
Fターム[4L056EA32]の内容
Fターム[4L056EA32]に分類される特許
1 - 20 / 49
特殊糸の製造方法
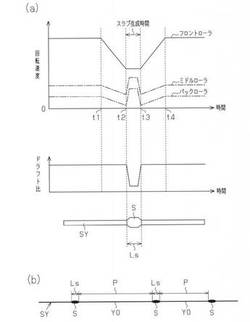
【課題】短いスラブを生成するためにフロントローラの急激な減速及び加速を行うための電磁クラッチあるいは容量の大きなモータを必要とせずに、生産性を殆ど落とすことなく短いスラブを有する特殊糸を製造する。
【解決手段】フロントローラとバックローラとがそれぞれ別の可変速モータで駆動されるドラフトパートを有する紡機を用い、スラブの生成動作前に糸の太さを変えずに、一時的にフロントローラ及びバックローラを減速させ、紡出速度を通常紡出時よりも遅くした状態にし、その状態からスラブ生成動作を行う。
(もっと読む)
繊維機械システム及び繊維機械

【課題】同じ工場内の機台の稼働データをより正確に分析可能な繊維機械システムを提供する。
【解決手段】繊維機械システムは、複数の繊維機械を備え、各繊維機械は、少なくとも1つの繊維処理ユニットと、前記繊維処理ユニットの稼働データを収集及び管理する管理装置と、を備え、前記各管理装置は、繊維処理ユニットの稼働データを表示する表示部と、他の繊維機械の管理装置と前記稼働データを送受信する通信部と、を有し、前記表示部は、複数の繊維機械の繊維処理ユニットの稼働データを、同時に表示可能である。
(もっと読む)
糸巻取機及び糸巻取ユニット
【課題】巻き取り開始直後の糸速度を正確に取得可能な糸巻取機を提供する。
【解決手段】精紡機は、巻取装置13と、紡績装置9と、ロータリエンコーダ機構と、糸継装置43と、継目モニタ47と、台車制御部と、を備えている。巻取装置13は、パッケージ45に紡績糸10を巻き取る。紡績装置9は、巻取装置13に紡績糸10を供給する。ロータリエンコーダ機構は、パッケージ45の回転速度を検出するためのものである。糸継装置43は、紡績装置9とパッケージ45との間の紡績糸10を糸継ぎして継ぎ目99を形成する。継目モニタ47は、紡績糸10の走行方向で糸継装置43の下流側に配置され、継ぎ目をモニタする。台車制御部は、ロータリエンコーダ機構の検出結果に基づいて取得した紡績糸10の走行速度と、継目モニタ47によるモニタ結果と、に基づいて、糸継装置43が形成した継ぎ目が正常であるか否かを判断する。
(もっと読む)
紡績機、巻取装置、及び繊維機械
【課題】回転体の周期的な異常を検出することができ、検出精度の向上を図ることが可能な紡績機、巻取装置、及び繊維機械を提供すること。
【解決手段】ドラフトする又は巻き取るための回転体を駆動するモータのトルク及び回転速度の少なくとも一方を監視し、この監視結果に基づいて、回転体の周期的な異常の有無を判定する構成とする。例えば、回転体の回転に伴って移動する繊維束に、周期的に太さが異なるなどの異常がある場合には、モータに作用する負荷トルクが変動したり、モータの回転速度が変動したりする。そのため、モータのトルク及び回転速度の少なくとも一方を監視することで、回転体の周期的な異常の有無を判定し、回転体によってドラフト又は巻き取られる繊維束の周期的な異常を検出することができる。
(もっと読む)
紡績機
【課題】紡績機において、紡績糸のテンションを精度良く検出できる構成を提供する。
【解決手段】スピニングセンサ52は、紡績装置と巻取装置との間で、走行する紡績糸10のテンションを検出する。またスピニングセンサ52は、走行する紡績糸10を接触させる糸ガイド60と、糸ガイド60に加わった力に応じた信号を出力する歪みセンサと、を備える。糸ガイド60は、少なくとも紡績糸10に接触する部分において、軸線64に直交する断面における断面輪廓形状が略円弧状に形成されている。糸ガイド60の上流側の紡績糸10aの糸道に平行な方向をY軸方向、ドラフトローラの軸方向に平行な方向をX軸方向、Y軸方向及びX軸方向に直交する方向をZ軸方向とする。Z軸方向で見たときに、糸ガイド60の軸線64は、Y軸方向に対して斜めに配置されている。
(もっと読む)
繊維機械および繊維機械の操作方法
【課題】繊維材料がコイラープレート等の貯蔵デバイスによって繊維機械の排出口の領域において決められた供給量で缶内に貯蔵される練条機、梳綿機、または、コーマーを操作するための方法に関する。
【解決手段】缶内に存在する繊維材料と貯蔵デバイスとが接触するとすぐに繊維材料の貯蔵時にセンサー11によって電気信号が生成され、そして、貯蔵デバイスの供給量がこの電気信号を使用して制御される。貯蔵デバイスは缶内に存在する繊維材料と貯蔵デバイスとが接触するとすぐに電気信号を生成するように実装された少なくとも1つのセンサー11に関連しており、このセンサー11が上記電気信号を使用して貯蔵デバイスの供給量を制御するために実装されたコントローラに接続される。
(もっと読む)
糸巻取装置用の回路基板及び糸巻取装置
【課題】巻取部の異常振動を正確に検出する。
