
Fターム[5B057BA08]の内容
Fターム[5B057BA08]に分類される特許
21 - 40 / 190
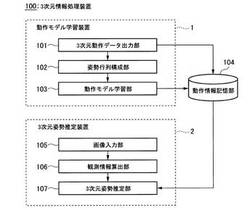
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
画像入力装置、画像表示システム、及び画像入力装置の制御方法

【課題】被写体の一部を非表示にすることを容易に実現することが可能な画像入力装置、画像表示システム、及び画像入力装置の制御方法を提供する。
【解決手段】発光ペン4から赤外光を発光させながら、被写体(資料)上の所望の領域を発光ペン4で囲む領域指定操作を行うことにより、マスクすべき指定領域を設定することができる。そして、設定された指定領域が領域検出部16によって検出されると、制御部14は、画像処理部17に指示をして、指定領域をマスクした画像情報を生成させる。画像処理部17は、制御部14からこの指示を受けると、指定領域を所定の色でマスクして非表示にするためのマスク画像情報を生成する。そして、画像処理部17は、記憶部15に記憶されている撮像画像情報とマスク画像情報とを合成させる処理(マスク処理)を行って新たな画像情報(合成画像情報)を生成し、画像情報出力部18に出力する。
(もっと読む)
画像処理装置および画像処理方法
【課題】赤外線画像上の人物の表面温度と背景の温度とが接近している場合でも、人物を
確実に検出可能とする。
【解決手段】ある注目輝度を含んだ所定の輝度幅の輝度範囲で赤外線画像のコントラスト
を拡大する処理(コントラスト強調)を行い、コントラスト強調後の赤外線画像から人物
検出を行う。そして、ある注目輝度で人物の検出を行ったら、注目輝度を更新し、新たな
注目輝度を含む所定の輝度範囲でコントラスト強調を行い、強調後の画像から人物を検出
する。こうすれば、コントラスト強調によってその人物と背景との輝度差を十分に拡大す
ることができる。従って、人物の表面温度が背景の温度に接近している場合でも、背景か
ら人物を浮かび上がらせることが可能となり、赤外線画像に写った人物を確実に検出する
ことができる。
(もっと読む)
撮像装置
【課題】夜間撮影時などに人物画像を抽出した場合、人物画像のみを不鮮明化することでプライバシーを保護することができる撮像装置を提供する。
【解決手段】演算部44は、画素値毎に赤外成分割合αとクロマChとを判定し、赤外成分割合αが190以上255以下であり、且つクロマが30以上150以下である場合には、人物画像の一部であると判断して、不鮮明化処理を行う。これによりプライバシーが保護される。
(もっと読む)
画像処理装置及びプログラム
【課題】 特殊光画像だけではなく対応する通常光画像をも元に孤立点を判定し、より精度の高い孤立点補正を行う画像処理装置及びプログラム等を提供すること。
【解決手段】 画像処理装置は、白色光の波長帯域の情報を有する被写体像を含む通常光画像を取得する通常光画像取得部104と、特定の波長帯域の情報を有する被写体像を含む特殊光画像を取得する特殊光画像取得部105と、通常光画像内の処理対象画素である通常光処理対象画素の画素値と、通常光処理対象画素の周辺に位置する通常光周辺画素の画素値とに基づいて、通常光処理対象画素の孤立点判定処理を行う孤立点判定処理部107と、孤立点判定処理部107による孤立点判定処理に基づいて、特殊光画像に施す補正処理を制御する補正制御部108と、を含む。
(もっと読む)
画像処理装置
【課題】本発明では、入射光量の少ない暗い領域であっても被写体となる対象物を逃すことなく検出することができる画像処理装置の提供を目的とする。
【解決手段】遠赤外線カメラは撮像領域内に存在し遠赤外線を放射する熱を持った物体を検出するためガラスに反射した映り込み光を画像として撮像することはないという性質を利用し、遠赤外線カメラから取得した遠赤外線画像と可視光カメラから取得した可視光画像を比較し、比較結果に基づいて映り込み部分の補正を行う。
(もっと読む)
人検出方法
【課題】従来技術にともなう問題の少なくとも緩和または解決を目的とする。
【解決手段】人の検出を含む方法を開示する。例えば、実施形態では、画像センサから、検出空間の画像(例えば、熱画像、赤外線画像、可視光画像、3次元画像)を受け取る。実施形態では、この1つ以上の画像に基づき、検出空間に人がいることを検出する。また、実施形態では、検出した人の1つ以上の特徴を決定する。特徴の例としては、1つ以上のデモグラフィックカテゴリへの所属及び/またはその人の動作などを含むが、これらに限定されない。さらに、実施形態では、こうした人検出と特徴決定に基づき、出力装置へのコンテンツの配信を制御する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】霞などで見えにくい撮影条件や、照度の低い暗い環境でも被写体を撮像可能で、カラー画像を得ることが可能な画像処理装置、画像処理方法及びプログラムを提供する。
