
Fターム[4C096DC22]の内容
磁気共鳴イメージング装置 (34,967) | 画像処理 (5,620) | 画像からの計測又は解析 (747)
Fターム[4C096DC22]の下位に属するFターム
Fターム[4C096DC22]に分類される特許
141 - 160 / 225
医用3Dデータ画像表示面を互いに関係づけるための方法及び装置
医療データ画像表示面を互いに関係づける方法が提供される。この方法は、少なくとも1つの3次元(3D)医療画像データセットにおいて少なくとも2つの非直交2次元(2D)画像表示面を規定し、一定の関係をもって2D画像表示面を互いにリンクづけして、2D画像表示面のうちの第1のものが変わったとき、残りの2D画像表示面が、第1の2D画像表示面に対してその一定関係により自動的に変化させられるようにしている。 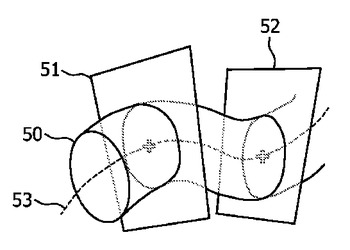 (もっと読む)
(もっと読む)
ヒト血流データをもとにした血流解析装置及びシミュレーション方法
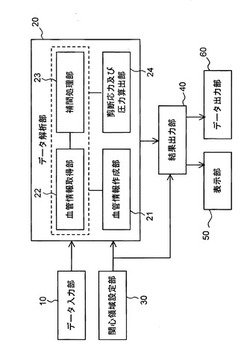
【課題】インビボでの血流動態解析を行い血管壁剪断応力及び圧力を求めることができる血流解析装置、血流シミュレーション方法、及びプログラムを提供する。
【解決手段】空間3次元と時間から成る4次元の速度3成分ベクトル情報をもつヒト血流データが入力されるデータ入力部10と、入力されたデータから4次元の速度3成分ベクトル情報を取得し、当該4次元の速度3成分ベクトル情報に基づいて血管壁剪断応力及び圧力を算出するデータ解析部20と、データ解析部での解析により得られた血管壁剪断応力及び圧力などの解析結果を表示する表示部50を有する。
(もっと読む)
左右対称の器官系の三次元画像の評価方法、医用画像撮影システムおよびコンピュータプログラム

【課題】左右で異なる状態を自動的に検出するために、左右対称の器官系の三次元画像の評価が広い部分で自動化される方法を提供する。
【解決手段】三次元画像(1)で左右対称の器官系(11)をセグメント化し、セグメント化された器官系(11)を変形させて、変形された器官系(11’)がその外形に関して鏡面対称な2つの半分となるようにし、変形された器官系(11’)の鏡面対称な両半分間の相違(17)を、一方の半分と他方の半分との比較に基づいて求め、求められた相違(17)を表示する。
(もっと読む)
医用画像表示装置
【課題】 被検者の体表面上の穿刺治具挿入範囲と安全な穿刺領域を自動的に設定して、オペレータの作業時間の低減と負担を軽減すると共に余裕のある穿刺治具の穿刺挿入範囲と穿刺領域を表示する医用画像表示装置を提供する。
【解決手段】 検査条件を設定し(S1)、検査部位を撮像して断層画像データを収集し(S2)、断層画像をディスプレィに表示する(S3)。この表示画像上に穿刺対象中心位置と被検体表面から穿刺対象中心位置までの領域を設定する(S4、S5)。この設定した領域を撮像し、被検体表面から穿刺対象部までの断層画像データを収集する(S6)。この収集した画像データの画素値から保護対象を識別し(S7)、穿刺針挿入経路に保護対象があるか否かの安全性を判定して穿刺領域を求め(S8)、被検体表面の全ての線分からの挿入経路と保護対象までの距離を計算して穿刺針挿入開始範囲の決定する(S9)。そして、穿刺針挿入開始範囲と穿刺領域をディスプレィに表示する(S10)。
(もっと読む)
構造のモデルを作成する方法
幾つかの対象物のスキャンデータから生体構造の一部のモデルを作成する方法が開示される。この方法は、スキャンデータを収集する段階;スキャンデータに特徴検出器を適用する段階;特徴検出器の出力を共通の基準座標系に変換する段階;及び変換されたデータを累積してモデルを生成する段階を有する。この方法は、故に、幾つかの対象物のスキャンデータから自動的にモデルを作成することができる。この方法はまた、必要に応じて、累積されたデータの何れが最終的なモデルに含められるべきかを選択するユーザ入力を受け取る段階を含んでいてもよい。このユーザ入力は、手作業での輪郭抽出より遙かに少ない労力のみを必要とし、また、モデルを作成するために使用される対象物の数とは実質的に無関係である。  (もっと読む)