【解決手段】糸巻取ユニット1用の回路基板105は、回路基板本体105aと、回路基板本体105aに設けられた振動検出チップ109とを備えている。
(もっと読む)
糸走行情報取得装置及び糸巻取機
【課題】正確な糸走行情報を取得することができる糸走行情報取得装置を提供する。
【解決手段】第1糸ムラセンサ43は、走行する糸の太さムラを検出して第1糸太さムラ信号を出力する。第2糸ムラセンサ44は、前記第1糸ムラセンサ43から所定の間隔を隔てて配置され、前記糸の太さムラを検出して第2糸太さムラ信号を出力する。類似度評価部65は、下流側フレームと上流側フレームを比較して、前記第1糸太さムラ信号と前記第2糸太さムラ信号との類似度を求める類似度評価処理を、上流側フレームの先頭位置を変化させて複数回行うことで複数の前記類似度を求める。重み付け処理部66は、前記複数の類似度に対して重み付けを行い、複数の重み付き類似度を求める。走行情報取得部67は、前記重み付き類似度に基づいて、前記第1糸太さムラ信号と前記第2糸太さムラ信号との時間的なズレ量を算出するとともに、前記ズレ量に基づいて糸走行情報を取得する。
(もっと読む)
繊維機械のドラフトシステムおよびその運転方法
【課題】きわめて一様なスライバの品質を可能とするドラフトシステム、ならびにその運転方法を提案する。
【解決手段】繊維機械(特には、梳綿機、または、練条機などの紡績準備機械、リング紡績機、空気紡績機、あるいは、フライヤ)のドラフトシステム1であって、引き伸ばすべき材料を案内すべく相互作用する複数の下側ローラおよび上側ローラと、当該ドラフトシステム1の運転中に前記下側、および/または、上側ローラの少なくとも一方に荷重を作用させる少なくとも1つの荷重印加装置16とを備えているドラフトシステム1を運転するための方法であり、荷重の程度が、コントローラ13によって、前記繊維機械の装置データ、および/または、引き伸ばされる材料のデータにもとづいて調節される。
(もっと読む)
綾巻きパッケージ交換装置を運転する方法ならびに綾巻きパッケージ交換装置
【課題】綾巻きパッケージ交換装置を運転する方法であって、綾巻きパッケージ交換装置は、自動で、綾巻きパッケージを製造する繊維機械の作業部に対して機能し、作業部に対して機能するために様々な操作装置、特に旋回可能で移動可能に支承された、ヤーンリザーブを形成するためのヤーン処理エレメントを備えているものを改良して、綾巻きパッケージを製造する繊維機械の作業部の設置位置のずれを問題なく迅速かつ精確に求めるものを提供する。
【解決手段】綾巻きパッケージ交換装置23を、少なくとも綾巻きパッケージを製造する繊維機械1の最初の運転前に、繊維機械1の作業部2に順次位置決めし、測定装置によって、作業部2の設置位置を測定し、求めた値を、作業部2においてヤーン処理エレメント20をあとで精確に位置決めするために準備する。
(もっと読む)
精紡機の管糸径推定装置及び管糸径推定方法
【課題】精紡機における管糸の最大径を推定できるようにする。
【解決手段】紡出されたボビンBの特定のボビン高さで実測された糸部径は、入力装置32によって制御装置25に入力される。制御装置25は、実測された糸部径と当該紡出時のリフティング動作条件とを用いて糸部径基本単位を算出し、算出した糸部径基本単位を当該紡出時の糸種条件と共に登録する。入力装置32により入力された糸種条件に合致する糸種条件が糸部径基本単位と共に前記登録手段に登録されている場合には、制御装置25は、入力された糸種条件に対応する前記糸部径基本単位及び入力された新たなリフティング動作条件を用いて最大管糸径を算出(推定)する。
(もっと読む)
紡績ユニット
【課題】巻取装置による紡績糸の綾振が糸欠点検出装置による欠点部の検出精度に影響を与える恐れがなく、更に、紡績糸に掛かる張力を適度に保つとともに、安定させることによって糸欠点検出装置による欠点部の検出精度を向上させるとした紡績ユニットを提供する。
【解決手段】繊維束Fを牽伸するドラフト装置5と、ドラフト装置5により牽伸された繊維束Fから紡績糸Yを製造する紡績装置6と、紡績装置6により製造された紡績糸Yの張力を安定させる張力安定装置8と、張力安定装置8から送り出された紡績糸Yをパッケージ91へと巻回する巻取装置9と、紡績糸Yの欠点部を検出可能とする糸欠点検出装置7と、を備える紡績ユニット1であって、糸欠点検出装置1は、紡績装置6と張力安定装置8との間に配置するとした。
(もっと読む)
紡績機
【課題】センサとアクチュエータの間の導電接続を省略することによって、信号の伝送をより簡単にすること。
【解決手段】この課題は、紡績機の動作状態を感知し、該動作状態を特徴づける信号を送出する少なくとも1つのセンサ(S)を備える紡績機において、前記センサは(S)は、エネルギーを自給自足するよう構成されていることを特徴とする紡績機によって解決される。
(もっと読む)
まとめられたスライバーを形成するために練条機に組込まれる装置
【課題】スライバーの走行を妨げず、簡単な構造で高い生産速度を可能にすることを目的とする。
