
Fターム[5B057BA17]の内容
Fターム[5B057BA17]に分類される特許
81 - 100 / 353
撮像装置及び撮像方法
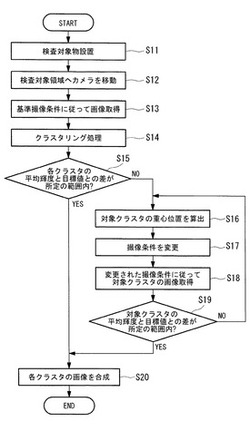
【課題】欠陥検出に適した画像を取得することを目的とする。
【解決手段】被検査物の検査対象領域に照明光を照射し、検査対象領域の基準画像を基準となる基準撮像条件に従って取得し、基準画像をクラスタリング処理して複数のクラスタに分割し、各クラスタが所定の条件に合致するかを判定し、各クラスタが所定の条件に合致しない場合に、所定の条件に合致しないクラスタの撮像条件を変更し、所定の条件に合致しないクラスタの画像を変更された撮像条件に従って取得し、全てのクラスタが所定の条件に合致するまで撮像条件の変更及びクラスタの画像の取得を繰り返し、全てのクラスタが所定の条件に合致すると判定された場合に、所定の条件に合致した各クラスタの画像を合成して検査対象領域の合成画像を取得する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム

【課題】テンプレートマッチングによる対応点探索を行なうステレオマッチング手法において、隠れ領域が存在する場合でも簡易な処理で精度の高いマッチングを行なう。
【解決手段】境界画素指定部21は、被写体の影響によって第1の画像および第2の画像のいずれかにおいて写っていない領域である隠れ領域といずれにも写っている領域である非隠れ領域との境界に対応する1または複数の画素である境界画素を第1の画像および第2の画像においてそれぞれ指定する。相関計算範囲決定部22は、第1の画像および第2の画像における各境界画素に基づいて相関計算範囲を決定する。相関計算部13は、第1の画像における複数のブロック画像と第2の画像における複数のブロック画像との間のすべてまたは一部の組み合わせごとに、相関計算範囲に従って画素値の相関係数を算出する。
(もっと読む)
欠陥レビュー装置
【課題】複数台の画像処理装置を用いて欠陥レビューないし欠陥分類を実行する欠陥レビュー装置において、1台の画像処理装置が故障しても欠陥レビューを継続可能な欠陥レビュー装置を実現する。
【解決手段】複数台の画像処理装置間を統括制御する画像処理制御部を設け、複数台の画像処理装置間で常に生存信号を送受信する。生存信号に何らかの障害が検出された場合(タイムアウトなど)、複数台の画像処理装置間で実行している画像処理について、画像処理制御部が画像処理を実行する画像処理装置の再割り当てを行う。
【効果】障害が発生しても欠陥レビュー装置の動作を継続させることができる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】画像の傾き角度、仰角あおり角度および画角の補正を行う際に、ユーザがより直感的な操作で補正機能の選択と設定を容易に行えるようにする。
【解決手段】画像処理装置では、取得手段が画像の画像データから撮影時の水準器情報を取得し、補正画面制御手段が水準器情報に基づいて画像の傾き角度と仰角あおり角度の一方又は両方の補正処理を一意の順序で実行するための操作画面を表示装置に表示し、画像処理手段が、操作者による操作画面にしたがう操作に応じて傾き角度と仰角あおり角度の一方又は両方の補正処理を実行し、画像表示手段が、操作者による操作画面にしたがう操作に応じて補正される画像を操作に対応させて表示装置に表示し、画像生成手段が、補正ステップが完了した後の画像を新たな画像として生成し、画像保存手段が、新しい画像を保存する。
(もっと読む)
車載撮像装置
【課題】撮像手段を車両に搭載した状態のまま、撮像手段の設定を簡単に且つ正確に確認、変更することができる車載撮像装置を提供することを目的とする。
【解決手段】車両に搭載される撮像手段2と、撮像手段2の出力画像信号の処理を行う処理手段15と、車両の機器制御装置からデータ伝送路を介して車両本体の情報を受信する通信手段10とを有し、処理手段15は、撮像手2段の現在の設定が、通信手段10で受信した車両本体の情報に対応しているか否かを判断する車載撮像装置を提供する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】広角歪を低減することが可能な画像処理装置を提供する。