(もっと読む)
カテゴリー型インデクスからの画像のデータベースの作成のためのシステム、方法及び装置
【課題】医用解剖学的画像から、より一貫性があり、統一された形式を有し、信頼性の高い医学的状態及び疾患の診断を提供する。
【解決手段】本システム100は正常画像データベース102を含んでいる。正常画像データベース102は無疾患の解剖学的構造の画像を含んでいる。正常な解剖学的画像を標準化して解剖学的特徴を抽出する構成要素104と、抽出された解剖学的特徴画像を平均するもう一つの構成要素106とによって生成される。抽出された解剖学的特徴の画像(1又は複数)と正常画像データベース102内の画像との間の比較を行なう構成要素110を含んでいる。比較は静的比較作業フロー112を生ずる。比較は、特定の解剖学的特徴に特異的なZスコアのデータベース114を生ずる。比較は、縦断的比較作業フロー116を生ずる。縦断方向は時間方向としても知られる。縦断的比較は、一定の時間区間にわたって画像を比較する。
(もっと読む)
画像診断・治療支援装置及び治療効果判定用画像データ生成方法
【課題】 治療前後の画像データを用い精度の高い治療効果判定を行なう。
【解決手段】 画像診断・治療支援装置100の信号検出部1は、治療前及び治療後の患者に対し3次元超音波走査を行なって画像信号(受信信号)を検出し、画像データ生成部2は、前記受信信号に基づいて治療前の第1の画像データ(ボリュームデータ)と治療後の第2の画像データ(ボリュームデータ)を生成する。一方、領域設定部4は、前記第1の画像データにおける病巣部の形状情報に基づいて表示領域を設定し、効果判定用画像データ生成部5は、第1の画像データの前記表示領域における治療前の3次元血流情報と第2の画像データの前記表示領域における治療後の3次元画像データを合成して治療効果判定用画像データを生成し表示部6に表示する。
(もっと読む)
手術支援装置
【課題】手術ロボット装置のロボットアームに、耐荷重を超える負荷が加わるのを防止することのできる手術支援装置を提供する。
【解決手段】被検体の臓器について面像を撮像する撮像部と、臓器重量演算部とを有する手術支援装置とする。臓器重量演算部は、撮像部が撮像した臓器についての画像から臓器の重量を演算し、臓器重量が、被検体を手術するために配置された手術ロボット装置のロボットアームに予め定められた耐荷重を超えているかどうかを判定し、判定結果を報知する。これにより、操作者は、術前に臓器重量が耐荷重を超えているかどうか知ることができるため、臓器重量が耐荷重を超えている場合には術前にロボットアームを交換する等の対策をとることができる。
(もっと読む)
心臓撮像の運動補正方法および装置
【課題】モーションアーチファクトを一層減らすことのできるようにする。
【解決手段】心臓の少なくとも1つの領域の複数の画像が複数の心周期を含む時間内に撮像機器により記録され、引き続きこれらの画像が互いに結び付けられて組合せ画像データセットが生成され、画像撮影中に測定装置により、心臓のベクトル心電図(VCG)を作成するための測定データが検出され、これらの測定データから心周期間の心臓の空間位置および方位の変化が算出されかつ画像を結び付ける際に考慮されて、組合せ画像データセット中の、心臓の空間位置および方位の変化に起因した誤りが低減される
(もっと読む)
画像診断支援装置、及び画像診断支援プログラム
【課題】 高解像度の画像データから得られる診断対象の微細構造情報を利用した診断支援が可能な画像診断支援装置等を提供すること。
【解決手段】 高解像度の画像データから得られた診断画像において、診断対象の微細構造における形状の特徴と疾病との関係を表すパラメータを数値化し、これに基づいて癌の発生部位、癌の発育様式等を判別する。従って、肺癌診断の場合には、ルーペによる病理像とほぼ対応させ、腫瘤の性状・病変と既存肺構造との関係に関する評価を用いて、終末細気管支の小型腺癌か肺胞領域の小型腺癌かを判別でき、小型腺癌の画像所見から細胞型分類候補を自動抽出する。
(もっと読む)
立体グラフィカル画像から表面をレンダリングする方法
