
Fターム[5B057BA17]の内容
Fターム[5B057BA17]に分類される特許
121 - 140 / 353
ロボットシステムおよびロボットの制御方法

【課題】 センサ座標系を気にせず、ワーク寸法の入力も必要とせずに、計測を含む把持動作の教示、再生をできるようにする。
【解決手段】 ロボット制御装置102において、手動操作でグリッパ107を把持位置へ移動して教示位置として記録し、前記教示位置を中心としてあらかじめ決められた広さを計測範囲として決定し、前記計測範囲をワークの形状計測手段により計測したワーク形状をマスタデータとして前記教示位置と関連づけて記録する。前記マスタデータと計測データを比較する。マスタデータに対する計測データの3次元の位置姿勢を計算して修正量とする。前記修正量にしたがって把持位置を修正し、グリッパ107を把持位置へ移動する指令を生成する。
(もっと読む)
ロボットハンド

【課題】 精度良く物体を選別し、物体を把持することを提供することにある。
【解決手段】 支持部40と、支持部40に設けられ、物体100を把持するための対向する第1及び第2の把持部110と、第1及び第2の把持部110にそれぞれ設けられ、物体100に光を照射するための対向する第1及び第2の光源90と、支持部40に設けられ、且つ、第1及び第2の把持部110を含む平面によって挟まれた領域に設けられ、且つ、光によって照射された物体100を撮像して物体100の画像を取得する撮像装置50と、撮像装置50に接続され、且つ、撮像装置50で取得した画像を処理する画像処理装置とを備えたことを特徴とするロボットハンド。
(もっと読む)
顕微鏡法
本発明は、複数の顕微鏡画像の向上した空間位置識別を提供する画像システム(100)に関する。画像システム(100)は、光(120a)を生成するための光源(102)と、画像化されるスポットのアレイ(109)を備えているテストプレート(108)と、テストプレート(108)上に光(120)を集光する集光レンズ(104)と、テストプレート(108)に対して光(120b)の焦点面を移動するための移動メカニズムと、個々のスポット(109)から複数の原画像を取得するよう構成された検出システム(112)と、画像システム(100)内のテストプレート(108)の相対的位置を正確に示しているデータを生成するために、複数の画像を処理するよう動作する画像処理デバイス(114)とを備えている。 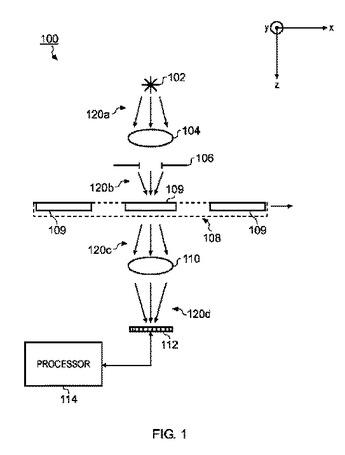 (もっと読む)
(もっと読む)
位置検出部と撮像部との相対位置関係の特定
【課題】位置検出部と撮像部とを有する装置における位置検出部と撮像部との相対位置関係を精度良くかつ簡易に特定する。
【解決手段】位置検出部と撮像部とを有する装置における位置検出部と撮像部との相対位置関係を特定する方法は、(a)位置検出部により検出される基準部と基準部との位置関係が予め設定された参照線とを有する対象面を準備する工程と、(b)位置検出部により基準部を検出する工程と、(c)位置検出部による基準部の検出時に撮像によって画像を取得する工程と、(d)取得された画像における参照線の画像の位置に基づき位置検出部と撮像部との相対位置関係を特定する工程と、を備える。
(もっと読む)
ステレオカメラユニット及びステレオマッチング方法
【課題】ステレオマッチングにおける相関演算を高速処理できるステレオカメラユニット及びステレオマッチング方法を提供する。
【解決手段】このステレオカメラユニット10は、k(k>1)の基線長比を持つ少なくとも2組の基準画像及び参照画像を取得する複数台のカメラと、基線長の短い組の基準画像及び参照画像にウインドウをそれぞれ設定し、両ウインドウで相関演算を実行することで基線長の短い組における視差ds(u,v)を算出する予備相関実行部12と、予備相関実行部12からの視差ds(u,v)をk倍したk×ds(u,v)の視差を生じる条件で制限される範囲の相関演算を短い組と同じ画像位置の基線長の長い組の基準画像及び参照画像に対して実行する相関実行部14と、を備え、相関実行部の相関演算結果から導き出される視差dl(u,v)を出力する。
