
Fターム[4C601GA21]の内容
Fターム[4C601GA21]の下位に属するFターム
アームジョイント (33)
ポテンショメータ (6)
加速度センサ (32)
磁気センサ (171)
エコー利用 (53)
振動子を取り付けるもの (10)
振動子の回転位置の検出 (93)
Fターム[4C601GA21]に分類される特許
21 - 40 / 136
超音波診断システム及び超音波診断・治療システム
【課題】既存の超音波画像形成装置を活用して臓器等の立体画像を形成し、また治療用超音波を照射対象へ容易に合わせ込むことができる、したがって非侵襲でありながら正確な診断と治療ができる、超音波診断システム及び超音波診断・治療システムを提供する。
【解決手段】超音波画像形成装置が出力する超音波断層画像から輪郭を抽出した後、プローブの三次元座標情報に基づいて輪郭データを仮想三次元空間内に配置する。輪郭データを複数取得して補間演算を実施すると、仮想三次元空間内に臓器の三次元画像を形成できる。また、トランスデューサと超音波照射対象との配置状態を仮想三次元空間で表示するだけでなく、トランスデューサの焦点と超音波照射対象との距離を測距画像で視覚的に示すことで、合焦作業が極めて簡易になり、医師の治療行為を大幅に助けることができるのみならず、治療の精度を大幅に改善する。
(もっと読む)
超音波診断装置

【課題】簡易な構成で比較的高画質な超音波画像を得る。
【解決手段】超音波診断装置2の検査部10には、超音波トランスデューサ(UT)ユニット15、形状計測ユニット16、およびこれらを被観察部位Cに対して水平方向に移動させるベルトコンベア17が配されている。UTユニット15は、5個の超音波トランスデューサUTa25〜UTe29が凸曲面上に配列されたUTアレイ22を有し、被観察部位Cに超音波走査を行う。形状計測ユニット16は、レーザー光源37および受光器38を有し、被観察部位Cの形状を計測する。プロセッサ部11の主制御部60は、形状計測の結果に基づき、UTa25〜UTe29のうち、被観察部位Cに超音波が垂直に当たり得るUTをUTユニット15の移動位置に応じて選択駆動させる。
(もっと読む)
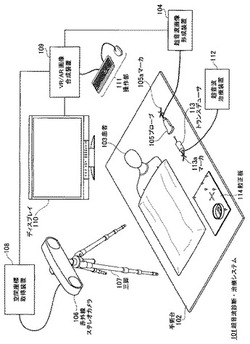
光位置検知を使用した撮像及び治療のための装置、システム並びに方法
位置を決定するための装置、システム及び方法は、コンソール104から信号を受信し、反射波に基づいて画像を生成するためのトランスデューサ装置102を含む。可撓性のケーブル108は、コンソールからトランスデューサ装置へ励起エネルギーを供給するために、トランスデューサ装置に結合される。光ファイバ110は、オペレーションの間、ケーブルの形状及び位置に対応する形状及び位置を持つ。複数のセンサ122は、光ファイバと光通信する。光ファイバの偏向及び曲りがトランスデューサ装置についての位置情報を決定するために使用されるように、センサは、光ファイバの偏向及び曲りを測定する。  (もっと読む)
(もっと読む)
超音波カテーテル
【課題】 超音波カテーテルにおいて、超音波カテーテルとしての性能を損なわずに、X線透視下における超音波振動子の位置の把握を可能とする。
【解決手段】 体腔或いは管腔内に挿入して用いられる長尺なカテーテルシース2と、該カテーテルシース2内に内蔵され該カテーテルシース2の手元側から先端側まで機械的駆動力を伝達し、先端端部が段付き加工を施された段付き加工部を備えた駆動シャフト10と、該駆動シャフト10の先端側に接続された超音波振動子及び/または超音波反射板を備えたハウジング11と、を備え、駆動シャフトを外部駆動源により回転させる超音波カテーテル1において、前記駆動シャフト10の先端側端部にX線造影性投与手段12が設置され、前記駆動シャフト10の前期段付き加工部が前記ハウジング11の内側に一部重なり合って接続され、X線造影性投与手段12がこの重なりの間に設置されていることを特徴とする超音波カテーテル1。
