
Fターム[5B057BA17]の内容
Fターム[5B057BA17]に分類される特許
61 - 80 / 353
撮像装置、物体検出方法及び姿勢パラメータの算出方法
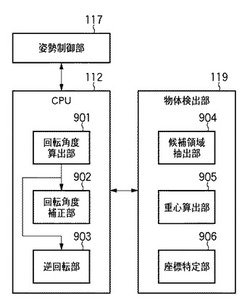
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
三次元撮像のためのデータ取得方法

【課題】計測された三次元オブジェクト・シーンの迅速な自動化されたオブジェクト分類化を可能にする方法。
【解決手段】データ取得中または取得したデータを使用しての計測手順中など、三次元計測手順中においてこの方法を実施することができる。種々の実施例において、オブジェクト・シーンが光ビームで照らされ、画像が取得される。実施例によっては、オブジェクト・シーンが構成された光ビームで照らされ、異なる空間位相のパターンによって照らされたオブジェクト・シーンの画像のシーケンスが取得される。一つまたは複数の画像における複数の点の座標が求められ、前記点のそれぞれについて半透明度の値が求められる。前記点の半透明度の値に基づいて各点のオブジェクト・クラスが決められる。オプションとして、オブジェクト・クラスの決定を補助するため、各点についてグレイスケールまたカラー画像データのような追加の情報を使用することができる。
(もっと読む)
三次元計測装置及び三次元計測方法
【課題】計測対象の信号に発生するノイズを低減し、当該計測対象の三次元形状の計測精度を向上する。
【解決手段】空間を2分割する複数のパターン217〜220を順次計測対象に投射し、そのときの計測対象の画像データを得る。次に、アダマール行例に基づいて符号化された複数のパターン220〜223を順次計測対象に投射し、そのときの計測対象の画像データを得る。次に、アダマール行列の逆行列を用いて、アダマール行例に基づいて符号化されたパターン220〜223を投射して得られた画像データを、複数のスリット光からなるパターンのスリット位置をシフトさせた複数のパターンを投射して得られる画像データに変換する。次に、当該変換した画像データと、空間を2分割するパターン217〜220を投射して得られた画像データとに基づいて、三角測量の原理で計測対象の三次元形状を得る。
(もっと読む)
撮像装置、収差補正方法、および、プログラム
【課題】できるだけ少ないデータと計算量により点対称性が崩れた収差発生パターンにも対応した倍率色収差補正が行えるようにする。
【解決手段】変位量算出部610は、レンズ制御情報に基づいて均一収差補正テーブル620から均一収差補正データ621を選択して収差補正変位量SFT2を算出する。レンズ制御部140は収差補正変位量SFT2に基づいて防振レンズ群132を変位させて均一収差を補正する。同心円状収差補正量算出部213は、レンズ制御情報、処理対象色および像高に基づいて同心円状収差補正テーブル240から同心円状収差補正データ241を選択して同心円状収差補正量を算出する。色ずれ先画素値算出部214および画素値補正部215は、同心円状収差補正量に基づいて処理対象画素が対応する色ずれ先画素の画素値を算出し、算出された画素値により処理対象画素の画素値を書き換える。
(もっと読む)
偏光撮影装置
【課題】被写体からの光の直交する偏光成分を分離して結像させた重像の画像信号から、直交する偏光成分の像間の強度比を算出するに際し、計算を単純化して演算時間を短縮する。
【解決手段】複屈折特性を有する複屈折光学素子13により、被写体1からの光Bを偏光方向が直交する常光線(O光線Bo)と異常光線(E光線Be)とに分離し、マトリクス状に画素が配列された固体撮像素子11の異なる位置にそれぞれO光線像IoおよびE光線像Ieとして結像させる。ここで、重像間変位方向取得部24により取得したO光線像IoとE光線像Ieとの相対的変位方向である重像間変位方向S2と、重像間変位量算出部23により算出したO光線像IoとE光線像Ieとの相対的変位量である重像間変位量Dとに基づき、O光線像とE光線像との間の強度比を算出する。
(もっと読む)
電子部品実装装置
【課題】撮像による画像データを用いてより高精度な実装対象の電子部品の外部情報を取得する。
【解決手段】部品配置部に配置された電子部品を撮像する撮像手段1と、部品配置部と撮像手段との距離を可動調節する可動部111と、これらを制御して、電子部品について部品配置部と撮像手段の距離が異なる複数の画像データを取得する撮像制御部120と、各画像データの同一画素におけるコントラストの対比に基づいて、当該各画素における撮像手段から部品配置部の合焦点位置を求める測距処理部23と、撮像エリア内の各画素における合焦点位置と、各画像データにおける各画素の輝度値とから、撮像エリアの一部の範囲内の画素における合焦点位置での輝度値を求め、局所全焦点画像を生成する全焦点画像生成部25とを備えている。
(もっと読む)
歯科用補綴物計測加工システム