(もっと読む)
撮像装置
【課題】撮影中の視野を動画像としてモザイク画像上の適切な位置に表示させる際に、フレーム画像の位置合わせに失敗したことを容易に認識することができる撮像装置を提供する。
【解決手段】カメラによって撮影された複数の静止画像を張り合わせてモザイク画像を生成するモザイク画像生成手段と、フレーム画像及びモザイク画像から特徴量を抽出する特徴量抽出手段と、特徴量の比較によってフレーム画像及びモザイク画像間の相対位置を判定する相対位置判定手段と、相対位置の判定結果に基づいてフレーム画像のモザイク画像に対する表示位置を更新し、モザイク画像上に動画像を表示するライブ画像表示手段により構成される。ライブ画像表示手段は、フレーム画像の位置合わせに成功した場合に、上記表示位置を相対位置に応じて変更し、位置合わせに失敗した場合に、上記表示位置を変更せず、位置合わせに成功した最後のフレーム画像の位置付近に固定する。
(もっと読む)
検出装置および方法、並びに、プログラム
【課題】より正確に目の開閉状態を検出する。
【解決手段】顔向き検出部121は、カメラ111により撮影された人の顔の画像である顔画像に基づいて、人の顔の向きを検出する。目検出部122は、顔画像に基づいて、人の目の大きさを検出する。開閉度算出部123は、顔画像における人の目の大きさに基づく人の目の開き具合を示す開閉度を、検出された人の顔の向きに基づいて人の顔を正面から見たときの値に補正した開閉度を算出する。本発明は、例えば、運転者の目の開閉状態を検出する車載装置に適用できる。
(もっと読む)
車両周辺監視装置およびカメラ位置・姿勢判定方法
【課題】カメラの取付け位置および取付け姿勢の適否を簡便かつ正確に判定することができる「車両周辺監視装置およびカメラ位置・姿勢判定方法」を提供することを目的とする。
【解決手段】画像表示処理手段26は、車両周辺俯瞰画像28として、任意のカメラ21,22,23,24に対応する視点変換画像30,31,32,33が、画像28上における車両全長方向に平行な第1の境界線と画像28上における車幅方向に平行な第2の境界線とを挟んで他のカメラ21,22,23,24に対応する視点変換画像30,31,32,33に隣接するような車両周辺俯瞰画像28を表示可能とされていること。
(もっと読む)
ウェーブレット変換を用いた全焦点画像の生成手段
【課題】ウェーブレット変換を用いた全焦点画像の生成手段において、容易にしかも正確に鮮明な合成画像を形成させることを可能にする全焦点画像生成アルゴリズムの提供を目的とする。
【構成】100は前記カメラにより任意に焦点を変えて撮像されたn枚の画像を合成してウェーブレット変換する手段であり、101はウェーブレット変換手段100で処理された画像から低周波成分と高周波成分に分解して得られるウェーブレット変換係数を得て領域の強調を図る手段であり、102は領域の強調手段101で得られた画像に対して多値のモルフォロジー処理を適用し合焦領域を検出する手段であり、103は合焦領域の検出手段102で得られた合焦領域を用いて色彩標本値を合成する手段であり、104は合焦領域の合成手段103によって生成された全焦点画像である。
(もっと読む)
3次元ずれ量計測方法
【課題】アーチファクトの影響を受けず、短時間でかつ正確に、レジストレーションを行う。
【解決手段】基準立体画像を構成する2次元の投影画像をデータベースDB1に保存する。比較対象立体画像を構成する2次元の投影画像をデータベースDB2に保存する。データベースDB1,DB2に保存されている2次元の投影画像から基準立体画像と比較対象立体画像との間のX,Y,Zの3軸の回転ずれ量(Δθ,Δφ,ΔΨ)および平行ずれ量(Δx,Δy,Δz)を求める。
(もっと読む)
建築物変化検出装置、建築物変化検出方法、及びプログラム