【解決手段】画像処理装置は、画像処理によって撮影された被写体の画像の歪曲収差を補正する歪曲補正部3aと、軸外の位置に前記被写体Vの顔がある場合に前記軸外の位置に対して歪曲補正部が与える歪曲収差の補正量を前記軸外の位置に被写体の顔がない場合の歪曲補正部による歪曲収差の補正量よりも小さくする補正量低減部6aと、を有する。
(もっと読む)
移動体位置推定装置及び移動体位置推定方法
【課題】ロボットの位置を高精度に推定する。
【解決手段】パーティクルフィルタ処理部28が、ランダムに複数のサンプルを設定するサンプル事前設定部72と、設定されたサンプルをカメラ18にて取得されたターゲットの画像に基づいて評価するサンプル評価部74と、当該評価結果に基づいて複数のサンプルを再設定するリサンプリング部76と、サンプルの再設定後に、外部モデルに基づいてサンプルの修正処理を行う第1修正部78と、移動量検出部22の計測結果に基づいて、第1修正部78による修正処理後のサンプルを更に修正する第2修正部80と、を有しているので、移動量検出部に計測誤差がある場合であってもロボットの移動中に実測結果に基づいてサンプルの修正処理を適宜行うことで、ロボットの位置を高精度に推定することができる。
(もっと読む)
光学式検出装置および電子機器
【課題】複雑な画像信号処理回路なしに簡単な構成で手などの人の動きを容易に検出できる小型で安価な光学式検出装置を提供する。
【解決手段】エリアセンサである発光素子2と、発光素子2から出射された光束を測定対象物20に照射する発光レンズ部4aと、測定対象物20からの反射光を集光する受光レンズ部5aと、受光レンズ部5aにより集光された測定対象物20からの反射光を検出する受光素子3と、受光素子3からの受光信号を処理する信号処理部7とを備える。上記信号処理部7は、受光素子3からの受光信号に基づいて、受光素子3上の光スポット位置または光スポット形状の少なくとも一方からxy座標平面上の測定対象物20のx座標またはy座標の少なくとも一方を検出する。
(もっと読む)
移動軌跡図作成装置およびコンピュータプログラム
【課題】 ハイエンドなハードウェアを採用せずとも、人為的条件に左右されにくい、これまでよりも客観的なデータ取得を実現可能な飛翔体軌跡算出の技術を提供する。
【解決手段】 前記複数箇所のそれぞれの撮影手段にて飛翔体を撮影した画像データおよびその画像データを取得した時刻データを記録する画像データ記録手段と、それぞれの画像データおよび時刻データを入力するデータ入力手段と、その時刻データを用いて画像データを同期させるデータ同期手段と、そのデータ同期手段にて同期された画像データから飛翔体が三次元空間を移動する軌跡を含む解析データを算出する3D算出手段と、その3D算出手段が算出した解析データを出力する解析データ出力手段と、を備えた飛翔体軌跡算出装置を提供する。
(もっと読む)
画像処理方法および画像処理装置
【課題】 照明などの明るさによって合焦度が変動することを考慮して合焦度判定を行うことができる画像処理方法および画像処理装置を提供する。
【解決手段】 読取対象表示およびその周辺の背景を含む判定対象領域内の各画素を二次微分して二次微分画像を生成する二次微分画像生成工程と、二次微分画像内の各画素の二次微分値の絶対値を相加平均して、絶対平均値を算出する絶対平均値算出工程と、判定対象領域の濃度ヒストグラムを生成する濃度ヒストグラム生成工程と、濃度ヒストグラムを高輝度側と低輝度側のクラスに分けるための閾値を算出し、該閾値によって分けられた2つのクラスの各平均濃度の差分によって、濃度分布幅を算出する濃度分布幅算出工程と、絶対平均値を濃度分布幅で除して、合焦度を算出するパラメータ算出工程と、算出された合焦度と所定の閾値とを比較するパラメータ判定工程とを含む。
(もっと読む)
車両周辺監視装置
【課題】人体等の生体(哺乳動物)の温度に近いコンクリート等の壁等が電柱等により遮られた場合に発生する非生体(前記コンクリート等の壁)を生体と誤検知してしまうことを防止する車両周辺監視装置を提供する。
【解決手段】探索マスク領域101内に含まれる生体候補の形状の時間変化が所定以下であるとみなしたとき、生体候補を生体として認識するようにしたので、人体等の生体(哺乳動物)の温度に近いコンクリート等の壁等が電柱等により遮られた場合に遮られなかった人体サイズに近似する領域を生体と誤検知してしまうという不都合を防止できる。電柱等のオクルージョン物体に遮られた壁等で遮られなかった領域は、画像上、実空間上の形状が時間変化するのに対して、人体等の生体は、時間変化がないという知見も基づき誤検知を防止する。