【解決手段】可視光領域の波長成分のみからなるカラー画像データと、可視光領域の波長成分を含まず可視光領域以外の波長成分のみからなるモノクロ画像データとを取得する画像取得部と、カラー画像データから色情報を抽出する色情報抽出部と、モノクロ画像データから輝度情報を抽出する輝度情報抽出部と、抽出された色情報と輝度情報とを合成し合成画像データを生成する合成部とを備える。
(もっと読む)
画像処理システムおよび画像処理プログラム
【課題】 短い処理時間で確実に歩行者の存在を検知する。
【解決手段】 第1判定処理部34は、遠赤外線カメラ11により撮影された、撮影対象物の温度に基づく各画素のデータ値を含む画像データに基づく4値化された画像データから抽出された歩行者候補領域において、画素のデータ値を参照して、データ値ごとにその度数の割合を示すヒストグラムを生成し、前記値ごとの度数の割合に基づいて、前記歩行者候補領域が歩行者に該当するかを判断する。第2判定処理部35は、さらに、歩行者候補領域について、その外縁を取り囲む外枠領域を生成し、かつ、当該外枠領域を複数のブロックに分割し、ブロックごとの、当該ブロックに含まれる歩行者候補領域の画素のデータ値に基づき、前記横方向のブロックにおけるデータ値の変化を示す指標値と、前記縦方向のブロックにおけるデータ値の変化を示す指標値とに基づいて、歩行者候補領域が歩行者に該当するかを判断する。
(もっと読む)
車両の周辺監視装置
【課題】車両周辺の移動物体の検出精度を向上させた車両の周辺監視装置を提供する。
【解決手段】車両の周辺の物体の位置および速度ベクトルを検出する物体検出手段と、車両の周辺の画像を取得する撮像手段と、撮像手段により取得されたグレースケール画像を多値化する多値化手段と、物体位置検出手段が特定した物体の位置に対応する取得されたグレースケール画像に、当該物体の位置の各々に対応する所定サイズの領域を設定する領域設定手段と、領域毎に、対応する物体の速度ベクトルの大きさに応じて、対応するグレースケール画像を多値化する際のしきい値を設定する多値化しきい値設定手段と、多値化手段により対応する多値化しきい値を用いて多値化された画像に基づいて、所定の対象物の有無を判定する判定手段と、を備える。
(もっと読む)
監視装置、監視方法
【課題】人以外を人と誤検知することを低減し、人の検知精度を向上させた監視装置及び監視方法を提供すること。
【解決手段】空間環境の変化を検出するセンサ21と、前記センサの信号から前記空間環境を変化させた各検知対象物の推定度を算出する検知対象推定手段23と、を有する空間の監視装置100であって、人以外の前記検知対象物に対応づけて、重み付け情報を記憶した重み付け情報記憶手段27と、前記検知対象推定手段23が推定した前記検知対象物に対応づけられた前記重み付け情報により、各検知対象物の前記推定度を重み付けして、前記空間環境を変化させた前記検知対象物を特定する検知対象物特定手段25と、を有することを特徴とする。
(もっと読む)
画像処理装置、及び画像処理プログラム
【課題】2時刻法により被撮像物の変状部分の位置を検出する確率が高い画像処理装置を提供する。
【解決手段】第1撮像時間帯に被撮像物を撮像して得られた複数の画像フレームからなる第1温度画像データと、第2撮像時間帯に被撮像物を撮像して得られた複数の画像フレームからなる第2温度画像データと、第1温度画像データ及び第2画像データの各画像フレームを撮像した位置の情報とを用いて、第1温度画像データと第2温度画像データと位置の情報とに基づき、各第1温度画像データの画像フレームとそれに一部重複する第2温度画像データの画像フレームとを対応付ける。また、対応付けられた第1温度画像データの各画像フレームの温度値のピークの位置と、対応付けられた第2温度画像データの各画像フレームの温度値のピークの位置とを検出するとともに、温度値のピークが被撮像物の座標上で一致する場合に、一致したピークの位置を変状位置として検出する。
(もっと読む)
車両周辺監視装置
【課題】グレースケール画像に対して微分フィルタによるフィルタ処理を実施してから、2値画像を生成したときに、対象物の画像の欠損が生じることを抑制した車両周辺監視装置を提供する。
【解決手段】レーザーレーダー8により検出された物体と車両との相対位置に基づいて、微分フィルタによるフィルタ処理が実施されたフィルタ処理後画像Im2内に、該物体の実空間における位置及び大きさに対応した位置及び大きさの処理対象領域を設定する処理対象領域設定部15と、フィルタ処理後画像Im2に対して、前記処理対象領域を、前記処理対象領域の設定対象となった物体と前記車両との距離が短いほど低い輝度値に設定された2値化閾値により2値化する処理を行って、2値画像を生成する2値画像生成部14とを備える。
(もっと読む)
