解決手段】左右に独立して設けた駆動用のモータ1の駆動力は、該モータ1に取付けたタイミングプーリー3(モータ1用)より、タイミングベルト4を介し、左右のドライブシャフト6に取付けたタイミングプーリー5(ドライブシャフト6用)に伝わり、前記左右のドライブシャフト6が駆動し、該左右のドライブシャフト6に連結した車輪2に駆動力が伝達され、車輛は駆動する事が出来る。
(もっと読む)
1 - 20 / 407
[ Back to top ]