
Fターム[5B057AA19]の内容
Fターム[5B057AA19]に分類される特許
261 - 280 / 1,263
画像変換装置
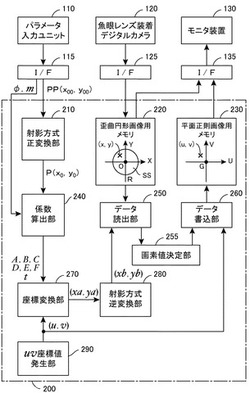
【課題】魚眼レンズで撮影された歪曲円形画像から、任意部分を切り出し、歪みの少ない平面正則画像に変換する演算の負担を軽減する。
【解決手段】歪曲円形画像をメモリ220に格納する。ユーザがユニット110に対して、切出中心点PP、倍率m、平面傾斜角φを指定すると、係数算出部240において回転係数A〜Fが算出される。座標変換部270は、この係数A〜Fを用いた変換式により、メモリ220内の座標(x,y)とメモリ230内の座標(u,v)との相互変換を行い、メモリ230内に平面正則画像を得る。正射影方式以外の魚眼レンズを用いる場合には、変換部210,280による射影方式変換を行って正射影方式の変換式を適用する。座標変換部270における座標変換や、変換部280における射影方式変換を行う際に、開平算・逆数算を含む演算を、予め用意されたテーブルを参照する処理で代用し、演算負担を軽減する。
(もっと読む)
ステレオ画像調整方法、ステレオ画像調整システム、及びステレオ画像調整プログラム

【課題】ステレオ画像を構成する画像間の誤差を倍増させることなく、ステレオ画像の正確性及び安定性を向上させることができるようにする。
【解決手段】カメラ10の主カメラは、ステレオ画像を構成する主画像を撮影する。また、カメラ10の参照カメラは、ステレオ画像を構成する参照画像を撮影する。また、差分画像生成部216は、主画像と参照画像との座標値の差を検出して差分画像を生成する。また、誤差算出部217は、差分画像に基づいて、主画像及び参照画像の座標値の補正値を算出する。そして、部分切出部205は、カメラ中心検出部202が算出したズレ値に基づいて、主画像から部分画像を抽出する。また、部分切出部215は、誤差算出部217が算出した補正値に基づいて、参照画像から部分画像を抽出する。
(もっと読む)
画像表示装置、撮像装置、画像表示システム、画像表示方法および画像合成装置
【課題】目標色を用いた自動追尾処理において、撮像装置側で設定されている目標色の確認を監視者が容易に行えるようにする。
【解決手段】撮像装置から出力された、目標色を用いた追尾処理の結果得られた映像信号と目標色を示す色情報とを入力し、映像信号に基づく画像と色情報に基づく画像とを合成する表示制御手段と、表示制御手段により合成された合成画像を表示する表示手段と、追尾処理における追尾対象物の指示を外部から受け付ける追尾対象指示処理手段とを備えた画像表示装置。
(もっと読む)
画像処理装置、方法及びプログラム
【課題】顔認識において、なりすましを正しく検出可能な画像処理技術を提供する。
【解決手段】取得部51は、撮影された認証対象の画像を時系列に取得して、隣接フレームを抽出する。設定部52は、隣接フレームのそれぞれについて、顔領域と背景領域とを設定する。対応付け部53は、顔領域と背景領域とのそれぞれにおいて、隣接フレーム間の各画素の対応付けを行う。算出部54は、顔領域と背景領域とのそれぞれにおいて、動き特徴量を算出する。判定部55は、顔領域における動き特徴量と背景領域における動き特徴量とを比較して、認証対象が写真であるか人間であるかを判定する。
(もっと読む)
対象物検出装置及びプログラム
【課題】対象物の存在する環境に植物が存在する場合に、対象物の誤検出を低減する。
【解決手段】対象物として歩行者を検出する歩行者検出装置は、周辺環境を撮像して画像を生成するカメラ10と、生成された画像に対して歩行者の候補となる候補領域を設定する候補領域設定部20と、設定された候補領域の周波数分析を行い、周波数分析結果に基づいて、前記設定された候補領域が植物を含む植物領域であるかを判定する植物領域判定部30と、候補領域のうち植物領域と判定されたものを除外した候補領域に対して歩行者があるかを検出する歩行者識別部40と、を備えている。
(もっと読む)
車両の周辺監視装置