【課題】地図上の建築物の変化をより高精度に検出する。
【解決手段】建築物変化検出装置1は、旧年度時点と新年度時点との間における地図上の検出対象領域の建築物の変化を検出する。旧年度画像データ取得部10は、旧年度時点において検出対象領域を撮影した旧年度画像データを取得する。新年度画像データ取得部20は、新年度時点において検出対象領域を撮影した新年度画像データを取得する。地物変化検出部30は、旧年度画像データと新年度画像データとを比較して、検出対象領域における地物の変化を検出する。建築物非存在領域特定部40は、検出対象領域の中において、建築物が存在しない建築物非存在領域を特定する。建築物変化検出部50は、検出対象領域から建築物非存在領域を除外した領域において地物変化検出部30により変化が検出された地物を、検出対象領域において変化した建築物とすることにより、検出対象領域の建築物の変化を検出する。
(もっと読む)
3次元形状生成装置
【課題】被写体の薄い部分が良好に再現されると共に視体積交差法を適用して得られる3次元形状を大きく崩すことなく被写体の3次元形状を良好に再現する。
【解決手段】多視点カメラ画像からシルエット画像を生成する手段2と、生成されたシルエット画像について視体積交差法を適用し、被写体の近似された3次元形状モデルである各種ソリッドモデルを生成する手段3と、カメラ画像間の相互相関値を演算する手段30と、生成されたソリッドモデルについて相互相関値を用いて最大フロー/最小カットアルゴリズムを適用して被写体の3次元形状モデルを生成する手段40とを具える。さらに、シルエット画像とソリッドモデルとに基づいてシルエット拘束値を生成する手段10から出力される値を用いて相互相関値に対して重み付けを行い、重み付けされた相互相関値を用いて最大フロー/最小カット演算を行う。
(もっと読む)
車載カメラのキャリブレーション装置およびキャリブレーション方法
【課題】車載カメラのパラメータ校正と画像処理内容の設定を一括して行うことで、作業の簡略化と作業工数の削減が図られ、コスト低減に寄与することができる車載カメラのキャリブレーション装置およびキャリブレーション方法を提供すること。
【解決手段】車両周辺を撮像するリアカメラ1と、リアカメラ1のレンズ光軸延長位置に設置され、校正パターン情報41を付与したカメラ校正板4と、校正パターン情報41を撮影したカメラ画像を解析することにより、リアカメラ1の位置情報や姿勢情報を含むパラメータを自動的に校正するリアカメラ1のキャリブレーション装置において、カメラ校正板4は、校正パターン情報41以外に、カメラ画像データに基づき所望のモニタ画像データを生成する画像処理に関する情報をタグ情報42として付与し、カメラキャリブレーション手段(図5)は、校正パターン情報41に基づくリアカメラ1のパラメータ校正とタグ情報42に基づく画像処理内容の設定を一括して行う。
(もっと読む)
撮像装置、自動合焦方法、およびその方法をコンピュータが実行するためのプログラム
【課題】画面内の人物の位置/範囲に関わらず、画面内の人物の顔に合焦させて、自動合焦時と撮影時とで構図を変更することなく人物の撮影を行なうことが可能な撮像装置を提供すること。
【解決手段】CPU115aは、入力した画像データの中から人物の顔を検出し、検出された人物の顔の少なくとも一部を測距エリアとして、自動合焦制御を行う。
(もっと読む)
自動車における画像記録システムのキャリブレーション方法
本発明は、自動車(1)における画像記録システムのキャリブレーション方法に関し、自動車の照明装置(13)によって照明された領域の画像データがカメラシステム(11)によって検出され、照明された領域を判定するために、照明装置(13)により照射された光ビームが変調される。  (もっと読む)
(もっと読む)
植生検出装置および方法
【課題】移動体搭載に適し、かつ近距離の観測対象に関して必要十分な植生検出を可能とする。