【課題】非接触で口腔内から患者、歯科医師の負担を軽減させながら直接歯科用補綴物の三次元形状データを取得して、正確な歯科補綴物を製造する。
【解決手段】被写口腔内物を静止的に撮影する画像データ化手段、計測時に被計測物の三次元形状が計測可能な状態で前記画像データ化手段の位置が固定された固定部位を持ち口腔内に挿入可能な大きさを持つ支持体、前記画像データ化手段で得られた撮影情報から、被写口腔内物の三次元形状を得る三次元形状取得手段を有する。
(もっと読む)
外観検査装置及び外観検査方法
【課題】基材の色調と光沢の検査にあたり、簡便な構成を有し且つ検査効率の向上が可能な基材の外観検査装置を提供する。
【解決手段】本発明に係る外観検査装置は、光源2と、可視光検出器3と、紫外光検出器4と、制御装置5とを備える。光源2は検査対象である基材1へ向けて、可視光域から紫外光域に亘る光を照射する。可視光検出器3は、光源2から照射されて基材1で反射された可視光域の光を受光して検出する。紫外光検出器4は、光源2から照射されて基材1で反射された紫外光域の光を受光して検出する。制御装置は5、可視光検出器3での検出結果に基づく基材1の色調不良の有無の判定をおこなうと共に紫外光検出器4での検出結果に基づく基材1の光沢不良の有無の判定をおこなう。
(もっと読む)
3次元形状測定機の校正方法及び3次元形状測定機
【課題】ライン光照明系の歪みが高精度に校正するための3次元形状測定機の校正方法、及び、この校正方法により校正された3次元形状測定機を提供する。
【解決手段】被検物17にライン光を投影する照明部であるライン光投影装置16と、被検物17上に投影されたライン光の像を取得する撮像部である測定カメラ11と、を有し、前記像から被検物17の3次元座標を算出する3次元形状測定機1において、3次元座標に含まれるライン光投影装置16の歪みを校正する3次元形状測定機1の校正方法であって、ライン光投影装置16の光軸に対して略垂直に拡散面21aを配置するステップと、ライン光投影装置16部により拡散面21aにライン光を照射して測定カメラ11でライン光の像を取得するステップと、取得した像から3次元座標を校正する補正データを算出するステップと、を有する。
(もっと読む)
映像表示装置、通知方法、及び位置判定装置
【課題】画像処理の負担が軽く、より簡易に最適な3D映像をユーザが見ることができるようにする。
【解決手段】パーソナルコンピュータ10は、LCD17と、LCD17に正対する方向の画像を撮影するカメラ21を有する。CPU111は、位置調整プログラム112cを実行して、3D映像コンテンツの再生中に、カメラ21により撮影された画像中の3Dメガネの位置を検出し、この検出された位置と予め決められた最適位置(基準位置)との相対関係を判別し、この相対関係に応じたメッセージをLCD17において表示させる。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部106を備える。
(もっと読む)
監視装置、監視プログラム及び監視方法
【課題】監視対象とするエリアに移動体が出現する場合でも、撮像部に対する妨害を適切に検知することを課題とする。
【解決手段】監視装置1は、静的領域抽出部1aと、撮像妨害判定部1bとを有する。このうち、静的領域抽出部1aは、所定の監視対象を撮像する撮像部により時系列に撮像された複数の画像から各画像内で被写体の映り方が変化しない領域を静的領域として抽出する。さらに、撮像妨害判定部1bは、撮像部により撮像された画像全体の領域のうち静的領域抽出部1aにより抽出された静的領域を用いて、撮像部に対する撮像妨害が行われたか否かを判定する。
(もっと読む)
映像処理システムおよびその方法
【課題】補間処理による3D画像の表示画面をなめらかにし、後処理を単純化するシステム及び方法を提供する。
【解決手段】異なる画像面を有する2つの隣接するカメラ位置から補間された、複数の補間画像を受け取る工程と、各補間画像に対して、複数の中間画像面のうちのそれぞれ1つへの変換を施す工程とを含み、各中間画像面は、隣接するカメラ位置に関連する補間画像の観察角度に応じて、2つの隣接するカメラ位置の画像面に対して中間の方向を向いて配置する。
(もっと読む)
画像入力装置、画像入力方法及び画像入力プログラム
【課題】特殊な光学系を用いることなく、複数の異なる位置に配置した画像センサでの撮影結果を統合することで、被写体またはカメラが動いている状況、もしくは照明環境が変動している状況下においてもマルチバンド画像の取得を可能にする。
【解決手段】被写体の基準画像を得る第1の撮像手段と、所定の分光透過率を有する光学フィルタを備え、被写体の分光情報画像を得る第2の撮像手段と、第1及び第2の撮像手段により得られた基準画像と分光情報画像との対応点を探索して、三角測量の原理に基づき、分光情報画像の視点位置を基準画像の視点位置に一致させるための画像変形パラメータを求める対応点検出手段と、画像変形パラメータに基づき、分光情報画像の変形処理を行う画像変形処理手段と、基準画像と、画像変形処理手段により画像変形を行った後の分光情報画像とをマルチバンド画像として出力する画像出力手段とを備えた。
