
Fターム[5B057BA17]の内容
Fターム[5B057BA17]に分類される特許
21 - 40 / 353
画像処理装置および画像表示システム
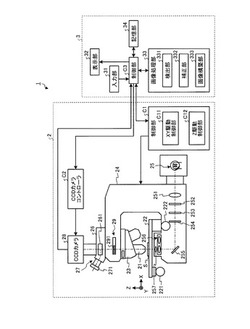
【課題】標本の高さ方向が異なる画像において、高さ方向に垂直な平面間の撮像領域のずれを補正して、高精度の全焦点画像および3次元画像を構築することができる画像処理装置および画像表示システムを提供すること。
【解決手段】固定された軸に沿って移動しながら撮像された一群の画像をもとに全焦点画像および/または3次元画像の構築処理を行う画像処理部33であって、一群の画像において、各画像における軸に垂直な平面内のずれの検出を行なう検出部331と、検出部331の検出結果に応じてずれの補正を行う補正部332と、固定された軸に沿って移動して撮像された画像および/または補正部332で補正された画像を含む一群の画像をもとに、全焦点画像および/または3次元画像を構築する画像構築部333と、を備えた。
(もっと読む)
車両周囲画像撮像システム

【課題】車両周囲画像撮像システムにおいて、高性能な演算処理装置を必要とせず、かつ適正に周囲画像を補正する。
【解決手段】カメラ傾斜角センサ20(第1の検出器)によって検出されたカメラ10の傾き角度αiと車両傾斜角センサ40(第2の検出器)によって検出された車両200の傾き角度βとの差γi(傾き角度差分値)が、予め設定された基準値Γi(初期値や設計値等)から変化したときは、その変化量Δγi(ずれ量)に応じて俯瞰画像(周囲画像)の補正を行うものであり、差γiを算出する演算処理は軽負荷であるため高性能な演算処理装置を必要とせず、また、カメラ10の傾き角度αiの変化のみに応じて俯瞰画像の補正を行うのではなく、車両200の傾き角度βとの相対的な関係γiの変化に応じて補正を行うため、適正に俯瞰画像を補正する。
(もっと読む)
画像処理による渡り線測定装置
【課題】渡り線と背景の切り分けを高精度に行うことが可能な画像処理による渡り線測定装置を提供する。
【解決手段】車両の屋根上に設置されたラインセンサカメラ2と、車両の内部に設置された計測用コンピュータ3とを備えた画像処理による渡り線測定装置において、計測用コンピュータ3が、ラインセンサ画像作成部3aと、標準偏差背景除去処理部3bと、判別分析二値化処理部3cと、ノイズ除去処理部3dと、渡り線部エッジ検出部3eと、渡り線部高さ計算部3fと、渡り線部偏位計算部3gとを備えるようにし、ラインセンサ画像に対して標準偏差背景除去処理を行ったうえで二値化処理を行うことにより渡り線と背景との切り分けを行うようにした。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
対象物把持装置、対象物把持装置の制御方法、およびプログラム
【課題】対象物の姿勢を推定して把持を行う処理を高速化すると共に、把持動作の失敗確率を低減する。
【解決手段】対象物の姿勢を姿勢推定パラメータに基づいて推定する推定部と、推定部により推定された対象物の姿勢に基づいて対象物を把持する把持部と、把持部による把持の失敗を検知する検知部と、検知部により把持の失敗が検知された際の対象物の姿勢に基づいて姿勢推定パラメータを修正する修正部と、を備える。
(もっと読む)
撮像装置
【課題】距離情報を用いた画像処理の結果を短時間で取得する。
【解決手段】撮像装置は、共通の被写体の撮影を行う2つの撮像部を備える。メイン撮像部における撮影構図の確定後、サブ撮像部においてフォーカスレンズの位置を所定量ずつずらしながら高フレームレートにて連続撮影を行うことで焦点位置の異なる複数のサブ画像を取得し、複数のサブ画像の画像信号に基づき各被写体の被写体距離を表す距離情報を生成する。距離情報の生成後又は距離情報の生成と並行して、メイン撮像部においてパンフォーカスを用い、メイン画像を撮影する。画像処理部は、距離情報を用いてメイン画像の合焦状態を調整することにより目標結果画像を生成する。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