【解決手段】(1)第1の波長帯域のみを透過させる第1の光学フィルタを有する第1の撮像部と、(2)第2の波長帯域のみを透過させる第2の光学フィルタを有する第2の撮像部と、(3)撮像された画像を画像中の水平線で切り分け、水平線より下の画像は全て地面の平面上にあると仮定して、第1の射影変換を行い、第1の撮像部によって取得された観測データと第2の撮像部によって取得された観測データとを対応付ける対応付け部と、(4)対応付けられた観測データに関して、第1の撮像部によって取得された観測データに基づいて算出される反射率と、第2の撮像部によって取得された観測データに基づいて算出される反射率との比を算出する反射率比算出部と、(5)前記反射率比を所定の閾値と比較することによって、観測対象物が植物か否かを判別する判別部と、を具備する。
(もっと読む)
画像合成装置及びプログラム
【課題】簡便に、主要被写体に重ならず、且つ、主要被写体画像に隣接した最適な位置に素材画像を合成する。
【解決手段】撮像装置100であっては、被写体画像における、当該被写体画像に含まれる主要被写体に係る主要画像領域の位置を特定する処理、特定された主要画像領域の位置に基づいて、予め用意されたCG画像が主要画像領域に重ならずに隣接する位置を取得する処理、取得された位置にCG画像を合成する処理を行うCPU12を備える。
(もっと読む)
画像処理システム、撮像装置、画像処理方法及びコンピュータプログラム
【課題】運転手には瞬時にどの部分が表示されているのかを容易に認識させることが可能で、また変換後の画像の画質を劣化させない、画像処理システムを提供すること。
【解決手段】画像を撮像する撮像装置と、撮像装置で撮像された画像に対して画像処理する制御装置と、制御装置で画像処理された画像を表示する表示装置と、を含んで構成され、車両の周囲の画像を撮像する撮像部と、撮像部で撮像された車両の周囲の画像を、第1の画像から第1の画像の一部領域に対応する第2の画像へ変換する変換部と、表示装置に対する操作を行う操作部と、表示装置が撮像部で撮像された画像以外の第3の画像を表示している場合に操作部の操作に応じて第3の画像から第1の画像に表示画像を変更した後第2の画像を表示するよう変換部及び表示部を制御する制御部と、を含む、画像処理システムが提供される。
(もっと読む)
対象領域抽出装置、対象領域抽出方法、対象領域抽出プログラム及びそのプログラムを記録した記録媒体
【課題】経時的変化のない背景の下で撮像した画像から対象物領域を抽出する。
【解決手段】撮影装置C1.C2にて手指を撮像した画像データが対象領域抽出装置に入力されている。撮影装置C1は、色合いを含まずかつ経時的に変化しない背景の下に手指を撮像している。対象領域抽出装置は、撮影装置の撮影画像から代表的個体肌色情報を取得する(S01)。また、対象領域抽出装置は、代表的個体肌色情報をもとに撮像装置C2の撮像画像を肌色領域および未定領域を含む画像に変換する(S02)。この変換画像中の未定領域に領域拡張処理を施した領域拡張画像を取得する(S03)。この領域拡張画像の肌色領域にラベリング処理を施して手指領域を抽出する(S04)。
(もっと読む)
行動管理システム
【課題】人物の行動を少ないデータ量で記録可能とし、特定の人物に関する行動を容易に検索することができるとともに、人物の認証可能な機会を増加させることで記憶装置に蓄積される映像データを削減することが可能な行動管理装置を提供する。
【解決手段】所定エリア内の人物の行動を管理する行動管理システムにおいて、ビデオカメラV1〜Vn、人物特定部31、認証部34、行動検出部38、文字データ変換部39、記憶部35を有した行動管理装置と、エリア内に設置され各種取引に関する処理を行うNo.1〜No.3ATM52および、No.1〜No.3窓口操作機58と、No.1〜No.3ATM52および、No.1〜No.3窓口操作機58と行動管理装置100とを接続する接続部45と、を備えることを特徴とする。
(もっと読む)
121 - 140 / 353
[ Back to top ]