(もっと読む)
映像再生装置及び映像再生方法
【課題】三次元表示に対する操作に関し、ユーザの利便性を向上させることができる映像再生装置及び映像再生方法を提供する。
【解決手段】映像再生装置1は、操作対象について視野差を有する第1の映像の対を生成する左右視野映像生成部233と、利用者の三次元の動作を認識する動き認識部22と、動き認識部22が認識した動作に基づいて前記操作対象を操作する操作信号を生成する操作信号生成部236とを有する。
(もっと読む)
画像処理装置、撮像装置、画像処理方法およびプログラム
【課題】高品位な画像回復を行う。
【解決手段】画像処理装置は、被写体のRGBの各色成分に対応する第1フォーカス位置〜第3フォーカス位置で撮像する際の各色成分ごとの複数の劣化画像を取得し、また、その撮像状態と撮像状態に対応する画像回復フィルタを各色成分ごとに取得し、フォーカス位置の撮像状態で得られた画像回復フィルタを使用して各色成分の劣化画像を回復して合成する。
(もっと読む)
3次元位置・姿勢認識装置およびそれを用いたシステム、方法、プログラム
【課題】対象体の3次元位置・姿勢の認識精度を向上させた、3次元位置・姿勢認識装置を提供することを目的とする。
【解決手段】認識対象となる対象体とその3次元モデルとの3次元的位置・姿勢のマッチングを、ICPアルゴリズムによって行う。それには、3次元モデル上の点群(モデル点群)の各点を注目点として採用し、対象体上の計測点群の中から対応点を探索する。計測点群の各点を注目点とする順マッチング処理との比較上、これを逆マッチング処理と呼ぶ。逆マッチングにおいて注目点として採用される点(モデル点)にはノイズが含まれないため、ICPアルゴリズムにおける対応点探索において、ノイズ点を出発点として対応点を捜すということがない。このため、ノイズ等による誤認識を低減できる。逆マッチングを順マッチング処理と組合せる場合には、先に順マッチングを行ってラフなマッチングを済ませた後に、逆マッチングを行うことが好ましい。
(もっと読む)
車両周辺監視装置
【課題】カメラの時系列画像間での特徴点の追跡を行うことなく、計算量を低減させてカメラ運動を精度良く推定する車両周辺監視装置を提供する。
【解決手段】異なる時点で撮像された第1撮像画像Im1及び第2撮像画像Im2について、第1特徴点P1〜P3を抽出すると共に第2特徴点Q1〜Q3を抽出する特徴点抽出処理と、第2撮像画像Im2の撮像時における仮カメラ運動Mkを設定して、各第1特徴点に対応する第2撮像画像Im2での第2エピポーラ線EL11〜EL13を求め、第2エピポーラ線までの距離が最小となる第2特徴点を抽出して、該最小の距離を各第1特徴点の距離誤差dとし、各第1特徴点の距離誤差の総和が最小となる仮カメラ運動Mkを求める仮カメラ運動最適化処理と、距離誤差dの総和が最小となる仮カメラ運動Mkを、カメラ運動として推定するカメラ運動推定処理とを実行する。
(もっと読む)
距離取得装置
【課題】ステレオカメラで撮影したステレオ画像から、精度の高い距離測定を行うことができるとともに処理時間の短い距離取得装置を提供する。
【解決手段】ステレオカメラで撮影した複数のステレオ画像ペアを入力する画像入力手段8と、各画像ペアから視差を計算する複数の第一の視差検出手段11、12、13、14と、第一の視差検出手段により検出された視差が所定の範囲の場合に、前記視差検出に使用した画素を含む各画像ペアの一方の画像の領域において画素を補間する複数の画像補間手段と、前記画素補間された領域を使用して視差を計算する複数の第二の視差検出手段と、ステレオ撮像系の基線長に基づいて正規化する正規化手段と、正規化された視差を用いて視差類似評価を行う視差類似評価手段15と、距離検出手段16とを有し、視差評価において、視差検出1の結果と視差検出3の結果の二つだけを利用して視差評価を行う。
(もっと読む)
ずれ量算出方法およびずれ量算出装置
【課題】立体画像撮影用の2台のカメラ間のずれ量を算出する。
【解決手段】第1の画像内の特徴点の位置と、第2の画像内の対応する特徴点の位置とを特定する特定器と、上記第1の画像および上記第2の画像内において、上記第1の画像および上記第2の画像のそれぞれを撮影するカメラの光軸を確定する確定器と、所定のモデルを用いて、上記第1の画像内の上記特徴点の位置と、上記第2の画像内の上記対応する特徴点の位置との間のずれ量を演算する演算器と、ランダムサンプルコンセンサス技術を用いて、上記演算されたずれ量の妥当性を試験する試験器とを具備し、上記ずれ量は、上記第1の画像および上記第2の画像のそれぞれの上記確定された光軸に関する、上記第1の画像の上記特徴点の位置と、上記第2の画像の上記対応する特徴点の位置とに応じて算出され、上記試験されたずれ量は、所定の条件を達成したときに妥当とされる。
(もっと読む)
61 - 80 / 353
[ Back to top ]