【課題】効率的に検出すべき対象物を判定する。
【解決手段】車両に搭載された撮像手段によって得られる撮像画像を用いて車両の周辺を監視する車両周辺監視装置は、検出すべき対象物の所定の種類毎に、該対象物を判定する判定処理が設けられており、車両が走行している位置を検出する手段と、該検出された位置の存在する道路および地域の少なくとも一方に関する特徴を取得する手段と、取得された特徴に基づいて、起動すべき判定処理を選択する選択手段と、撮像画像から抽出された対象物に対し、該選択した判定処理を実行して、該対象物を判定する手段と、を備える。上記特徴は、一実施例では、該位置の存在する道路の種別を表し、他の実施例では、該位置の存在する地域が、所定の条件を満たす街であるか否かを表す。
(もっと読む)
画像処理装置、撮像装置、画像処理方法、およびプログラム
【課題】顔検出の手法(アルゴリズム)に依存することなく、偽顔による誤発報を低減させることができ、その副作用である真の顔の検出率低下を抑制することができる画像処理装置、撮像装置、画像処理方法、およびプログラムを提供する。
【解決手段】撮像装置100は、撮像部110と画像処理装置120を有し、画像処理装置120は、少なくとも顔検出を行い得られた検出情報を出力する検出部121と、検出部の過去の検出情報を保持する保持部123と、検出部の今回の検出情報と保持部に保持された過去の検出情報とから今回検出された顔が偽の顔であるか否かを判定する判定部122と、保持部の内容を更新する更新部124と、判定部の判定結果に応じて今回の検出情報のうち真の顔に係る検出情報だけを出力するフィルタ部125と、を有する。
(もっと読む)
像検出装置及び像検出方法
【課題】広角カメラで得られた画像から所定の被写体像をより早く確実に検出することが可能な像検出装置及び像検出方法を提供する。
【解決手段】像検出装置10は、広角カメラ5により取得した画像21から所定の被写体像を検出するものであって、広角カメラからの画像を入力画像として受けつける入力部11と、互いに直交する第1〜第3の軸を有し第3の軸が広角カメラの光軸に対応する直交座標系での第1の軸又は第2の軸を中心軸とする円柱30の周面30a上に、入力画像を写像することによって円柱面画像32を生成する円柱面画像生成部12Aと、円柱面画像に対して所定の被写体のパターン認識を実行することで所定の被写体像を検出する像検出部13とを備える。円柱面画像を生成して、歪みの影響が低減された円柱面画像上で所定の被写体像の検出を実施していることから、所定の被写体像をより早く確実に検出することが可能である。
(もっと読む)
画像処理装置および方法、並びに、プログラム
【課題】車両の周囲の物体の検出精度を向上させる。
【解決手段】監視部201N乃至201Rの挙動推定部212N乃至212Rは、それぞれ、車両の周囲の異なる方向を撮影した画像を用いて、車両の挙動を表す挙動パラメータを推定する。設定部222は、挙動推定部212N乃至212Rのそれぞれで推定された複数の挙動パラメータに基づいて、車両の周囲の障害物の検出に用いる挙動パラメータを設定する。監視部201N乃至201Rの障害物検出部213N乃至213Rは、それぞれ、車両の周囲の異なる方向を撮影した画像、および、設定された挙動パラメータを用いて、車両の周囲の障害物を検出する。本発明は、例えば、車載用の監視装置に適用できる。
(もっと読む)
人流計測システム
【課題】肌色情報に基づいて人間の顔を検出し、複数の顔を追跡する人流計測システムを提供する。
【解決手段】第1時点における第1の顔情報を記録するステップと、カメラで前記第1時点の直後の第2時点に撮った影像に肌色区域の有無を判断するステップと、前記肌色区域が人間の顔であるかどうかを判断し、人間の顔と判断された場合に、正面顔または横顔かを判断して、判断の結果を仮の顔情報として記録するステップと、前記仮の顔情報と前記第1の顔情報との相似性を一対一に比較し、前記相似性が設定条件に達したら、前記第1の顔情報を前記仮の顔情報に更新され、前記相似性が設定条件に達せず、かつ、前記仮の顔情報が人間の顔と判断されると、前記仮の顔情報を、第2の顔情報として記録して前記第1の顔情報が遮蔽されたと判断するステップと、前記記録された顔によって、通過した人数を計測するステップとを含む。