画像処理装置及び画像処理方法
【課題】ラインセンサの読み取り時に発生する位置ずれを主走査及び副走査のどちらの方向に対しても補正する画像処理装置及び画像処理方法を提供すること。
【解決手段】実施形態の画像処理装置は、カラー用の複数のラインセンサから構成されるラインセンサ部と、前記複数のラインセンサで読み取られたカラー信号毎に画素単位で保存する画像メモリ部と、前記画像メモリ部に保存されるカラー信号毎の画素を用いて、画像処理対象とする注目画素とその周辺画素を含む画素配列を画像処理単位として生成する画素配列生成部と、前記画素配列から基準色となる基準画素配列を生成する基準色算出部と、基準画素配列を構成する画素の画素値と前記画素配列を構成する画素の画素値から前記カラー信号毎の回帰直線を算出する回帰直線算出部と、前記回帰直線を用いて前記注目画素の画素値を補正した補正画素配列を前記カラー信号毎に生成する色ずれ補正部と、前記補正画素配列と前記画素配列とを所定の混合率で混合する補正信号混合部と、を有する。
(もっと読む)
撮像装置及び撮像方法
【課題】複数の撮像部を有し、各撮像部がそれぞれ撮影を行うことで、異なる複数視点からの撮影画像を取得し、各撮影画像を合成することで、撮影時に設定したフォーカス距離とは異なるフォーカス距離の画像を生成できるようになっている多眼カメラにおいて、重要被写体がある距離を合成フォーカス距離とした場合の超解像可能性を上げる。
【解決手段】異なる複数視点からの撮影を行う複数の撮像手段と、前記撮像手段により撮像された画像から重要被写体を抽出する抽出手段と、前記抽出された重要被写体に対する超解像可能性を算出する算出手段と、前記算出された超解像可能性に応じて、撮像パラメータを調整する調整手段とを備える。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法
【課題】 従来の2次元画像と距離画像を併用した場合の位置姿勢計測手法に比べて、複雑背景下であっても高速かつロバストに位置姿勢を計測すること。
【解決手段】 2次元画像対応探索部140は、撮像画像中における仮想物体の幾何特徴と、撮像画像中に映っている現実物体において該幾何特徴に対応する特徴部分と、の対応付けを行う。対応探索領域設定部150は、仮想物体を構成するそれぞれの図形を距離画像上に投影し、該投影された図形の領域から、特徴部分に対応する距離画像内の部分の周辺を省いた残りの領域を、対応探索領域として設定する。位置姿勢算出部170は対応探索領域内の画素の奥行き値が示す位置と該画素に対応する仮想物体上の位置との3次元空間における距離、幾何特徴と特徴部分との3次元空間における距離、を表す評価関数を最小化するように位置姿勢情報を繰り返し更新する。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
プリント検査装置、プリンタシステム
【課題】プリント品質検査に際して検査用キャラクタの読み取りが確実に行えるようにする。
【解決手段】プリンタ10のプリントデータ生成部11は描画データからプリント制御のためのプリントデータを生成して検査装置20に転送する。検査装置20のビットマップ生成・展開部21は、転送されたプリントデータをビットマップデータに変換してメモリに展開する。そして、検査装置20のキャラクタ読取部22は、展開されたビットマップデータから検査用キャラクタを読み取る処理を行う。展開されたビットマップデータは用紙にプリントされたものと同じイメージ内容を有しているため、ビットマップデータから検査用キャラクタを読み取ることは、プリント後の用紙を撮像したイメージから検査用キャラクタを読み取ることに相当する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
認識対象物、対象物認識装置およびプログラム、対象物認識システム
【課題】撮像される認識対象物の予め定められた位置に設けられ、共通平面上に位置する一の識別部と、他の識別部と、を有し、一の識別部を撮像可能な前記共通平面の法線方向に対して予め定められた角度範囲の一部からは他の識別部が撮像されることを抑制する、認識対象物を提供することにある。