(もっと読む)
情報処理装置、情報処理方法、情報処理システム、及びプログラム
【課題】 三次元画像データ中の病変部に対応する部位を、他の断層画像から探索して同定する作業を容易にする。
【解決手段】 三次元画像データを取得する三次元画像データ取得手段と、前記三次元画像データ中の注目領域の位置を取得する位置取得手段と、断層画像を取得する断層画像取得手段と、前記断層画像の姿勢を取得する姿勢取得手段と、前記位置と姿勢とに基づいて三次元画像データから断面画像を生成する断面画像取得手段と、前記断層画像と前記断面画像を併せて表示する表示手段とを備える。
(もっと読む)
超音波およびX線システムの組み合わせ
本発明は、2D透視画像において介入デバイスを検出および追跡し、超音波プローブ・ビームをこのデバイスのほうに方向制御することを提案する。したがって、超音波プローブが透視画像において位置合わせされる方法および対応するシステムが提案される。位置合わせは、透視検査に対するプローブの位置および配向を推定することを含む。
 (もっと読む)
(もっと読む)
超音波映像処理を行う超音波システムおよび方法
【課題】本発明は、超音波プローブの動き程度を推定し、推定された動き程度に基づいて超音波映像に映像補正のための映像処理を行うシステムおよび方法に関する。
【解決手段】本発明における超音波システムは、超音波信号を送受信する超音波プローブを備え、前記超音波プローブを用いて対象体に対する複数の超音波データを取得する超音波データ取得部と、前記超音波データ取得部に連結されて、前記複数の超音波データを用いて複数の超音波映像を形成し、前記超音波プローブの動き(motion)程度を推定し、前記動き程度に基づいて前記複数の超音波映像に映像補正のための映像処理を行うプロセッサとを備える。
(もっと読む)
複数方向の超音波スキャンを同期するための方法、システムおよびコンピュータ読み取り可能な記録媒体
【課題】複数方向の超音波スキャンを同期するだめの方法、システムおよびコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】複数方向の超音波スキャン(44、50)が同期される(46)。複数のウォブラアレイが連続的に使用される。動きに起因するアーチファクトを制限するため、連続的動作が同期される(46)。第1のウォブラアレイのスキャン中(44)、第2のウォブラアレイは移動しているかまたはアクティブである。第1のウォブラアレイがスキャンを全部または一部を完了すると、第2のウォブラアレイが移動の開始を待つことなくスキャンを開始する(50)。その代わりにまたはそれに加えて、第2のアレイの位置は第1のアレイまたは第1のアレイのスキャン終了と同期する。異なるスキャンからのデータはボリュームの重なりを表し、拡大された視野を形成するよう結合することができる(52)。
(もっと読む)
超音波診断装置
【課題】被検体内部の音響インピーダンスの差が一定以上ある部位で発生するアーチファ
クト現象を利用して異常部位の硬さを推定する超音波を提供する。
【解決手段】本発明の超音波診断装置は、異常部位に接触させる超音波探触子の形状や接
触角度等を調節することにより、アーチファクト現象を意図的に発生させ、前記アーチフ
ァクト現象の類別を行う。前記アーチファクト現象の類別と実際のアーチファクト現象の
画像と正常の超音波画像または過去に蓄積したアーチファクト現象画像とから異常部位の
硬さを推定する。
(もっと読む)
超音波診断装置
【課題】発熱規制を遵守した状態でS/Nに優れた画像データを収集する。