立体3次元画像データを3次元表面データに変換する方法は、まず、表面変換の前に、立体画像の主表面に付着した無関係のボクセルと、主画像の周囲の無関係のボクセルとを除去する(210)ことにより、立体画像の表面を平滑化する。立体画像が表面画像に変換されると、方法は、周囲のトポグラフィに関して考慮した場合に不適当に見える、あらゆる著しく急な山型の構造を除去する(840)ことにより、表面をクリーニングする。表面画像をレンダリングするために必要なデータの量は、周囲のトポグラフィの平面閾値内にある表面小面を除去する(130)ことによって低減される。トポグラフィはまた、局所エリアにおいて中間レベルに向かうように圧縮される。方法はさらに、この時閾値限界内にある可能性のあるさらなる表面小面を低減するように繰り返してもよい(140)。  (もっと読む)
(もっと読む)
医用画像表示方法及び医用画像診断装置
【課題】造影剤の通過により、血流動態を検出する灌流画像に対して、脳室や病変部に左右されることなく、診断に必要な部位に適切なウインドウ幅・ウインドウレベルを自動的に計算し表示可能な医用画像診断装置を実現する。
【解決手段】造影剤が通過しない脳室部分等を除外したヒストグラムを度数が高い画素部分302を頂上部分とするガンマ関数で近似処理する。ガンマ関数により近似された曲線は指数分布的曲線となり、最小画素値307から画素部分302及び点線306を通り最大画素値308までの曲線で、画素部分303付近の画素が除外される。ガンマ関数により近似されたヒストグラムの最小画素値307と最大画素値308とからウィンドウ幅309、ウィンドウレベル310を決定し、灌流画像311を表示する。灌流画像311は灌流画像診断に必要な脳実質312の画素が最適なコントラストで表示される。
(もっと読む)
画像処理方法および画像処理プログラム
【課題】少ない計算量で、複数のフェーズの画像における異常を検出することができる画像処理方法および画像処理プログラムを提供する。
【解決手段】算出した構造情報を利用して異常箇所を検出する。図は、パスの分岐の位置、数、枝の長さや位置を比較することにより、異常箇所を検出する様子を示す。すなわち、フェーズNの構造情報Nでは、分岐a2,a3が存在するが、前のフェーズN−1および後のフェーズN+1には対応する分岐が存在しないことを検出する。また、フェーズNの構造情報Nでは、前のフェーズN−1に存在する分岐a1、および後のフェーズN+1に存在する分岐a5が、対応する箇所a4に存在しないことを検出する。
(もっと読む)
イメージングに対する多重造影剤注入
MRIに基づく分子イメージングは、造影剤の正確な定量化により強力にサポートされる。本発明の模範的実施例によると、造影剤は、多重注入投与スキームに基づいて投与され、この間に緩和速度の変化が決定される。これは、MRI緩和測定法により腫瘍血管増生の正確な決定を提供することができる。  (もっと読む)
(もっと読む)
画像診断装置、画像診断システム
【課題】断続的な撮影間の関連を確保することを可能とする画像診断装置及び画像診断システムを提供する。
【解決手段】X線CT装置1は、初回撮影で取得した可視光3D画像51−1、特徴量52−1、X線単純撮影画像61、X線3D画像63−1等を多角的にデータベース化して記録保存する(ステップ107)。2回目以降撮影処理では、X線CT装置1は、現在の可視光3D画像51−2及び特徴量52−2と、過去の撮影でデータベース化された可視光3D撮影画像51−1及び特徴量52−1とを照合する(ステップ203)。X線CT装置は、照合結果に基づいて現在の可視光3D撮影画像51−2と過去のX線単純撮影画像61やX線3D画像63−1とを画像融合する(ステップ204)。
(もっと読む)
核磁気共鳴撮影装置
【課題】パラレル核磁気共鳴撮影方法を動きのある画像にも適用可能とし、画質の劣化がなく診断に有効な画像を高速で提供する。
【解決手段】空間的に一部分をオーバーラップしかつ互いに区分された検出感度領域を有する複数の受信コイルを用いたMRI装置において、高周波パルスによる横磁化発生に続き、エコー信号を連続して計測する。連続して計測したエコー信号の一部を用いて、各受信コイルの感度分布を計算し、計算した感度分布と連続計測したエコー信号とを用いて画像を再構成する。