【解決手段】撮像される認識対象物であって、予め定められた位置に設けられ、共通平面上に位置する少なくとも3の第一識別部からなる第一識別部群と、前記第一識別部群の位置に基づいて定められる位置に設けられた少なくとも1の第二識別部と、を備え、前記第一識別部は、前記共通平面の法線方向に対して予め定められた角度範囲0〜θ1度にて撮像され、前記第二識別部は、前記共通平面の法線方向に対して予め定められた角度範囲0〜θ2度にて撮像され、θ1とθ2とは、θ1>θ2の関係を有する、ことを特徴とする認識対象物。
(もっと読む)
部品ライブラリデータ作成装置
【課題】異形部品および自立不可能な部品でも容易にかつ迅速にワークに設置可能で、部品ライブラリデータ作成の時間を短縮した部品ライブラリデータ作成装置を提供する。
【解決手段】電子部品を設置するテーブルに所定の間隔で、所定の大きさの穴を開け、下方または上方に突起物のある電子部品の前記突起物を挿入可能とした。さらに駆動系コントローラを備え、電子部品のフォーカスを変更可能なフォーカス駆動機構を有した光学系を備え、駆動系コントローラは、電子部品の厚みに依存したストロークだけフォーカス駆動機構を制御して電子部品のフォーカス変更し、カメラは、変更されたフォーカスでの被写体像を撮像し、3次元画像を作成して電子部品の厚みを認識する。
(もっと読む)
画像認識システム
【課題】撮像面の状態が相違する場合であっても、識別エラーの発生頻度を低く抑える。
【解決手段】カメラ15は、コンロッド41の表面に付された刻印42を撮像し、その画像データを出力する。補助照明13は、光量を変更可能な照射光によってコンロッド41の表面を照射する。画像処理判定部25は、カメラ15が出力した画像データから刻印42を検出して識別する。光量制御部27は、画像処理判定部25が画像データから刻印42を識別できないとき、補助照明13の光量を変更する。
(もっと読む)
撮像装置
【課題】高い解像度を確保しつつ、コントラストおよび精鋭度の低下を防止することが可能な撮像装置を提供すること
【解決手段】撮像装置は、前記光学像と前記撮像素子の一方が他方に対して移動した後に撮像素子から画像信号を取得し、複数回の撮像によって取得した複数の画像信号を統合して各画像信号よりも高解像度の画像信号を生成し、撮像素子の開口部と画素ピッチのサイズはそれぞれ制限されている。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】ディスパリティ画像を生成するためのステレオ画像を撮像するカメラの光軸のずれを補正する。
【解決手段】カメラ21−1,21−2は、異なる視点から、同一の被写体を撮像する。画像ずれ補正部22は、撮像された複数の画像を、ずれ調整部24の調整パラメータ保存部82に保存されている調整パラメータに基づいて変形し、それぞれ補正画像を生成する。マッチング部23は、ステレオマッチング処理によりディスパリティ画像を生成すると共に、複数の補正画像間の視差方向の対応付けが不能な程度を示すエラー量の全画面の積分値をマッチング評価値として算出する。ずれ調整部24は、調整パラメータのうち、視差方向の対応付けに必要とされるパラメータを変化させて、マッチング評価値が最小となるように調整パラメータを更新して、調整パラメータ保存部82に保存する。本発明は、ディスパリティ画像生成装置に適用することができる。
(もっと読む)
画像処理装置、方法、プログラムおよび記録媒体
【課題】測距精度に影響する視差方向のパラメータのキャリブレーション精度を高め、ステレオカメラの測距精度を向上させる画像処理装置、方法、プログラムおよび記録媒体を提供すること。
【解決手段】本発明の画像処理装置は、ステレオカメラが撮影した撮影画像対を取得し、変換情報を使用して撮影画像対を平行化して、その対応点を探索する。そして、当該対応点を使用して撮影画像対の視差値を算出し、変換情報の較正が必要と判断した場合に、ステレオカメラを構成するカメラの回転ずれを考慮した変換情報に較正する。
(もっと読む)
21 - 40 / 353
[ Back to top ]