【解決手段】超音波プローブ1のプローブ方向検出部13は、複数の振動素子が配列されたプローブヘッド部11を揺動させることによって被検体に対する3次元走査を可能とする超音波プローブ1の鉛直方向に対する傾斜角度を検出する。一方、診断装置本体2の駆動電圧設定部26は、超音波送信条件及び超音波プローブの傾斜角度を付帯情報として予め保管された駆動電圧とプローブヘッド部11の被検体接触面における上昇温度との関係を示す各種相対温度データの中から当該超音波検査に対応した相対温度データを超音波送信条件に基づいて抽出し、得られた相対温度データと前記傾斜角度の検出結果及び発熱規制に基づいて予め設定された許容相対温度とに基づいて前記振動素子に対する駆動電圧を設定する。
(もっと読む)
超音波画像を三次元座標システムに登録するシステム
【課題】内部解剖学的構造を画像化するシステムを提供すること。
【解決手段】解剖学的構造の超音波画像データを第1の座標システム内で得て、グラフィカルデータ(例えば、興味のある部位)を第2の座標システム内で得る。第1の座標システムと第2の座標システム内の超音波トランスデューサの位置が決定され、第1及び第2の座標システム間の変換が、第1及び第2の座標システム内の超音波トランスデューサの位置に基づいて実行される。この変換を用いて、第1の座標システム内ですでに得ている超音波画像データを、グラフィカルデータと共に第2の座標システム内に登録して表示することができる。
(もっと読む)
超音波診断装置
【課題】同一画面に表示された他の診断装置のリファレンス像と超音波像の対応関係の把握を容易にする。
【解決手段】超音波探触子の位置及び傾きを検出する位置センサ108と、位置センサの出力に基づいて超音波像のスキャン面座標を算出するスキャン面座標算出手段109と、算出されたスキャン面座標を記憶するスキャン面座標系記憶手段110とを備え、リファレンス像生成手段111は、スキャン面座標系記憶手段から超音波像のスキャン面座標を読み出し、ボリューム画像データからスキャン面座標に対応する断層像データを読み出してリファレンス像を再構成し、シネメモリ106から超音波像を読み出すと共に、読み出した超音波像に対応するリファレンス像を画面114に表示する。
(もっと読む)
超音波診断装置
【課題】同一画面に表示された他の診断装置のリファレンス像と超音波像の対応関係の把握を容易にする。
【解決手段】超音波探触子の位置及び傾きを検出する位置センサ108と、位置センサの出力に基づいて超音波像のスキャン面座標を算出するスキャン面座標算出手段109と、算出されたスキャン面座標を記憶するスキャン面座標系記憶手段110とを備え、リファレンス像生成手段111は、スキャン面座標系記憶手段から超音波像のスキャン面座標を読み出し、ボリューム画像データからスキャン面座標に対応する断層像データを読み出してリファレンス像を再構成し、シネメモリ106から超音波像を読み出すと共に、読み出した超音波像に対応するリファレンス像を画面114に表示する。
(もっと読む)
超音波診断装置
【課題】同一画面に表示された他の診断装置のリファレンス像と超音波像の対応関係の把握を容易にする。
【解決手段】超音波探触子の位置及び傾きを検出する位置センサ108と、位置センサの出力に基づいて超音波像のスキャン面座標を算出するスキャン面座標算出手段109と、算出されたスキャン面座標を記憶するスキャン面座標系記憶手段110とを備え、リファレンス像生成手段111は、スキャン面座標系記憶手段から超音波像のスキャン面座標を読み出し、ボリューム画像データからスキャン面座標に対応する断層像データを読み出してリファレンス像を再構成し、シネメモリ106から超音波像を読み出すと共に、読み出した超音波像に対応するリファレンス像を画面114に表示する。
(もっと読む)
超音波診断装置
【課題】把持部の回転によって、体腔内用超音波探触子の先端から形成される走査面の向きが特定しにくくなる。
