
Fターム[5H115SE03]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | 電気機械 (3,767) | 電動機 (1,820)
Fターム[5H115SE03]に分類される特許
1 - 20 / 1,820
車両の姿勢制御装置
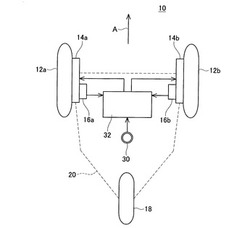
【課題】走行面の凹凸、横風、急旋回動作等によって生じるロール振動を抑制することができる技術を提供する。
【解決手段】 この車両10は、車体20の左右に回転可能に取付けられている2つの駆動輪12a,12bを異なる駆動トルクで駆動可能となっている。この車両は、車体20のロール振動を抑制する姿勢制御装置32を備えている。姿勢制御装置32は、車体20のロール角を検出するロール角検出手段30と、ロール角検出手段で検出されるロール角の微分値に基づいて、左右の駆動輪に駆動トルク差が生じるように各駆動輪を駆動する制御部を有している。
(もっと読む)
インホイールモータ車両の駆動装置

【課題】 小型化、軽量化、および低コスト化が可能なインホイールモータ車両の駆動装置を提供する。
【解決手段】 このインホイールモータ車両の駆動装置は、複数の駆動輪2A〜2Dのうち少なくとも2つの駆動輪に配置した複数のインホイールモータ部3A〜3Dと、これらのインホイールモータ部3A〜3Dをそれぞれ制御する複数のモータ駆動装置4A〜4Dとを備える。モータ駆動装置4A〜4Dは、平滑回路、制御部、インバータ部、およびこのインバータ部を冷却する冷却器からなる。前記複数のモータ駆動装置4A〜4Dを1箇所に集めて同一ケース7内に配置する。
(もっと読む)
電気自動車
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、このモータ6を制御する制御装置とを備えている。前記モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設け、この温度センサSaで検出される温度Tcが閾値を超えたとき、この温度Tcを時間tで微分したdTc/dtが0以下になるまでモータ6の電流値を低減するモータ電流低減手段95を設けた。
(もっと読む)
ハイブリッド自動車
【課題】内燃機関を始動する際の振動の発生を抑制する。
【解決手段】エンジンを始動する際に、クランキングトルクTmbのトルクレートΔTmbが正の閾値A1よりも大きい状態が所定時間以上に亘って継続し且つ制振トルクTmvの位相とトルクレートΔTmbの符号とが共に正で一致しているときや、トルクレートΔTmbが負の閾値B1未満の状態が所定時間以上に亘って継続し且つ制振トルクTmvの位相とトルクレートΔTmbの符号とが共に負で一致しているときには、値0よりも大きく値1よりも小さい補正ゲインGA,GBを乗じて制振トルクTmvを補正し(S140〜S220)、クランキングトルクTmbと制振トルクTmvとの和のトルクをモータMG1から出力すべきトルク指令Tm1*に設定する(S240)。
(もっと読む)
ハイブリッド自動車
【課題】第1の電動機が値0を含む所定回転数範囲を脱出する制御としての保護制御が作動したときに生じ得るショックを低減する。
【解決手段】モータ回転数Nm1の絶対値が所定回転数以下の状態となるロック状態に至ったときには、モータを所定回転数Nref2または所定回転数Nref2を負の値にした回転数で回転させるようにエンジンの目標回転数Ne*や目標トルクTe*とモータの目標回転数Nm1*とを設定すると共に(S170〜S200)、モータがロック状態に至ってからの経過時間が長いほど大きくなるカウンタCに応じた値kcをモータの回転数フィードバック制御における積分項のゲインk2として用いる(S220)。これにより、ロック状態からの脱出を滑らかに行なうことができ、ロック状態からの脱出の際に生じ得るショックを抑制することができる。
(もっと読む)
ハイブリッド自動車
【課題】内燃機関の始動制御中に内燃機関の停止が要求されたときでも内燃機関をよりスムーズに停止させる。
【解決手段】エンジンの始動制御を実行している最中にその停止が要求されたときには(S110)、停止制御開始回転数に基づいてレートリミットTlimを設定すると共にエンジンの現在の回転数Neに基づいて停止時基本トルクTsbを設定し、前回のモータMG1のトルク指令(前回Tm1*)からレートリミットTlimを減じたトルクと停止時基本トルクTsbとのうち大きい方をモータMG1から出力すべきトルク指令Tm1*に設定してモータMG1を制御する(S170〜S230)。これにより、エンジンの回転数Neをスムーズに減少させ、ショックを伴うことなくエンジンを目標停止位置により正確に停止させることができる。
(もっと読む)
回転電機
【課題】回転電機本体を収容するケーシング内外のシール性を簡易な構造で確保するとともに、組み付け性を向上し、かつ高圧部と低圧部との間の沿面距離を増加させた回転電機を提供する。