(もっと読む)
ナンバプレート読取装置およびナンバプレート読取方法
【課題】文字画像の解像度不足や文字が不鮮明であっても、その影響を低減してナンバプレート読取精度の向上が図れるナンバプレート読取装置を提供する。
【解決手段】車両が検知されると、撮像手段から得られるフレーム画像からナンバプレート内の解像度の高い文字のみを認識し、車両速度検出手段により検出された車両速度に基づき、車両が検知されてから当該車両のナンバプレートと撮像手段との距離が当該ナンバプレート内の解像度の低い文字を読取るのに最適となる距離になるまで当該車両が移動する時間を推定し、この推定された時間経過時、その前後フレーム近傍の複数フレームの画像を撮像手段から得られるフレーム画像から抽出し、この抽出された複数のフレーム画像を用いて当該ナンバプレート内の解像度の低い文字画像に対して高精細化処理を行ない、この高精細化された解像度の低い文字画像に対してのみ認識処理を行ない、この解像度の低い文字に対する認識結果と上記解像度の高い文字に対する認識結果とを統合する。
(もっと読む)
車両周辺画像提供装置
【課題】トップビュー画像生成の際に白飛びを避けるように画像を生成して車両周囲の表示をすることが可能な「車両周辺画像提供装置」を提供すること。
【解決手段】車両周辺画像提供装置は、表示手段と、車両周辺の画像を取得可能に設置された複数のカメラと、車両の画像のデータを予め格納すると共に、カメラにより取得された画像のデータを逐次格納する記憶手段と、記憶手段に格納されているデータから車両の画像と車両周辺の画像を合成して表示手段の画面に表示させるように制御する制御手段と、を備える。制御手段は、各カメラにより取得された画像間の境界領域となるつなぎ目の付近の所定数の画素を抽出して輝度値を算出し、輝度値が白飛びを規定する所定の値以上のときに、白飛びの発生しない位置につなぎ目を変更して新たなつなぎ目とするつなぎ目調整処理を行い、車両周辺の画像を合成する。
(もっと読む)
三次元細胞画像解析装置
【課題】細胞質、細胞核あるいは、細胞小器官などが存在する解析対象領域の特定を、データ量を極力少なくして、高速に、実現することが可能な三次元細胞画像解析装置を提供する。
【解決手段】試料の合焦位置がZ方向に所定ピッチで連続的に異なった状態でZ方向に順に蓄積された、複数の二次元の細胞画像の集合体からなる三次元の細胞画像を解析する、コンピュータを備えた三次元細胞画像解析装置であって、前記コンピュータを、三次元の細胞画像に対して、細胞自体あるいは、核、小器官など種類の異なる夫々の細胞器官の領域の所定の位置情報を検出する位置情報検出手段2a、該三次元の細胞画像に対して、位置情報検出手段2aが検出した夫々の細胞器官の領域の所定の位置情報を用いて、三次元の細胞器官の領域を構築する三次元領域構築手段2b、として機能させる画像解析ソフトウェアを有する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】ユーザーが手動でズーム動作を行って撮影する際に、滑らかなズーム変化を有する動画像を生成することが可能な画像処理装置及び画像処理方法を提供する。
【解決手段】被写体像を拡大したり縮小したりするズームレンズがユーザーの手動操作によって使用されて撮影された複数枚の画像と、複数枚の画像に対応した撮影時の焦点距離とを記録する記録部と、記録された焦点距離に基づいて、焦点距離の時間変化が滑らかになるようにスムーズ化用焦点距離を算出する焦点距離算出部と、スムーズ化用焦点距離と、記録された焦点距離と、記録された画像とに基づいて、スムーズ化用焦点距離に対応する画角を有するスムーズ化用画像を生成する画像生成部とを備えることを特徴とする。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】被検体を撮影する際に自動的に焦点を合せ、得られた画像から欠陥の有無を判断する欠陥検査方法及び欠陥検査装置を提供する。
【解決手段】撮影して得られた画像から欠陥の有無を判断する欠陥検査方法において、撮像手段2の焦点を合せる自動焦点調節ステップと、被検体における欠陥の有無を判断する画像解析ステップとを具備し、自動焦点調節ステップは、被検体と撮像手段2との距離又は撮像手段2の焦点距離を複数回変更して撮影し、得られた各画像から被検体の輪郭を抽出処理し、各輪郭抽出画像に対して離散フーリエ変換処理を用いることで周波数領域に変換し、周波数領域における輝度値の総和を算出し、輝度値の総和が最大となる被検体と撮像手段2との距離又は撮像手段2の焦点距離を特定し、特定された被検体と撮像手段2との距離又は撮像手段2の焦点距離に調節する、とした。