(もっと読む)
物体識別装置
【課題】本発明は、物体の一部でセンサにより検出できない未検出領域を検出することで、物体の識別精度の向上を図ることができる物体識別装置を提供する。
【解決手段】本発明は、撮像カメラ2及びLRF3により検出された物体Aの特徴量に基づいて物体が識別対象物体であるか否かを判定する物体識別装置1において、物体Aの一部で撮像カメラ2及びLRF3によりにより検出できない未検出領域T4,T6を検出する未検出領域検出部15と、未検出領域検出部15の検出結果に基づいて、物体Aが識別対象物体であるか否かを判定する物体識別部16と、を備える。この物体識別装置1によれば、未検出領域が存在する場合に、この未検出領域を検出して区別することで、未検出領域において検出される特徴量すなわち遮蔽物等の特徴量を該物体の特徴量と誤認識することを回避し、これによって物体の識別精度を向上させることが可能となる。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】顔向きの検出精度をより一段と向上させる。
【解決手段】顔向き検出部51は、カメラ12により撮影された画像から、運転者TSの画像上の顔向きを検出する。特定部位検出部52は、画像上の顔の特定部位の位置(座標)を検出する。記憶部53には、顔の形状に関する知識の情報、例えば、特定部位と基準点の関係を表す頭部モデルが記憶されている。顔基準情報検出部54は、特定部位の座標を用いて、記憶部53に記憶された頭部モデルを画像にあてはめ、そのときの顔基準情報、即ち、顔の基準線または基準点を検出する。補正角度取得部55は、画像上の顔の基準線または基準点の位置から、画像上に写る顔向きの変化量を補正角度として求める。顔向き補正部56は、この補正角度を用いて、顔向きを補正する。本発明は、例えば、監視カメラシステムに適用できる。
(もっと読む)
検出装置、評価装置および方法、並びに、プログラム
【課題】より適切に人の目の状態の検出結果を利用できるようにする。
【解決手段】顔検出部31は、撮像装置11により撮像された画像を用いて人の顔の少なくとも一部の大きさ、形状および位置のうち少なくとも1つを検出する。目状態検出部33は、撮像装置11により撮像された画像を用いて人の目の開閉および形状、並びに、視線方向のうち少なくとも1つを検出する。信頼性評価部22は、顔検出部31による検出結果の変化に基づいて、目状態検出部33による検出結果の信頼性を評価する。本発明は、例えば、運転者の目の状態を検出する装置に適用できる。
(もっと読む)
画像処理システム
【課題】車載ネットワーク上に車載カメラおよび複数の画像認識部が接続された画像処理システムにおいて、画像認識部が画像認識処理をするための前処理を省くことが可能となる技術を提供する。
【解決手段】画像処理システムにおいて、車載ネットワーク上の車載カメラは画素値がRGB表色系で表される画像を撮影する。主成分算出部は撮影したフレーム画像に対して主成分分析を行い、変換行列を求める。画素値変換部は変換行列と各画素のRGB画素値から第1〜第3主成分得点を取得し、少なくとも第1主成分得点を車載ネットワークに配信する。画像認識部はコントラストが強調された第1主成分得点に基づいて画像認識を行い、必要な後続処理を実行する。
(もっと読む)
通話判定装置、その方法、及びプログラム
【課題】撮像対象者の画像情報を解析して、携帯電話の通話中であるか否かを判定する通話判定装置等を提供する。
【解決手段】カメラ120で撮像された撮像情報から操作者101の顔を検出する顔検出部320と、検出した顔の位置に基づいて、携帯電話の通話状態における手の撮像領域を特定する手領域特定部330と、特定された手の領域における画素値の変化量に基づいて、操作者101が携帯電話140の通話中であるか否かを判定する通話判定部340とを備える。