【解決手段】振動子アレイ20aは超音波探触子10の挿入部の先端に配置され、モータ36によって挿入部の軸の両側に揺動することができる。その揺動角ηはモータ36に設けられる回転角検出器の出力信号Sηに基づいて検出される。超音波探触子10は把持部の姿勢を検知する姿勢センサ60を備え、その出力信号Sφに基づいて、挿入部の軸の周りにおける把持部14の回転角φを検出することができる。これら揺動角η、回転角φの情報に基づいて、電子走査面の向きが検出される。検出された電子走査面の向きの情報は超音波診断装置本体の表示器88に表示される。
(もっと読む)
超音波探触子及び超音波診断装置
【課題】超音波探触子の向きを簡易に確認でき得る超音波探触子を提供する。
【解決手段】超音波探触子12は、前記超音波を送受波する複数の振動素子からなる振動子アレイ40と、前記振動子アレイ40を収容する振動子ケース48と、前記振動子ケース48内に設けられた発光体50と、を備える。発光体50は、前記振動子ケース48のうち、前記超音波の送波方向と略平行な方向に光を発して当該振動子ケース48の一部を照射する。検査者は、この光の照射位置を確認することで、暗所であっても、超音波探触子の向き(いずれが超音波送受波面側か)を容易に目視で把握できる。
(もっと読む)
超音波診断装置
【課題】観察すべき部位を見落とすことなく適切に撮影することができる超音波診断装置を提供する。
【解決手段】被診断画像のモデル画像MIを準備しておく。超音波プローブによって被診断器官の各部の撮影と並行してその撮影時間を被診断器官の部分ごとに累積し、その累積値に応じてモデル画像MIの各部を色分けして、プローブ像PIの現在位置とともにカラーディスプレイ上に表示する。このディスプレイ上には超音波プローブで現在撮影された超音波像も表示される。診断者は当該器官の各部分の撮影履歴を色の相違によって視覚的に知ることが可能であるため、超音波によって観察すべき部位を見落とすことなく適切に撮影を行うことができる。
(もっと読む)
超音波診断装置
【課題】超音波診断装置において、現在撮像している部位に応じた最適なプローブを確実に使用できるようにする。
【解決手段】身体の各部位と該身体部位の撮像に適した超音波プローブとの対応関係を表すプローブ適合情報を記憶した適合情報記憶手段20と、超音波プローブ11の位置を検出するプローブ位置検出手段16と、プローブ位置検出手段16で検出された現在のプローブ11の位置、並びに予め生成された被検体の三次元データ及び該三次元データ中の各部分領域が前記被検体のいずれの身体部位に相当するかを表す部位情報に基づいて、現在撮像している身体部位を特定する撮像部位特定手段17と、前記プローブ適合情報を参照して、現在使用しているプローブ11が前記撮像部位特定手段17で特定された身体部位の撮像に適したものであるか否かを判定するプローブ適合判定手段19とを設ける。
(もっと読む)
超音波診断装置
【課題】組織の運動方向に合わせてバイプレーンの最適な回転位置を設定する。
【解決手段】バイプレーンである走査面セットは第1走査面及び第2走査面によって構成される。走査面セット(又は一方の走査面)が試行的に回転走査される。各回転角度において注目組織の計測が行われ、その計測結果に基づいて走査面セットの適正回転角度が判定される。その適正回転角度に走査面セットが位置決められる。
(もっと読む)
超音波診断装置及びプローブ
【課題】超音波診断において、プローブを保持している手の向きを自動的に認識できるようにし、電子走査の方向を最適化する。
【解決手段】プローブ10におけるケース16の外側には接触検出器18が設けられている。接触検出器18は手36の接触領域を表す二次元画像を出力する面状のセンサである。二次元画像に対して連結処理、細線化処理、端特定処理、親指特定処理の各工程を実行することにより、親指を表す位置及び親指の方向が認識され、それに従って保持方向情報として親指走行方向が判定される。それに基づいて、アレイ振動子上における電子走査方向が自動的に決定される。
(もっと読む)
21 - 40 / 136
[ Back to top ]