(もっと読む)
受精卵観察の画像処理方法、画像処理プログラム及び画像処理装置
【課題】受精卵を高速且つ頑健に検出することを可能にした画像処理手段を提供する。
【解決手段】撮像装置により低倍観察視野内に位置する物体を撮影した低倍画像を取得するステップS1と、低倍画像に写し込まれた複数の物体を抽出するステップS3,4と、低倍画像中に含まれる複数の物体ごとに、受精卵の属性に応じた低倍画像の特徴量を算出し、低倍画像の特徴量に基き受精卵候補を抽出するステップS6と、低倍観察視野内の領域を高倍観察視野の大きさに応じた複数の小領域に区分けし、受精卵候補に選別された物体が含まれる小領域についてのみ、順次撮影を行って高倍画像を複数取得するステップS7,8と、複数の高倍画像中に含まれる受精卵候補の物体ごとに、受精卵の属性に応じた高倍画像の特徴量を算出し、高倍画像の特徴量に基き受精卵候補の物体の中から受精卵を識別するステップS9と、物体に対する識別結果を出力するステップS10とを有する。
(もっと読む)
街路環境内の3Dモデルを評価するための方法及び装置
【課題】 立体センサ技術を使用して街路環境内の3D−モデルを評価するための方法を提供する。
【解決手段】 この方法では、含まれたセンサは対で配置されている。本発明はまた、立体センサ技術を使用して街路環境内の3D−モデルを評価するための装置に関し、それはブラケット(33)上に取り付けられた少なくとも一対のセンサ(16,17,18)を含み、センサの各対は共通面内に位置されている。本発明は、困難なコントラスト条件下の立体効果を測定する問題を解決する。また、本発明によれば、含まれた各対のセンサが、画像面内のコントラストの低レベルが避けられるようにコントラスト情報に基づいて位置される方法が提案される。含まれた対のセンサ(16,17,18)が、センサ対(16,17,18)のセンサ(16a,16b,17a,17b,18a,18b)が互いから離れて水平に位置され、センサの一方がブラケット(33)の水平面の上に、他方が水平面(22)の下に位置されるようにブラケット(33)の本質的に水平な面(22)に対して相互に位置されることを含む装置が提案される。
(もっと読む)
画像検査装置、画像検査方法およびプログラム
【課題】少ない数の入力画像により高精度に画像検査を行うことができ、かつデータ処理の負担を低減することのできる画像検査装置を提供する。
【解決手段】基準空間の算出に利用する基準画像を複数の分割基準画像に分割する第1分割部104と、分割基準画像それぞれのマハラノビス距離に基づいて、画像検査の対象となる被検査画像の良否判定に利用する閾値を決定する閾値決定部110と、被検査画像を、複数の分割被検査画像に分割する第2分割部124と、分割被検査画像それぞれのマハラノビス距離に基づいて、代表値を決定する代表値決定部128と、代表値が閾値よりも大きい場合に、被検査画像に異常があると判定する良否判定部130とを備えた。
(もっと読む)
カメラ校正装置、カメラ校正方法、カメラ校正プログラムおよびプログラムを記録した記録媒体
【課題】撮影作業コストを低減させるともに、簡単な作業で、カメラと参照物体が離れた場合でも高精度にカメラ校正を行う。
【解決手段】撮像装置5から取得した画像から、その撮像装置5の内部パラメータと姿勢および位置を含む外部パラメータを校正するカメラ校正装置1であって、前記画像から参照物体3の直線状に並んだ参照点の画像座標を検出する参照点検出手段4と、光軸回転角に応じて画像を画像座標の原点を中心に逆回転し、かつ、参照物体3の位置を移動させる参照物体制御手段6と、計測装置10により撮像装置5と計測装置10間の仰角Ψと距離Lを計測する幾何計測手段7と、参照点A,B,Oと撮像装置5間の射影的幾何の関係を利用して、前記撮像装置5と計測装置10間の仰角と距離L,光軸回転角Ψ,および参照物体制御後に検出した参照点の画像座標から、撮像装置5の内部パラメータと外部パラメータを校正するカメラ校正手段8と、を備える。
(もっと読む)
81 - 100 / 353
[ Back to top ]