【解決手段】回転電機本体40の電源端子92をボルト82により端子台60に締結した後、カバー部材80をケーシング46に装着することで、開口部78がシール部80cによりシールされる。シール時に電力線30の端子120とバスバー110とをケーシング46の外部で締結して導電させるナット104がケーシング46に自動的に配置される。バスバー110の組み付け後の状態において、ナット104の導電部P(高圧部)と、ケーシング46の導電部Q(接地電位)との間の沿面距離Dcが、ボルト122の締結時における応力を分散する除肉凹部96の沿面距離分長くなる。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】エンジンの始動頻度を低減することのできるハイブリッド車両の駆動制御装置を提供すること。
【解決手段】車両1の走行時における動力源としてエンジン5と電動機であるMG2とが用いられると共にMG2は発電機能を備えており、さらに、エンジン5を停止させた状態で車両1を走行させることができるハイブリッド車両の駆動制御装置2において、エンジン5を停止させた状態での車両1の走行であるEV走行時に、車両1が走行している道路の情報に基づいてMG2の温度を予測し、予測したMG2の温度が所定値以上になる場合には、MG2による発電を禁止する。これにより、EV走行時におけるMG2の温度上昇を抑制することができ、エンジン5を始動させて潤滑油を循環させることにより行うMG2の冷却が必要になる頻度を低減することができる。この結果、エンジン5の始動頻度を低減することができる。
(もっと読む)
倒立二輪車
【課題】複数の状態センサ間の個体差による検知データのバラツキによって発生する無駄な消費電力を抑える。
【解決手段】相互に電気的に絶縁された第1巻線22及び第2巻線23を有し、駆動輪を回転させるための第1モータ4と、第1駆動系6と、第2駆動系7と、を備える。第1駆動系6は、第1状態センサ12と、第1制御回路11を有する。第2駆動系7は、第2状態センサ17と、第2制御回路16を有する。第1駆動系6の第1状態センサ12の第1検知データと、第2駆動系7の第2状態センサ17の第2検知データは、第1駆動系6と第2駆動系7の間で共有される。第1駆動系6の第1制御回路11は、共有している検知データに基づいて第1モータ4の第1巻線22への電力供給を制御する。第2駆動系7の第2制御回路16は、共有している検知データに基づいて第1モータ4の第2巻線23への電力供給を制御する。
(もっと読む)
車両の制御装置
【課題】クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】伝達トルク容量を発生するクラッチと、クラッチをスリップ制御すると共に、走行モード中に車両停止状態と判定されたときは、指令油圧を初期指令油圧から低下させて、補正後指令油圧を設定する車両停止時伝達トルク容量補正手段と、実トルク変化量に基づいて勾配切換油圧を設定する勾配切換油圧設定手段と、補正後指令油圧を設定する前に、解放判定時指令油圧から所定のトルク発生前半勾配で勾配切換油圧まで指令油圧を上昇させ、勾配切換油圧に到達した後はトルク発生前半勾配よりも小さなトルク発生後半勾配で指令油圧を上昇させる指令油圧上昇手段と、を備えた。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両の駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御する。
【解決手段】HVECU70は、SMR55をオフするバッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、MG1およびMG2が電力制御トルクを出力したときと、出力しないときとの間での駆動軸32aに出力可能なトルク範囲の差分を算出し、さらに、当該差分の時間軸に対する変化量を制約した値を反映して駆動トルクの上下限範囲を定める。MG1およびMG2のトルク指令値は、当該上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように設定される。
(もっと読む)
制御装置、ハイブリッド自動車および制御方法、並びにプログラム
【課題】電動機による発進に際し、ドライバビリティの違和感を改善させること。
【解決手段】ハイブリッド自動車1が電動機13により発進するのに際し、予め設定されているハイブリッド自動車1のアクセルペダル22の踏み込み量に応じた電動機13の回転速度に基づいて電動機13の回転速度を制御するハイブリッドECU18を構成する。
(もっと読む)
電動車両の制御装置
【課題】電動モータを回転数制御からトルク制御に切り替える際、アクセル操作と自動変速機の変速種により判別される走行シーンに対応し、走行シーン毎に異なる要求性能を達成すること。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータ2と、モータ制御切り替え手段としての統合コントローラ20と、自動変速機3と、モータトルク変化処理手段としてのモータコントローラ22と、を備える。モータコントローラ22は、モータジェネレータ2の制御を回転数制御からトルク制御に切り替える際、アクセル操作と自動変速機3の変速種により判別される走行シーンが、駆動力レスポンスが要求される走行シーンであるほど大きな値のトルク変化率を選択し、ショック低減が要求される走行シーンであるほど小さな値のトルク変化率を選択し、モータトルク差分を、選択したトルク変化率で変化する目標モータトルクにより繋ぐ。