(もっと読む)
侵入者監視システム
【課題】 顔認証のみで不審者を判断でき、更に共連れを検知できる不審者監視システムを提供する。
【解決手段】 監視対象エリアMを撮像するカメラ1と、カメラ1が撮像した映像から人物を認識して追尾する機能を備えた制御機2と、カメラ1の撮像映像を表示し、必要に応じて警報音を発する管理装置3とを備え、制御機2には人物の顔情報を記憶する顔情報記憶部と不審者侵入禁止区域B1に進む特定の行動パターンPT1を含む行動パターンを記憶する行動パターン記憶部を設けた。制御機2は、撮像映像から読み取った人物の顔が顔情報記憶部に登録した顔情報と一致せず、且つ特定の行動パターンPT1の行動軌跡を採ったら不審者侵入と判断する。
(もっと読む)
校正用データ取得装置およびその方法
【課題】 広い領域のステレオ撮影に必要な複数のカメラを設置する際に、容易にキャリブレーションを実行する技術を提供する。
【解決手段】 所定の空間領域(50)に対して異なる方向から撮影する二台のカメラと、その二台のカメラの撮影タイミングを制御する撮影制御装置と、前記所定の空間領域内を移動可能な被写体(たとえばラジコンヘリコプタ31)とを備える。 前記被写体(30)は、三次元の位置座標を取得可能なGPS装置(32)を搭載し、 前記撮影制御装置は、所定の空間領域(50)内の被写体(30)を前記二台のカメラ(11L,11R)にて撮影して画像データを取得する。
(もっと読む)
車両用画像表示装置
【課題】実際の車両よりも大きい描画車両画像を表示する構成でありながら、車両の周囲の壁に車両が当たっていないのに、描画車両画像が壁に当たっているように表示されることを防止する。
【解決手段】車載カメラによって撮影した車両1の周囲の画像を入力し、この入力した画像を、車両1の上方から見た画像である周辺監視画像に変換し、車両1を上方から見た画像であって実際の車両1よりも少し大きく描画した画像である描画車両画像Aを生成し、周辺監視画像と描画車両画像Aを一緒にして表示装置7に表示する画像合成装置6を備え、この画像合成装置6は、描画車両画像Aが車両1の周囲の障害物の画像に当たったときであって、実際の車両1が障害物に当たっていないときには、描画車両画像Aが障害物の画像に当たっていないように表示する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】重み係数の決定を用いることなく精度よく処理対象画像における輝度値のムラを除去する。
【解決手段】行列変換部12は、処理対象画像を当該処理対象画像の各画素の輝度値を要素とする画像行列に変換する。また、平滑化部13は、行列変換部12が変換した画像行列に対して平滑化行列の畳み込み演算を行うことで、処理対象画像を平滑化した平滑化画像の各画素の輝度値を要素とする平滑化画像行列を生成する。次に、除算部16は、画像行列を平滑化画像行列により除算処理した除算処理行列を算出し、画像変換部19が、除算部16が算出した除算処理行列を画像に変換する。
(もっと読む)
全身領域推定装置
【課題】複数の人物が画面上に重なって登場しているシーンでも、各人物の全身領域を正確に分離抽出することができる全身領域推定装置を提供する。
【解決手段】顔特徴検出部12が、入力された画像から人物の顔の特徴を検出し、顔特徴利用全身推定部13が、検出された人物の顔の特徴を用いて全身領域を算出する。また同時に、キャリブレーション情報利用全身推定部15が、検出された人物の顔の特徴及びキャリブレーション部14で算出されたキャリブレーション情報を用いて全身領域を算出する。全身領域出力部16が、顔特徴利用全身推定部13で算出された全身領域及びキャリブレーション情報利用全身推定部15で算出された全身領域に対して重み付けを行って全身領域を決定し、重なり判定部17が、決定された全身領域に基づき異なる人物の顔領域と全身領域との重なり情報から画面上の前後判定を行う。
(もっと読む)
261 - 280 / 1,263
[ Back to top ]