【解決手段】供給テーブル、測定素子14及び牽伸機構3を有し、供給テーブルから牽伸機構3に向かってスライバーを供給して牽伸機構を通過させ、測定素子14を供給テーブルと牽伸機構3との間に配置してスライバーの厚さを測定し、測定素子の測定信号に基づいて調整を行ない、牽伸機構の下流側にフリースガイド及びスライバートランペットを配置した、スライバーを加工してまとめられたスライバーを形成するため練条機に組込まれる装置。この装置は、平面図で見て、スライバーが供給テーブルから測定素子を経て少なくとも牽伸機構の出口まで、ほぼ直線的に且つ互いに平行に走行するように構成される。
(もっと読む)
紡機のニューマ装置
【課題】吸引ダクト内の流速や圧力を検出するセンサを設けることなく、ニューマ装置の信頼性を確保した状態でモータ駆動の省エネルギーを達成する。
【解決手段】ニューマ装置は、紡機で発生する風綿や繊維屑を吸引する吸引ダクトが、送風機の駆動により吸引気流を発生するフィルタボックスに接続されている。送風機を駆動するモータ16は、インバータ21から電力を供給されてインバータ21により駆動制御される。制御装置22は、インバータ21の出力電力を計測するとともに、その計測値が目標値となるようにインバータ21に周波数を指示するCPU23を備えている。CPU23はモータ16に供給される電流を検出する電流検出器25の検出信号に基づいてインバータ21の出力電力を演算する。
(もっと読む)
紡機の糸切れ検出装置
【課題】糸継ぎ作業の邪魔にならず、保全作業性の良い紡機の糸切れ検出装置を提供する。
【解決手段】リングプレート11の上面にはトラベラ13を検知する検知部14aを備えたセンサ14がリングプレート11の後側に設けられている。センサ14の検知信号を処理して糸切れの有無を判断するCPU15を備えた制御基板16がリングプレート11の前側に設けられている。センサ14とCPU15とはリングプレート11の下面側に配置されたフレキシブル配線22,27や制御基板16及び信号伝達用基板17上の信号配線を介して電気的に接続されている。制御基板16及び信号伝達用基板17は、リングプレート11の前壁11bに固定されるとともにリングプレート11に沿って延びる収容部24aを備えた支持部材24に支持されている。
(もっと読む)
紡績用の間隙を備える機械、特に、カーディング機械、ドローフレーム、コーミング機械、あるいは、フライヤ用の測定信号を補正するための装置
【課題】同心度誤差を簡便に短時間で検知して補正できる、装置を提供する。
【解決手段】紡績用の間隙を備える機械、特に、カーディング機械、ドローフレーム、コーミング機械、あるいは、フライヤ用の装置で、少なくとも1つの布地繊維スライバーの厚さに関する測定信号を補正する。信号は検知ロールのペアから得られ、2つの検知ロールの1つは固定され、もう一方は力がかけられて固定された検知ロールから離れるように動くことができ、検知ロールのペアの非真円度又は偏心起因の周期的誤差を検知できる。検知ロールのペアは変位センサに接続され、回転角トランスミッターは電気的システムの入力に信号を送る。電気的システムの出力は補正された測定信号を送る。同心度誤差を検知でき簡便に短時間で補正できるように、可動検知ロールにかけられる圧力により、固定検知ロールと可動検地ロールの円周面が接触し、接触時、これらの検知ロールは回転できる。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、ローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に対して一体化される。
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ
【課題】糸欠陥検出器を通過する糸送り量を正確に算出して糸欠陥の検出精度を向上させることができる糸巻取装置を提供する。
【解決手段】巻取ユニット10は、パッケージ30に巻き取られる前の糸20を貯留するための糸プール部71と、糸プール部71に糸20を供給するために駆動されるサーボモータ55と、を備える。また、巻取ユニット10は、糸欠陥を検出するために糸プール部71の上流側に配置されるクリアラ15を備える。そして、巻取ユニット10は、糸プール部71より上流側の糸送り量に基づいて、クリアラ15を通過した太さムラの長さを計算する。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、他方のローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に結合され、且つ、間隔センサ(9、25;47;57、571、572;60)および対応表面(53';59)は、各保持要素(52、52b、53a、53b)の側面であって相互に臨むという側面上に夫々配置される。
(もっと読む)
1 - 20 / 49
[ Back to top ]