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口および第3の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第2の画像データ内の変位情報に基づいて、好ましくは前記第2の画像データに関連する高周波画像データの自己相関関数内の変位情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。  (もっと読む)
(もっと読む)
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第1の画像データの少なくとも1つの領域内の第1のシャープネス情報および前記第2の画像データの少なくとも1つの領域内の第2のシャープネス情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。 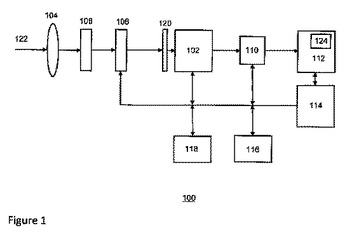 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】微分フィルタによるフィルタ処理を行った場合に生じ得る弊害を抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラ1により撮像された原画像Im1に対して、微分フィルタによるフィルタ処理を施するフィルタ処理部13と、外気温Tsが温度範囲Tw内であるとき及び原画像Im1の輝度分散Lvが閾値Lv_th以下であるときは、原画像Im1に対してフィルタ処理部13によりフィルタ処理を実施して、フィルタ処理後画像Im2から歩行者の画像を検知し、外気温Tsが温度範囲Twから外れ且つ原画像Im1の輝度分散Lvが閾値Lv_thを超えているときには、フィルタ処理を禁止して原画像Im1から歩行者の画像を検知する対象物検知部14とを備える。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】2次元データの3次元復元を好適に行う画像処理装置、画像処理方法、および、プログラムを提供する。
【解決手段】デジタルカメラ1は、通常の可視光画像を撮影するための可視光カメラ部21に加え、遠赤外線画像を撮影するための遠赤外線カメラ部24を備える。可視光画像を小領域に分解し、各領域の特徴量を推定する。また、遠赤外線画像に基づき、人物や動物がいる領域を特定する。これらの情報に基づき、各領域の3次元情報を求め、3次元情報を持つ画像データを生成する。
(もっと読む)
画像表示システム及び画像表示方法
【課題】可視画像に利用可能な光源を用いて可視画像と不可視画像とを表示可能な画像表示システム及び画像表示方法を得る。
【解決手段】第1の領域41の明度は、第3の領域43の明度と異なるため、裸眼で第1の画像50を観察するユーザは、第1の領域41と第3の領域43との境界を認識する。第2の領域42の三刺激値の値は、第3の領域43の輝度から求められる三刺激値と同じである。これをユーザが観察すると、第1の領域41が明るく見え、第2の領域42と第3の領域43が同じ明るさであって第1の領域41よりも暗く認識する。ユーザがデジタルカメラ30を用いて第1の画像50を撮影すると、撮影フィルタ33を透過した被写体像においては、第1の領域41が最も明るく、その次に第2の領域42が明るく、第3の領域43が最も暗い。
(もっと読む)
モデル入力装置およびモデル生成システム
【課題】高精度に対象物の動立体モデル(三次元動画像データ)を取得することができるモデル入力装置およびモデル生成システムを提供する。
【解決手段】モデル入力装置は、対象物の色彩データを取得する撮影部10cと、可視光以外の波長を有する光を前記対象物へ照射する照射部10aと、前記対象物で反射された前記光を受光する受光部10bと、内部に前記撮影部と前記照射部と前記受光部とを備えるユニット10と、前記撮影部で得られた前記色彩データと前記受光部で得られた反射光に関する情報とをコンピュータへ出力可能なインターフェースと、を備える。
(もっと読む)
対象推定装置
【課題】赤外画像の背景にノイズを含む状態で微小目標の位置を精度良く検出・追跡することのできる対象推定装置を得る。
【解決手段】画像撮影手段1は、撮影対象を含む複数帯域の赤外画像を取得し、赤外画像は帯域毎に画像蓄積手段2に記憶される。背景ノイズ除去手段3は、これらの赤外画像に対して実験データに基づいた係数で線形演算を行い、背景ノイズを除去する。サブピクセル処理手段4は、背景ノイズ除去手段3で背景ノイズが除去された画像を用いて1画素以下の対象位置を検出する。対象追跡手段5は、サブピクセル処理手段4により検出された対象位置を追跡し、次時刻の位置を推定する。
(もっと読む)
21 - 40 / 190
[ Back to top ]