(もっと読む)
組織グリコーゲンの非侵襲性MRI測定法
選択された単糖もしくは多糖(例えば、グルコースもしくはグリコーゲン)についての情報を導出するための方法において、選択された修飾(例えば、飽和)が、選択された単糖もしくは多糖のヒドロキシル基のプロトンの磁気共鳴周波数において磁気共鳴から作製される。立証的水プロトン磁気共鳴データは、上記選択された修飾が実質的に有効である間に取得される。情報は、立証的水プロトン磁気共鳴データに少なくとも基づいて、選択された単糖もしくは多糖の濃度もしくは密度について導出される。  (もっと読む)
(もっと読む)
MRイメージングによって体内式デバイスをトラッキングする方法及びシステム
【課題】SNR並びに空間分解能及び時間分解能を犠牲にすることなく体内式デバイスをトラッキングすることが可能なシステム及び方法を提供すること。
【解決手段】体内式デバイスの位置のトラッキングさもなければ位置決定のためのシステム及び方法を提供する。本発明は、被検体内に挿入されるデバイスであって、該デバイスに含めた撮像可能なタグに基づいてトラッキングを受け得るデバイスを含む。撮像可能タグは、少なくともその一部が偏向磁場を受けたときにその原子核が水素のラーモア周波数と異なるラーモア周波数で歳差運動する物質から形成されている。MRデータは、その物質のラーモア周波数に合わせてチューニングしたRF受信器を用いており、かつ被検体内部でデバイスの動きをトラッキングするために使用される撮像可能タグから収集することができる。
(もっと読む)
オブジェクトの仮想モデルを該オブジェクトにマッピングするための方法およびシステム
患者の部分(10)の走査画像から形成される仮想モデル(100)を、該患者のその部分10にマッピングするための方法および装置。プローブ(74)がそこへ取り付けられたカメラ(72)は、カメラ(72)によって取り込まれるその部分(10)のビデオ画像が、ビデオ画面(80)上でその画面(80)に固定されて示されている仮想モデルと一致するように見えるまで、患者の該部分(10)を基準にして動かされる。実座標系(11)の中の該カメラ(72)の該位置が感知される。該画面(80)上の該仮想モデル(100)のビューを概念的に取り込む仮想カメラを基準にした該仮想モデル(100)の仮想座標系(110)の中の該位置は、所定且つ公知である。これから、該患者の該部分(10)を基準にした該仮想モデル(100)の該位置がマッピングでき、該仮想モデル(100)とほぼ一致するように該患者の該部分(10)を該仮想座標系(110)の中に配置するために変形が生成できる。このような初期位置合わせプロセスの完了後、第2の精密な位置合わせプロセスが、分析中の該患者の該部分の該表面で多数の実ポイントを獲得することによって開始できる。このようなポイントは、次に、第2のさらに正確な変形を生成するために反復最近点測度を使用して処理できる。この精密位置合わせプロセスは反復でき、終了条件が満たされるまでますます多くの正確な変形が生成できる。このプロセスによって生成される最終的な変形を使用して、該仮想モデル(100)は、該患者の該部分(10)と実質的に正確に一致するように該実座標系(100)の中に配置できる。 (もっと読む)
手術支援装置
【課題】 手術時に変更される内視鏡の位置に応じてリアルタイムで、内視鏡位置に対応する周辺臓器や血管の画像を術具位置とともに重畳表示することが可能な手術支援装置を提供する。
【解決手段】 手術支援装置は、内視鏡の位置を逐次検出する三次元位置検出装置と内視鏡の映像に重畳される手術支援画像を作成する画像作成部とを備え、位置検出装置において内視鏡の位置座標と画像作成部が作成する画像の座標とを統合する座標統合手段が備えられている。画像作成部は、MRI等で撮像された被検体の三次元ボリューム画像データを用いて内視鏡の映像に重畳される手術支援画像を作成する。座標統合されているので、内視鏡の位置や向きが変更されても、それとの相対位置が保たれた状態で、リアルタイムで内視鏡の向きに合わせた手術支援画像を重畳表示することができる。
(もっと読む)
141 - 160 / 225
[ Back to top ]