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電気システム内部での過電圧等の電圧異常の発生を防止することによって走行距離を確保することである。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、MG1およびMG2のトルク上下限範囲に基づいて、MG1およびMG2の出力トルクによって発生できる電力線54の電力変化量の上下限範囲を設定するとともに、電力線54の電圧VHを電圧指令値に近付けるために必要な前記電力変化量の指令値を算出する。HVECU70は、さらに、指令値と上下限範囲との比較に基づいて、MG1およびMG2の出力トルクによる電力制御の可否を判定する。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】アクセルペダルが踏み込まれた状態でハイブリッド車両が減速走行するときに部品保護やエネルギ効率の改善を図る。
【解決手段】モータ出力パワーPmg1が閾値Pref以上であってモータMG1が比較的高い回転数で回転しながら正のトルクを出力しており(ステップS130)、モータMG2の回転数変化量ΔNm2が閾値ΔNref未満であり(ステップS150)、かつモータMG2の回転数Nm2が閾値Nref未満である場合(ステップS160)、運転者によりアクセルペダルとブレーキペダルとの双方が同時に踏み込まれたのに伴ってモータMG1およびモータMG2の双方が電力を消費して正のトルクを出力するとみなされ、モータMG2に対するトルク指令Tm2*が減少側に補正される(ステップS170)。
(もっと読む)
車載用電気システム
【課題】複数の駆動装置を有する電気回路において共用する部品を備えるものにおいて、高度な制御を不用として、複数の駆動装置の作動時に発生し得る共用部品への干渉を回避可能とする車載用電気システムを提供する。
【解決手段】車載用電気システムにおいて、制御部150は、複数の駆動部131、132によって複数の電動機141、142を同時に駆動させる際に、第1電動機141用の電圧信号における第1キャリア周波数fpwm1に対して、第2電動機142用の電圧信号における第2キャリア周波数fpwm2が同一となるとき、第2キャリア周波数fpwm2を第1キャリア周波数fpwm1に対して異なる値に設定して、駆動部131、132を制御するようにする。
(もっと読む)
ハイブリッド車両のエンジン停止制御装置
【課題】非走行レンジ選択中に第1クラッチ締結状態でイグニッションスイッチをOFFした時のモータの負トルクが車両の音振性能を悪化させないエンジン停止を実現する。
【解決手段】非走行レンジ選択中に(S15)、第1クラッチ締結状態のまま(S13)、イグニッションスイッチOFFにより(S11)、暖機後アイドル回転数Neidを超えた高回転(S17)でエンジンを停止させる場合、S19でエンジン回転数Neをアイドル回転数Neidへと低下させた後にエンジンを停止させるが、この際、モータの目標回転数tNmを所定の変化割合ΔNmで低下させ、モータ回転数Nmがこの目標tNmに追従するよう目標モータトルクtTmを定めてモータの制御をする。これにより、エンジン回転低下時における目標モータトルクtTmの変化量が、目標モータトルクtTmを音振許容トルク範囲内の値よりも大きくすることのない程度に抑制される。
(もっと読む)
自動車
【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
車両の駆動装置
【課題】とくに径方向に嵩張らない画期的な構造のモータを使用し、モータが径方向に嵩張らないようにして最低地上高を確保しつつ、左右の駆動輪の駆動に必要なトルクを発生する。
【解決手段】左右の駆動輪2l、2rを駆動するモータ8が、ソレノイド部3から左右それぞれに延びた左右の分配磁路部材6l、6rと、左右の分配磁路部材の分枝した複数の端部が外周に配置されて回転界磁を形成し、駆動輪2l、2rそれぞれを駆動するロータ4l、4rと、左右の分配磁路部材6l、6rそれぞれの相間を磁気的に調整する左右の磁束調整手段5l、5rとを備え、ロータ4l、4rの内周や外周にステータを配置しないようにして径方向に嵩張らない画期的な構造に形成し、最低地上高を確保しつつ、左右の駆動輪2l、2rの駆動に必要なトルクを発生する。
(もっと読む)
ハイブリッド車両用電動モータ駆動装置及び該装置を備えたハイブリッド車両
【課題】 簡単かつ安価で軽量コンパクトな構成でありながら、既存の自動二輪車等の車両の動力伝達系に対して変更を伴うことなく、良好に電動モータの出力を駆動力として作用させることができるハイブリッド車両を提供する。
【解決手段】 本発明に係るハイブリッド車両は、内燃機関2と電動モータ20とを動力源として備えるハイブリッド車両1であって、電動モータ20により車輪11に駆動力を付与する電動モータ駆動装置10が、車輪11の車軸と略平行な回転軸廻りに回転可能に構成され、少なくとも1つの車輪11の外周付近に当接する駆動ローラ15と、駆動ローラ15を駆動する電動モータ20と、を含んで構成されることを特徴とする。
(もっと読む)
1 - 20 / 1,820
[ Back to top ]